预制梁钢绞线穿束设备的制作方法
1.本实用新型涉及桥梁预制梁施工技术领域,特别涉及一种预制梁钢绞线穿束设备。
背景技术:
2.预制梁预应力钢绞线的后张法施工,广泛应用于桥梁工程和建筑工程中,可以有效的提高混凝土的强度,控制构件裂缝的扩展。在整个预应力钢绞线的施工中,波纹管定位以及钢绞线穿束过程极为复杂且施工过程较长,目前桥梁钢绞线穿束一般采用人工穿束和机械穿束配合人工穿束的方式;对于长度小于50m的钢绞线,一般采用人工进行穿束,如果长度大于50m或更长如100m或200m等,采用人工穿束不仅劳动强度大,需要大量的劳动力,同时效率低下。现有的穿束设备虽然能够在一定程度上替代人力,减轻人员的劳动强度,但在自动化程度还有待提高,以满足预制梁钢绞线穿束施工的现场要求。
技术实现要素:
3.本实用新型针对现有钢绞线穿束设备劳动强度大、穿束操作效率低的问题,提供一种预制梁钢绞线穿束设备。
4.为解决上述技术问题,本实用新型采用的技术方案如下:
5.预制梁钢绞线穿束设备,包括设置于预制梁一端的钢绞线穿束机和设置于预制梁另一端的钢绞线位置检测装置,所述钢绞线位置检测装置用于检测穿过预制梁的钢绞线线束端部所在的位置;位于钢绞线穿束机上设置有信号接收装置,所述信号接收装置连接到钢绞线位置检测装置,用于接收钢绞线位置检测装置发送的检测信号。
6.作为上述技术方案的进一步改进,所述钢绞线位置检测装置采用红外线感应器。
7.作为上述技术方案的进一步改进,位于钢绞线位置检测装置的设置位置处设置有摄像头,位于钢绞线穿束机上设置有显示器,所述显示器连接摄像头,用于接收摄像头拍摄的图像信息。
8.作为上述技术方案的进一步改进,所述钢绞线位置检测装置、摄像头设置于支座上,所述支座为高度可调节结构。
9.作为上述技术方案的进一步改进,所述钢绞线穿束机包括机体和设置在机体内的导向辊组和传动辊组,所述传动辊组连接电机,所述电机可驱动传动辊组中传动辊的正转或反转,实现钢绞线的输送与回收操作。
10.作为上述技术方案的进一步改进,所述钢绞线穿束机上分别设置有进束口和出束口,位于出束口位置设置有切割机。
11.作为上述技术方案的进一步改进,所述钢绞线穿束机设置在移动底座上,所述钢绞线穿束机与移动底座之间设置有可调节钢绞线穿束机高度位置的高度调节机构。
12.本实用新型所具有的有益效果:
13.1)该穿束设备采用在穿束机的另一端设置钢绞线位置检测装置,当钢绞线位置检
测装置检测到钢绞线通过的信号后,说明钢绞线已经穿设到位置,此时钢绞线位置检测装置将检测到的信号传输到信号接收装置,当信号接收装置接收到信号后停止输送钢绞线,并通过切割机切断钢绞线,然后进行下一根钢绞线的穿设,从而只需要一个人就可以完成预制梁中钢绞线的穿设,并能够保证钢绞线穿设长度的一致性。
14.2)在钢绞线位置检测装置位置设置摄像头获取钢绞线穿设位置的图像信息,获取的图像在显示器上进行显示,进一步保证穿设过程信息的准确性,避免红外线感应器检测错误或外界对其造成的干扰导致的穿设不到位的问题。
15.3)穿束设备中的钢绞线位置检测装置、钢绞线穿束机的高度可调节控制,可在完成一个位置上钢绞线的穿设后,通过调节两者的高度后,实现对预制梁上另一个位置处钢绞线的穿设,提高了钢绞线穿设的自动化程度,提高了钢绞线的穿设效率。
16.4)穿束设备中钢绞线穿束机通过传动辊组向波纹管内输送钢绞线,并通过控制传动辊的转动方向,实现钢绞线的输送与回收操作,这样在穿设过程中,当钢绞线发生缠绕或与波纹管之间发生干涉时,通过控制传动辊的转动方向,控制钢绞线回收一定距离,保证钢绞线穿设过程的正常进行;同时,在钢绞线穿设过程中,当红外线感应器检测到钢绞线位置信号时,为了避免红外线感应器对下一根钢绞线穿设信号检测的影响,这里可以通过控制传动辊的转动方向,将钢绞线回收一定的距离,从而能够通过红外线感应器实现在穿设过程中对同一位置处多根钢绞线穿设位置的检测。
附图说明
17.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
