带轴距调整柔性保护装置的搬运机器人的制作方法
1.本实用新型涉及立体车库领域,尤其涉及一种带轴距调整柔性保护装置的搬运机器人。
背景技术:
2.专利公告文献cn208380209u中公开了一种搬运器,这种搬运器中前后两个报夹组件通过一根拖链(文献中附图标记序号为3)相接,这种搬运器中由于拖链(拖链内部有数据线缆以及电力线缆)是柔性且自身不存在拉伸限位的功能,所以拖链在受到拉扯时容易因为拉伸到极致而发生蹦断,这样容易导致拖链断裂。
技术实现要素:
3.本实用新型针对上述问题,提出了一种带轴距调整柔性保护装置的搬运机器人。
4.本实用新型采取的技术方案如下:
5.一种带轴距调整柔性保护装置的搬运机器人,包括第一搬运组件、第二搬运组件以及拖链,所述拖链的两端分别与第一搬运组件以及第二搬运组件固定在一起,所述拖链内部设置有线缆,还包括钢丝绳缆,所述钢丝绳缆的两端分别与所述第一搬运组件以及第二搬运组件配合在一起,且钢丝绳缆位于拖链内,且钢丝绳缆位于拖链内的长度短于拖链内线缆的长度。
6.本种搬运机器人中,通过在连接第一搬运组件与第二搬运组件的拖链上设置钢丝绳缆,且钢丝绳缆位于拖链内的长度短于线缆(包括数据线缆以及电力线缆)位于拖链内的长度,这样第一搬运组件与第二搬运组件之间的距离增大时,钢丝绳缆在受到拉扯时会率先绷紧,且由于钢丝绳缆在绷紧时不会产生拉伸现象,所以当钢丝绳缆绷紧之后第一搬运组件与第二搬运组件之间的距离无法进一步增大,这样就保证拖链内的线缆不会出现绷紧乃至蹦裂的情况。
7.综上所述,本种搬运机器人中通过在拖链内设置钢丝绳缆,利用钢丝绳缆的刚性对第一搬运组件与第二搬运组件之间的距离起到限定,避免拖链内的线缆发生蹦断。
8.还包括支架、螺牙接头、弹簧以及微动开关,所述第一搬运组件以及第二搬运组件上均安装有所述支架,所述螺牙接头滑动套设于支架上,所述绳缆的两端分别跟两个螺牙接头固定在一起,所述弹簧套设于螺牙接头上,所述弹簧一端直接或间接抵住第一搬运组件或第二搬运组件,弹簧的另一端直接或间接抵住螺牙接头,所述微动开关设置于支架内,所述微动开关用于监测螺牙接头的移动。
9.上述结构中,利用弹簧实现了螺牙接头的弹性安装,螺牙接头可以在支架上移动一定的距离,弹簧的存在可以让螺牙接头在移动之后重新回位至开始移动前的位置,微动开关用于监测螺牙接头是否移动,当钢丝绳缆未绷紧时,钢丝绳缆不会拉动螺牙接头移动,这样当第一搬运组件与第二搬运之间距离增大的过程中,当距离增大至钢丝绳缆绷紧的那一刻,钢丝绳缆会拉动螺牙接头移动,而螺牙接头移动会被微动开关监测到,此时微动开关
监测到钢丝绳缆绷紧的信息可传递给第一搬运组件或者第二搬运组件,使得第一搬运组件或者第二搬运组件停止运动,确保第一搬运组件与第二搬运组件之间的距离不会进一步增大。当第一搬运组件与第二搬运组件相互靠拢(二者之间的距离减小)时,螺牙接头会在弹簧的作用下回弹至开始运动移动前位置。
10.可选的,还包括隔块及螺母,所述隔块与螺母均设置于螺牙接头上,且隔块与螺母分别位于支架的两侧。
11.在螺牙接头上设置隔块与螺母,这样是为了将螺牙接头安装到支架上,且由于隔块与螺母分别位于之间的两侧,这样相当于对螺牙接头在支架上起到了一个限位的作用,使得螺牙接头在支架上滑动时不会滑出支架。同时弹簧套设在螺牙接头上,弹簧的一端抵住第一搬运组件或者第二搬运组件,而弹簧的另一端抵住隔块。
