构造柱混凝土浇筑机器人及构造柱浇筑方法与流程
1.本发明涉及建筑施工技术领域,具体涉及一种构造柱混凝土浇筑机器人及构造柱浇筑方法。
背景技术:
2.传统的构造柱施工方式比较落后,主要在构造柱模板支设后,采用人工浇筑混凝土,一方面,传统的施工方式对工人技术经验依赖性高,另一方面,施工效率低,造成构造柱实体质量参差不齐。
3.公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现要素:
4.为克服现有技术所存在的缺陷,现提供一种构造柱混凝土浇筑机器人及构造柱浇筑方法,以解决传统的构造柱浇筑方式效率低且构造柱实体质量参差不齐的问题。
5.为实现上述目的,提供一种构造柱混凝土浇筑机器人,包括:
6.电动移动承台,安装有定位装置;
7.用于容置混凝土浆液的储料箱,安装于所述电动移动承台,所述储料箱安装有浇筑管,所述浇筑管安装有用于泵送所述混凝土浆液的输送泵,所述浇筑管的出浆口安装有用于采集所述出浆口至构造柱模板内的混凝土液面的实时距离的距离传感器,所述浇筑管上安装有电子流量计;
8.振捣装置,包括容置箱,所述容置箱通过电动升降器可升降地安装于所述电动移动承台上,所述容置箱的外侧连接有导向套筒,所述导向套筒中弹性安装有敲击件,所述容置箱内安装有吸附于所述敲击件的电磁件;
9.控制装置,包括控制模块、用于在所述储料箱内的混凝土浆液的剩余量小于预设储料阈值时生成叫灰信号的叫灰模块、用于在所述混凝土浆液的泵送量与所述构造柱模板中的浇筑量之间的实际浆差值超出预设容差值时生成漏浆信号的测漏模块,所述控制模块连接于所述电动移动承台、所述定位装置、所述输送泵、所述距离传感器和所述电子流量计,所述叫灰模块和所述测漏模块分别连接于所述控制模块。
10.进一步的,所述叫灰模块包括:
11.用于基于所述容置箱的装载量和所述泵送量以计算获得所述剩余量的第一计算单元,连接于所述控制模块;
12.用于判断所述剩余量是否小于所述预设储料阈值并在所述剩余量小于所述预设储料阈值时生成所述叫灰信号的第一判定单元,连接于所述第一计算单元和所述控制模块。
13.进一步的,所述侧漏模块包括:
14.用于基于所述液面高度和所述构造柱的尺寸计算获得所述浇筑量的第二计算单
元,连接于所述控制模块;
15.用于基于所述泵送量与所述浇筑量计算获得所述实际浆差值的第三计算单元,连接于所述第二计算单元;
16.用于判定所述实际浆差值是否超出所述预设容差值并在所述实际浆差值超出所述预设容差值时生成所述漏浆信号的第二判定单元,连接于所述第三计算单元和所述控制模块。
17.进一步的,所述控制模块连接有用于基于泵送流量和泵送时长计算获得所述泵送量的第四计算模块。
18.进一步的,所述电动移动承台安装有用于探测障碍物的探测装置,所述探测装置连接于所述控制模块。
19.进一步的,所述探测装置为探测雷达。
20.进一步的,还包括服务端,所述服务端无线信号连接于所述控制模块,所述服务端连接有显示屏。
21.本发明提供一种采用构造柱混凝土浇筑机器人的构造柱浇筑方法,包括以下步骤:
22.于储料箱中灌满混凝土浆液,并将施工区域内的待浇筑的构造柱模板的第一位置信息输入控制装置的控制模块中;
23.所述控制模块获取电动移动承台上的定位装置采集的电动移动承台的第二位置信息并基于所述位置第一位置信息形成浇筑路径;
24.所述电动移动承台基于所述浇筑路径移动至一个所述构造柱模块处,使得浇筑管的出浆口伸至对准所述构造柱模板的内腔中;
25.所述控制模块开启输送泵以将所述储料箱中的混凝土浆液经由所述出浆口泵送至所述构造柱模板的内腔中,所述出浆口处的距离传感器实时采集所述出浆口至所述构造柱模板内的混凝土液面的实时距离;