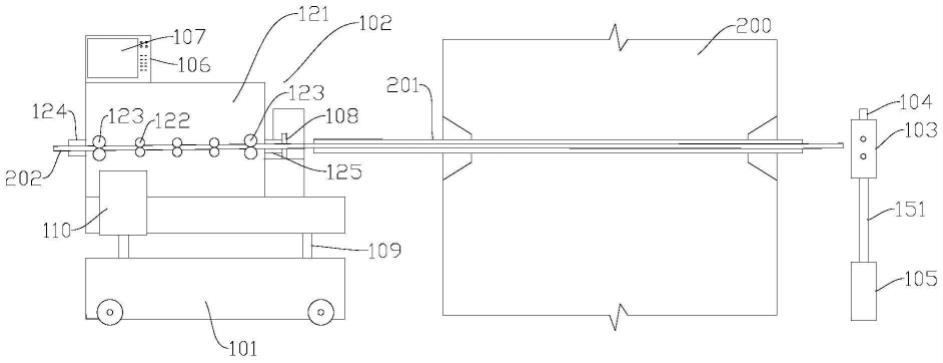
18.图1为本实用新型预制梁钢绞线穿束设备结构主视图。
19.图2为本实用新型预制梁钢绞线穿束设备中钢绞线穿束机右视图。
20.图中:101、移动底座,102、钢绞线穿束机,121、机体,122、导向辊组,123、传动辊组,124、进束口,125、出束口,103、钢绞线位置检测装置,104、摄像头,105、支座,151、电动伸缩杆,106、信号接收装置,107、显示器,108、切割机,109、高度调节机构,110、座椅。
21.200、预制梁,201、波纹管,202、钢绞线。
具体实施方式
22.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。
23.如图1和2所示,本实施例中的预制梁钢绞线穿束设备,包括设置于预制梁200一端的钢绞线穿束机102和设置于预制梁200另一端的钢绞线位置检测装置103,所述钢绞线位置检测装置103用于检测穿过预制梁的钢绞线202线束端部所在的位置,这里的钢绞线位置检测装置103可采用红外线感应器,当钢绞线线束端部进入到该红外线感应器的检测范围内时,红外线感应器会产生相应的检测信号,这里红外线感应器型号可根据需要在市面上
现有型号中进行合理的选择,其对钢绞线穿设位置的检测是现有技术,这里只涉及对红外线感应器的应用,不涉及对其结构、功能及电路的改进。
24.位于钢绞线穿束机102上设置有信号接收装置106,所述信号接收装置连接106到钢绞线位置检测装置103,用于接收钢绞线位置检测装置发送的检测信号。这里的信号接收装置与红外线感应器之间信号的传输可采用有线或无线的方式,信号接收装置用于接收红外线感应器传输的检测信号。信号接收装置所能够采用的结构,以及信号接收装置与红外线感应器之间实现其信号传输的连接结构、电路结构同样是现有技术,其相应的结构和应用对本领域技术人员来说是清楚的。
25.在钢绞线穿束过程中,当钢绞线输送到红外线感应器位置处时,红外线感应器感应到钢绞线的红外信号后,将检测到的信号发送到钢绞线穿束机位置的信号接收装置106,当信号接收装置接收到信号后,通过自动或人工控制的方式停止钢绞线的输送,从而可实现对钢绞线穿设位置的自动检测。此时采用该穿束设备只需要一个人就可以完成预制梁中钢绞线的穿设,并能够保证钢绞线穿设长度的一致性。
26.作为本实用新型的另一种实施方式,位于钢绞线位置检测装置103的设置位置处设置有摄像头104,位于钢绞线穿束机102上设置有显示器107,所述显示器107连接摄像头104,用于接收摄像头拍摄的图像信息。在钢绞线位置检测装置位置设置摄像头获取钢绞线穿设位置的图像信息,获取的图像在显示器上进行显示,以确认钢绞线穿设到预定的位置处,进一步保证穿设过程信息的准确性,避免红外线感应器检测错误或外界对其造成的干扰导致的穿设不到位的问题。同样地这里摄像头、显示器均采用市售的设备,可根据需要在现有的产品中选择合适的型号以实现本穿束设备所要实现的功能;在明确要实现的功能的前提下,摄像头与显示器之间的信号传输以及其所能够采用的实现结构和实现方式对本领域技术人员来说是清楚的,且本实用新型中并不涉及对其电路、通信结构的改进。
27.这里钢绞线位置检测装置103、摄像头104设置于支座105上,所述支座105为高度可调节结构。可调节高度的支座结构可以采用在支座105上设置电动伸缩杆151,将钢绞线位置检测装置103和摄像头104设置于电动伸缩杆151的另一端;同时在钢绞线穿束机一端可设置控制器,控制器连接电动伸缩杆151,通过控制器连接电动伸缩杆动作,控制电动伸缩杆的升降动作,这样在钢绞线穿束过程中,当完成一个位置上钢绞线的穿设后,通过控制器来调节电动伸缩杆的伸缩动作,将钢绞线位置检测装置103和摄像头104调节到预制梁另一穿设位置,即可实现对预制梁在另一位置处钢绞线的穿设操作。
