一种无人驾驶技术智能停车用缓冲限距装置的制作方法
1.本实用新型涉及智能停车的缓冲限距领域,具体涉及一种无人驾驶技术智能停车用缓冲限距装置。
背景技术:
2.智慧停车是指将无线通信技术、移动终端技术、gps定位技术、gis技术等综合应用于城市停车位的采集、管理、查询、预订与导航服务,实现停车位资源的实时更新、查询、预订与导航服务一体化,实现无人驾驶技术进行智能停车,停车位上会装设有挡轮块进行对智能停车的位置进行阻挡限位,但材质较硬的挡轮块对车轮造成磨损,加速车轮的损耗,且无人驾驶智能停车时,车身后侧的传感器无法更好感应距离挡轮块的间距,缺乏对车轮的缓冲限距的问题。
技术实现要素:
3.为克服现有技术所存在的缺陷,现提供一种无人驾驶技术智能停车用缓冲限距装置,以解决在材质较硬的挡轮块对车轮造成磨损,加速车轮的损耗,且无人驾驶智能停车时,车身后侧的传感器无法更好感应距离挡轮块的间距,缺乏对车轮的缓冲限距的问题。
4.为实现上述目的,提供一种无人驾驶技术智能停车用缓冲限距装置,包括:
5.距离传感器,位于限距块上端表面,所述距离传感器电线连接有小型控制器,所述小型控制器螺接在限距块后侧;
6.感应板,位于距离传感器右侧,所述感应板前端表面黏合有防护海绵;
7.阻尼缓冲器,位于限距块前端凹槽内,所述阻尼缓冲器前端通过缓冲弹簧连接有缓冲块;
8.限位柱,位于阻尼缓冲器左右侧,所述限位柱前端焊接在缓冲块后端表面。
9.进一步的,所述缓冲块表面设置有橡胶弧块,所述橡胶弧块后端黏合有缓冲板,所述缓冲板后端黏合有支撑面板。
10.进一步的,所述橡胶弧块前端表面滑动连接有滚珠,所述支撑面板下端内部连接有滚轮,所述支撑面板后端中部连接有两组阻尼缓冲器。
11.进一步的,所述限距块后端焊接有后置盒;且小型控制器位于后置盒内部,所述后置盒左右侧壁设置有散热网孔。
12.进一步的,所述限距块、缓冲块和感应板构成缓冲限距装置,所述感应板下端后侧连接有两组电动推杆;且电动推杆电线连接有小型控制器。
13.进一步的,所述电动推杆前端镶嵌固定有连接板;且连接板左右端与限距块侧壁相螺接,所述限距块左右端焊接有衔接块。
14.进一步的,所述限距块端凹槽内壁上焊接有限位槽块,所述限位槽块内部设置有限位槽;且限位槽内部与限位柱后端相连接。
15.本实用新型的有益效果在于,本实用新型的无人驾驶技术智能停车用缓冲限距装
置利用阻尼缓冲器和限位柱,使缓冲块与限距块缓冲连接,便于缓冲、阻挡智能停车时汽车后轮的移动,同时缓冲块表面橡胶弧块的滚珠与车轮相接触,便于减小车轮受到的磨损,延长汽车车轮的使用寿命,通过距离传感器检测车轮后移的距离,控制电动推杆推动感应板向前推动,便于缩短感应板与汽车后侧传感器之间的距离,便于无人驾驶技术智能控制汽车停止,起到限距的作用,方便车身后侧的传感器更好感应距离限距块的间距,解决了缺乏对车轮的缓冲限距的问题。
附图说明
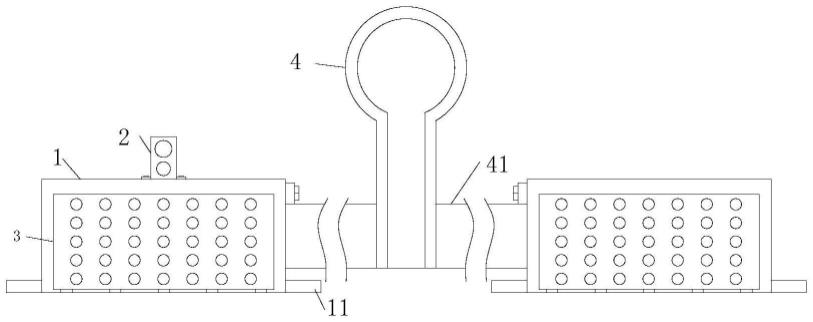
16.图1为本实用新型实施例缓冲限距装置的正视结构示意图。
17.图2为本实用新型实施例缓冲限距装置的俯视局部结构示意图。
18.图3为本实用新型实施例缓冲限距装置的侧视局部结构示意图。
19.图4为本实用新型实施例感应板的俯视剖面结构示意图。
20.1、限距块;11、衔接块;12、后置盒;13、小型控制器;14、散热网孔;2、距离传感器;3、缓冲块;31、支撑面板;32、缓冲板;33、橡胶弧块;34、滚珠;35、滚轮;4、感应板;41、连接板;42、电动推杆;43、防护海绵;5、阻尼缓冲器;51、缓冲弹簧;6、限位柱;61、限位槽块;62、限位槽。
具体实施方式
21.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。