12.可选的,还包括套管,所述第一搬运组件或者第二搬运组件都设置有所述套管,所述螺牙接头部分位于所述套管内。
13.设置套管的作用一则是为了对螺牙接头起到地一定的导向限位作用,避免螺牙接头在移动时发生偏向,二则套管位于弹簧与螺牙接头之间,为了对弹簧与螺牙接头起到一定的分隔作用,避免二者之间的磨损。
14.可选的,所述隔块上设置有斜面,所述微动开关与隔块的斜面接触。可选的,所述第一搬运组件与第二搬运组件的结构及大小均一致。
15.在隔块上设置斜面,利用隔块上的斜面跟微动开关接触,这样可以让隔块在移动触发微动开关的过程中能够缓慢触发微动开关,避免在触发微动开关的过程瞬间撞击微动开关而损伤微动开关。
16.可选的,所述第一搬运组件上设置有激光测距仪,所述第二搬运组件上设置有反射块,所述反射块用于反射激光测距仪发射出的光线。
17.激光测距仪以及反射块的作用是测量第一搬运组件与第二搬运组件之间的距离。
18.可选的,所述第一搬运组件以及第二搬运组件上均设置有电机。
19.本实用新型的有益效果是:通过在拖链内设置钢丝绳缆,利用钢丝绳缆的刚性对第一搬运组件与第二搬运组件之间的距离起到限定,避免拖链内的线缆发生蹦断。
附图说明:
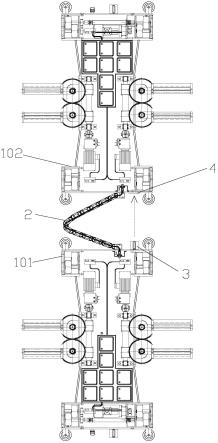
20.图1是带轴距调整柔性保护装置的搬运机器人示意简图;
21.图2是拖链与第一搬运组件及第二搬运组件的配合关系示意图;
22.图3是图2中a处的放大示意简图。
23.图中各附图标记为:101、第一搬运组件;102、第二搬运组件;2、拖链;3、激光测距仪;4、反射块;5、钢丝绳缆;6、螺母;7、隔块;8、弹簧;9、微动开关;10、螺牙接头;11、套管。
具体实施方式:
24.下面结合各附图,对本实用新型做详细描述。
25.如附图1、附图2以及附图3所示,一种带轴距调整柔性保护装置的搬运机器人,包括第一搬运组件101、第二搬运组件102以及拖链2,拖链2的两端分别与第一搬运组件101以及第二搬运组件102固定在一起,拖链2内部设置有线缆,还包括钢丝绳缆5,钢丝绳缆5的两
端分别与第一搬运组件101以及第二搬运组件102配合在一起,且钢丝绳缆5位于拖链2内,且钢丝绳缆5位于拖链2内的长度短于拖链2内线缆的长度。
26.本种搬运机器人中,通过在连接第一搬运组件101与第二搬运组件102的拖链2上设置钢丝绳缆5,且钢丝绳缆5位于拖链2内的长度短于线缆(包括数据线缆以及电力线缆)位于拖链2内的长度,这样第一搬运组件101与第二搬运组件102之间的距离增大时,钢丝绳缆5在受到拉扯时会率先绷紧,且由于钢丝绳缆5在绷紧时不会产生拉伸现象,所以当钢丝绳缆5绷紧之后第一搬运组件101与第二搬运组件102之间的距离无法进一步增大,这样就保证拖链2内的线缆不会出现绷紧乃至蹦裂的情况。
27.综上,本种搬运机器人中通过在拖链2内设置钢丝绳缆5,利用钢丝绳缆5的刚性对第一搬运组件101与第二搬运组件102之间的距离起到限定,避免拖链2内的线缆发生蹦断。