28.这里的钢绞线穿束机102包括机体121和设置在机体内的导向辊组122和传动辊组123,所述传动辊组123连接电机,所述电机可驱动传动辊组中传动辊的正转或反转,实现钢绞线的输送与回收操作。钢绞线穿束机通过传动辊组向预制梁穿束孔的波纹管内输送钢绞线,并通过控制传动辊组中传动辊的转动方向,实现钢绞线的输送与回收操作,这样在钢绞线的穿设过程中,当各钢绞线之间发生缠绕或钢绞线与波纹管之间发生干涉时,通过控制传动辊的转动方向,控制钢绞线回收一定距离,然后继续钢绞线的输送操作,以保证钢绞线穿设过程的正常进行;同时,在钢绞线穿设过程中,当红外线感应器检测到钢绞线位置信号时,为了使红外线感应器能够对下一根钢绞线的穿设进行检测,这里的穿束设备可以通过电机控制传动辊的转动方向,使传动辊反向转动,将钢绞线回收一设定的距离,使钢绞线的端部运动到红外线感应器的检测范围外,从而能够通过红外线感应器实现在穿设过程中对
同一位置处多根钢绞线穿设位置的检测。
29.在钢绞线穿束机102上分别设置有用于钢绞线进入的进束口124和用于钢绞线穿出的出束口125,位于出束口125位置设置有切割机108。钢绞线从进束口进入到传动辊组,依次经传动辊组、导向辊组和设置于另一端的传动辊组实现对钢绞线的连续输送,当钢绞线输送到位后,控制切割机启动,将钢绞线切断,完成该钢绞线的穿设操作。
30.钢绞线穿束机102设置在移动底座101上,以方便钢绞线穿束机102的移动操作,方便将钢绞线穿束机运动到穿束位置;钢绞线穿束机102与移动底座101之间设置有可调节钢绞线穿束机高度位置的高度调节机构109;这里高度调节结构可采用剪叉升降平台,通过液压控制或电控控制剪叉升降平台的升降来实现对钢绞线穿束机高度位置的调节。在钢绞线穿设过程中,在完成一个位置上钢绞线的穿设后,调节钢绞线穿束机的高度位置,使其运动到预制梁的下一安装位置处,即可实现对另一位置处钢绞线的穿设操作。
31.在移动底座101上位于钢绞线穿束机一侧可设置座椅110,进一步方便人员的穿束操作。
32.下面结合图1和2中的穿束设备,以单根钢绞线的穿束操作为例,对本实施例中穿束设备的钢绞线穿设操作过程详细说明如下:
33.将穿束设备运动到预制梁位置,控制剪叉升降平台动作将钢绞线穿束机运动到待穿设钢绞线的波纹管201所在位置高度;将钢绞线202从进束口输送到钢绞线穿束机102,电机控制传动辊组动作,实现钢绞线向波纹管内的穿设输送;当预制梁另一端的红外线感应器检测到钢绞线信号后,红外线感应器将检测到的信号发动到信号接收装置,信号接收装置在接收到该信号后,通过发出报警提示的方式或自动控制的方式,由人工或自动控制钢绞线穿束机停止输送动作,通过显示屏观察钢绞线的穿设位置,以进一步确认钢绞线是否穿设到位;然后,控制传动辊组反转,将钢绞线回收一设定的距离,使钢绞线回收运动到红外线感应器检测范围外;启动切割机切断钢绞线,即可完成一根钢绞线的穿设操作。此时稍微调整钢绞线穿束机的高度位置,向该位置处波纹管内穿设另一钢绞线,按照上述过程依次完成该位置处钢绞线的穿设操作。在完成该位置处全部钢绞线的穿设操作后,通过控制器调节电动撑杆、剪叉升降平台动作,调节红外线感应器、摄像头、钢绞线穿束机的高度位置,使其运动到预制梁的另一穿设位置处,按照上述穿束操作过程即可完成预制梁上另一穿设位置处钢绞线的穿设操作。
34.在本实用新型的描述中,需要说明的是,所采用的术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
35.此外,本实用新型的描述中若出现“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
36.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间
媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
37.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1