22.图1为本实用新型实施例缓冲限距装置的正视结构示意图、图2为本实用新型实施例缓冲限距装置的俯视局部结构示意图、图3为本实用新型实施例缓冲限距装置的侧视局部结构示意图、图4为本实用新型实施例感应板的俯视剖面结构示意图。
23.参照图1至图4所示,本实用新型提供了一种无人驾驶技术智能停车用缓冲限距装置,包括:距离传感器2、感应板4、阻尼缓冲器5和限位柱6。
24.距离传感器2,位于限距块1上端表面,距离传感器2电线连接有小型控制器13,小型控制器13螺接在限距块1后侧。
25.感应板4,位于距离传感器2右侧,感应板4前端表面黏合有防护海绵43。
26.阻尼缓冲器5,位于限距块1前端凹槽内,阻尼缓冲器5前端通过缓冲弹簧51连接有缓冲块3。
27.限位柱6,位于阻尼缓冲器5左右侧,限位柱6前端焊接在缓冲块3后端表面。
28.材质较硬的挡轮块对车轮造成磨损,加速车轮的损耗,且无人驾驶智能停车时,车身后侧的传感器无法更好感应距离挡轮块的间距,缺乏对车轮的缓冲限距的问题。因此,本实用新型的无人驾驶技术智能停车用缓冲限距装置利用阻尼缓冲器和限位柱,使缓冲块与限距块缓冲连接,便于缓冲、阻挡智能停车时汽车后轮的移动,同时缓冲块表面橡胶弧块的滚珠与车轮相接触,便于减小车轮受到的磨损,延长汽车车轮的使用寿命,通过距离传感器检测车轮后移的距离,控制电动推杆推动感应板向前推动,便于缩短感应板与汽车后侧传
感器之间的距离,便于无人驾驶技术智能控制汽车停止,起到限距的作用,方便车身后侧的传感器更好感应距离限距块的间距,解决了缺乏对车轮的缓冲限距的问题。
29.缓冲块3表面设置有橡胶弧块33,橡胶弧块33后端黏合有缓冲板32,缓冲板32后端黏合有支撑面板31。
30.橡胶弧块33和缓冲板32都具有优良的缓存性能,帮助阻尼缓冲器5缓存部分力度。缓冲块3在车轮的挤压下向后移动,与后侧的限距块1距离减小。
31.橡胶弧块33前端表面滑动连接有滚珠34,支撑面板31下端内部连接有滚轮35,支撑面板31后端中部连接有两组阻尼缓冲器5。
32.滚珠34与车轮表面相接触,减少车轮与橡胶弧块33之间的摩擦力,便于降低车轮受到的磨损,便于延长车轮的使用寿命。滚轮35方便缓冲块3进行移动。
33.限距块1后端焊接有后置盒12;且小型控制器13位于后置盒12内部,后置盒12左右侧壁设置有散热网孔14。
34.小型控制器13根据距离传感器2输送的距离数值,判读是否处于预设的限距范围内,当处于限距范围内,控制电动推杆42向前推动。散热网孔14使后置盒12内部热量散发。
35.限距块1、缓冲块3和感应板4构成缓冲限距装置,感应板4下端后侧连接有两组电动推杆42;且电动推杆42电线连接有小型控制器13。
36.限距块1、缓冲块3进行缓存智能停车的车辆。感应板4在电动推杆42推动下向前移动,方便车身后侧的传感器更好感应距离限距块的间距,便于智能控制汽车停止移动,完成停车过程。
37.电动推杆42前端镶嵌固定有连接板41;且连接板41左右端与限距块1侧壁相螺接,限距块1左右端焊接有衔接块11。
38.感应板4通过连接板41位于左右侧限距块1之间,方便车身后侧的传感器更加容易的感应到感应板4所处位置,方便进行及时停车。
39.限距块1前端凹槽内壁上焊接有限位槽块61,限位槽块61内部设置有限位槽62;且限位槽62内部与限位柱6后端相连接。
40.当缓冲块3相后移动时,缓冲块3挤压限位柱6不断进入限位槽62,同时对阻尼缓冲器5和缓冲弹簧51进行压缩,从而阻尼缓冲器5和缓冲弹簧51进行缓冲缓冲块3的移动。
41.本实用新型的无人驾驶技术智能停车用缓冲限距装置可有效解决缺乏对车轮的缓冲限距的问题,便于缓冲、阻挡智能停车时汽车后轮的移动,方便车身后侧的传感器更好感应距离限距块的间距,适用于无人驾驶技术智能停车用缓冲限距装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1