26.所述控制模块获取所述实时距离,在所述实时距离达到距离阈值时,所述控制模块关停所述输送泵以令所述电动移动承台移动至下一个所述构造柱模板处,在构造柱浇筑过程中,叫灰模块在所述储料箱内的混凝土浆液的剩余量小于预设储料阈值时生成叫灰信号、测漏模块在所述混凝土浆液的泵送量与所述构造柱模板中的浇筑量之间的实际浆差值超出预设容差值时生成漏浆信号,所述控制模块在获取叫灰信号后暂停所述输送泵,操作人员在获取所述叫灰信号后向所述储料箱中补充混凝土浆液,所述操作人员在获取所述漏浆信号后进设备检修,在浇筑同一根所述构造柱时,当所述液面上升一预设高度后,所述控制模块暂停所述输送泵,所述控制模块通过电动升降器升降容置箱,使得所述容置箱的外侧的敲击件贴合于所述液面以下的构造柱模块的外侧,在所述控制模块对所述电磁件间歇性通电后,所述敲击件敲击所述构造柱模板以令所述构造柱模板的内侧的混凝土浆液振捣密实。
27.本发明的有益效果在于,本发明的构造柱混凝土浇筑机器人及构造柱浇筑方法,通过机器人施工,可以节省劳动力,智能浇筑振捣施工质量稳定,机器人可以不间断施工,而且工作效率快,施工效率是工人施工的数倍,通过测算找出最优的施工数据,把数据录入控制装置,可以保证施工质量。
附图说明
28.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
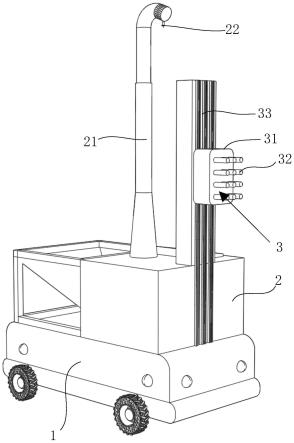
29.图1为本发明实施例的构造柱混凝土浇筑机器人的主视图。
30.图2为本发明实施例的构造柱混凝土浇筑机器人的正面立体结构示意图。
31.图3为本发明实施例的构造柱混凝土浇筑机器人的背面立体结构示意图。
具体实施方式
32.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
33.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
34.参照图1至图3所示,本发明提供了一种构造柱混凝土浇筑机器人,包括:电动移动承台1、储料箱2、振捣装置3和控制装置4。
35.其中,电动移动承台1安装有定位装置。电动移动承台包括承台板和电动滚轮。承台板上安装有多个电动滚轮。承台板上还安装有电源。电源为电动滚轮、储料箱、振捣装置和控制装置等设备提供电能。在一些实施例中,电源为蓄电池。
36.储料箱2用于容置混凝土浆液。储料箱2安装于电动移动承台1。在一些实施例中,储料箱中安装有搅拌轴。储料箱的外部安装有电机。电机传动连接于搅拌轴。搅拌轴能避免储料箱中的混凝土浆液沉淀分层,使得混凝土浆料拌合均匀。
37.在本实施例中,储料箱2安装有浇筑管21。浇筑管21安装有用于泵送混凝土浆液的输送泵。浇筑管21的出浆口安装有距离传感器22。距离传感器22用于采集出浆口至构造柱模板内的混凝土液面的实时距离。由于出浆口的高度固定,所以,通过采集实时距离可以计算获得液面的实际高度。
38.浇筑管21上安装有电子流量计。电子流量计能获取泵送的混凝土的体积。
39.振捣装置3包括容置箱31、导向套筒、敲击件32和电动升降器33。其中,容置箱31通过电动升降器33可升降地安装于电动移动承台1上。容置箱31的外侧连接有导向套筒。导向套筒中弹性安装有敲击件32。容置箱31内安装有吸附于敲击件32的电磁件。
40.在本实施例中,电动升降器包括竖设于储料箱上的多根导轨和顶升驱动件。导轨开设有竖向设置的滑槽。容置箱的一侧连接有多根滑块。多根滑块一一对应地滑设于导轨的滑槽中。顶升驱动件安装于滑槽中,用于驱动滑块在滑槽中作上下升降运动。
41.容置箱内安装有电磁件。敲击件为磁性金属棒。磁性金属棒的一端滑设于导向套筒中,磁性金属棒的另一端伸至导向套筒的外部。磁性金属棒的一端与导向套筒的筒底之间连接顶撑弹簧。在本实施例中,顶撑弹簧为螺旋弹簧。磁性金属棒可沿导向套筒的轴向方向移动。在电磁件通电后,电磁件产生磁性以吸附磁性金属棒,而当电磁件断电后,由于顶撑弹簧的推力,使得磁性金属棒朝向导向套筒的外部弹出进而撞击构造柱模板的外侧,使得构造柱模板的内侧的混凝土浆液振捣密实。
42.在本实施例中,容置箱的宽度为150mm,高度200mm。敲击件的数量为12根。多根敲
击件呈矩阵式排布。
43.控制装置4包括控制模块、叫灰模块和测漏模块。控制模块连接于电动移动承台1、定位装置、输送泵、距离传感器22和电子流量计。叫灰模块和测漏模块分别连接于控制模块。
44.叫灰模块,在储料箱2内的混凝土浆液的剩余量小于预设储料阈值时,生成叫灰信号。
45.测漏模块,在混凝土浆液的泵送量与构造柱模板中的浇筑量之间的实际浆差值超出预设容差值时,生成漏浆信号。
46.控制模块用于获取叫灰信号和漏浆信号。在构造柱浇筑过程中,当控制模块获取到漏浆信号后,控制模块暂停输送泵以等待操作人员的检修。而在设备恢复后,控制模块开启输送泵继续浇筑构造柱。
47.本发明的构造柱混凝土浇筑机器人还包括服务端,服务端无线信号连接于控制模块。服务端连接有显示屏。在构造柱浇筑过程中,当控制模块获取叫灰信号后,控制模块向服务端发送叫灰信号。服务端接收叫灰信号后,通过服务端通知施工人员将混凝土浆液经由储料箱旁边设置的料斗灌注于储料箱中,使得构造柱浇筑能持续进行。
48.具体的,在本实施例中,叫灰模块包括:第一计算单元和第一判定单元。其中,第一计算单元连接于控制模块。第一判定单元连接于第一计算单元和控制模块。
49.第一计算单元用于基于容置箱31的装载量和泵送量以计算获得剩余量。
50.第一判定单元用于判断剩余量是否小于预设储料阈值并在剩余量小于预设储料阈值时生成叫灰信号。
51.在本实施例中,侧漏模块包括:第二计算单元、第三计算单元和第二判定单元。第二计算单元连接于控制模块。第三计算单元连接于第二计算单元。第二判定单元连接于第三计算单元和控制模块。
52.其中,第二计算单元用于基于液面高度和构造柱的尺寸计算获得浇筑量。
53.第三计算单元用于基于泵送量与浇筑量计算获得实际浆差值。
54.第二判定单元用于判定实际浆差值是否超出预设容差值并在实际浆差值超出预设容差值时生成漏浆信号。
55.作为一种较佳的实施方式,控制模块连接有第四计算模块。第四计算模块用于基于泵送流量和泵送时长计算获得泵送量。电子流量计用于采集输送管的泵送混凝土浆液的泵送流量。电子流量计连接有计时器。控制模块获取计时器的时间戳,即,相邻两个时间戳的泵送流量之差即为混凝土浆液的泵送量。
56.作为一种较佳的实施方式,电动移动承台1安装有用于探测障碍物的探测装置。探测装置连接于控制模块。探测装置为探测雷达。电动移动承台还安装有警示灯具。
57.当探测雷达探测前方有障碍物后,控制装置的控制模块根据与障碍物的不同距离通过报警灯具或报警器发出不同警报信号,同时采取制动和规避措施,避免碰撞的发生。
58.本发明提供一种采用构造柱混凝土浇筑机器人的构造柱浇筑方法,其特征在于,包括以下步骤:
59.s1:于储料箱2中灌满混凝土浆液,并将施工区域内的待浇筑的构造柱模板的第一位置信息输入控制装置4的控制模块中。
60.s2:控制模块获取电动移动承台1上的定位装置采集的电动移动承台1的第二位置信息并基于位置第一位置信息形成浇筑路径。
61.操作人员或施工人员把设计完成的施工区域的bim模型(建筑信息模型building information modeling)信息录入到机器人的控制模块中。控制模块能够根据轴网自动定位构造柱位置。电动移动承台在控制模块的控制操作下自动行走到构造柱施工区域,等到施工完成后会自动进入下一施工区域。
62.s3:电动移动承台1基于浇筑路径移动至一个构造柱模块处,使得浇筑管21的出浆口伸至对准构造柱模板的内腔中。
63.s4:控制模块开启输送泵以将储料箱2中的混凝土浆液经由出浆口泵送至构造柱模板的内腔中,出浆口处的距离传感器22实时采集出浆口至构造柱模板内的混凝土液面的实时距离。
64.s5:控制模块获取实时距离,在实时距离达到距离阈值时,控制模块关停输送泵以令电动移动承台1移动至下一个构造柱模板处,在构造柱浇筑过程中,叫灰模块在储料箱2内的混凝土浆液的剩余量小于预设储料阈值时生成叫灰信号、测漏模块在混凝土浆液的泵送量与构造柱模板中的浇筑量之间的实际浆差值超出预设容差值时生成漏浆信号,控制模块在获取叫灰信号后暂停输送泵,操作人员在获取叫灰信号后向储料箱2中补充混凝土浆液,操作人员在获取漏浆信号后进设备检修,在浇筑同一根构造柱时,当液面上升一预设高度后,控制模块暂停输送泵,控制模块通过电动升降器33升降容置箱31,使得容置箱31的外侧的敲击件32贴合于液面以下的构造柱模块的外侧,在控制模块对电磁件间歇性通电后,敲击件32敲击构造柱模板以令构造柱模板的内侧的混凝土浆液振捣密实。
65.在本实施例中,预设储料阈值是构造柱混凝土浇筑机器人所处的位置能接收混凝土浆液补充的时间长度和输送泵泵送速度推算出的混凝土浆液量。即在储料箱中的混凝土浆液量达到预设储料阈值后,控制模块向服务端发送叫灰信号,服务端通过人工或机器将混凝土浆液送至构造柱混凝土浇筑机器人所处的位置后,保证储料箱中的混凝土浆液不间断供应构造柱浇筑。
66.浇筑混凝土量(泵送量)=每秒钟混凝土浇筑量
×
浇筑时间。
67.储料箱内的剩余混凝土量=装载混凝土量-浇筑混凝土量。
68.浆差值=浇筑混凝土量-构造柱混凝土量。预设容差值就是浇筑混凝土量与构造柱混凝土量之间的允许的误差值。
69.构造柱混凝土量的计算方式:通过输送泵的泵送时间,通过计算每秒钟混凝土浇筑量和浇筑时间相乘得出浇筑混凝土量。基于构造柱内混凝土高度和构造柱的横截面的尺寸来计算构造柱内混凝土量。
70.在本实施例中,还可以通过控制装置输入指令:控制装置的控制面板可以手动输入工作指令,设置浇筑参数、浇筑位置、浇筑高度、浇筑工作量、浇筑时间、振捣频率等数值。
71.服务端将bim虚拟模型和构造柱混凝土浇筑机器人之间通过基站无线信号交互,机器人的位置能够实时显示在服务端中的bim虚拟模型中,点击可以查看机器人运行状态。
72.本发明的构造柱混凝土浇筑机器人及构造柱浇筑方法,通过机器人施工,可以节省劳动力,智能浇筑振捣机器人可以不间断施工,而且工作效率快,施工效率是工人施工的数倍,通过测算找出最优的施工数据,把数据录入控制装置,可以保证施工质量。
73.经过测试,本发明的构造柱混凝土浇筑机器人8分钟可以施工完成一根构造柱,一天可以完成135根构造柱,施工效率是工人施工的4.5倍,是机械施工的3倍。通过测算找出最优的施工数据,把数据录入控制系统,可以保证施工质量。
74.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1