28.还包括支架、螺牙接头10、弹簧8以及微动开关9,第一搬运组件101以及第二搬运组件102上均安装有支架,螺牙接头10滑动套设于支架上,绳缆的两端分别跟两个螺牙接头10固定在一起,弹簧8套设于螺牙接头10上,弹簧8一端直接或间接抵住第一搬运组件101或第二搬运组件102,弹簧8的另一端直接或间接抵住螺牙接头10,微动开关9设置于支架内,微动开关9用于监测螺牙接头10的移动。
29.上述结构中,利用弹簧8实现了螺牙接头10的弹性安装,螺牙接头10可以在支架上移动一定的距离,弹簧8的存在可以让螺牙接头10在移动之后重新回位至开始移动前的位置,微动开关9用于监测螺牙接头10是否移动,当钢丝绳缆5未绷紧时,钢丝绳缆5不会拉动螺牙接头10移动,这样当第一搬运组件101与第二搬运之间距离增大的过程中,当距离增大至钢丝绳缆5绷紧的那一刻,钢丝绳缆5会拉动螺牙接头10移动,而螺牙接头10移动会被微动开关9监测到,此时微动开关9监测到钢丝绳缆5绷紧的信息可传递给第一搬运组件101或者第二搬运组件102,使得第一搬运组件101或者第二搬运组件102停止运动,确保第一搬运组件101与第二搬运组件102之间的距离不会进一步增大。当第一搬运组件101与第二搬运组件102相互靠拢(二者之间的距离减小)时,螺牙接头10会在弹簧8的作用下回弹至开始运动移动前位置。
30.如附图1、附图2以及附图3所示,还包括隔块7及螺母6,隔块7与螺母6均设置于螺牙接头10上,且隔块7与螺母6分别位于支架的两侧。
31.在螺牙接头10上设置隔块7与螺母6,这样是为了将螺牙接头10安装到支架上,且由于隔块7与螺母6分别位于之间的两侧,这样相当于对螺牙接头10在支架上起到了一个限位的作用,使得螺牙接头10在支架上滑动时不会滑出支架。同时弹簧8套设在螺牙接头10上,弹簧8的一端抵住第一搬运组件101或者第二搬运组件102,而弹簧8的另一端抵住隔块7。
32.如附图1、附图2以及附图3所示,还包括套管11,第一搬运组件101或者第二搬运组件102都设置有套管11,螺牙接头10部分位于套管11内。
33.设置套管11的作用一则是为了对螺牙接头10起到地一定的导向限位作用,避免螺牙接头10在移动时发生偏向,二则套管11位于弹簧8与螺牙接头10之间,为了对弹簧8与螺牙接头10起到一定的分隔作用,避免二者之间的磨损。
34.如附图1、附图2以及附图3所示,隔块7上设置有斜面,微动开关9与隔块7的斜面接触。如附图1、附图2以及附图3所示,第一搬运组件101与第二搬运组件102的结构及大小均
一致。
35.在隔块7上设置斜面,利用隔块7上的斜面跟微动开关9接触,这样可以让隔块7在移动触发微动开关9的过程中能够缓慢触发微动开关9,避免在触发微动开关9的过程瞬间撞击微动开关9而损伤微动开关9。
36.如附图1、附图2以及附图3所示,第一搬运组件101上设置有激光测距仪3,第二搬运组件102上设置有反射块4,反射块4用于反射激光测距仪3发射出的光线。
37.激光测距仪3以及反射块4的作用是测量第一搬运组件101与第二搬运组件102之间的距离。
38.第一搬运组件101以及第二搬运组件102上均设置有电机。第一搬运组件101以及第二搬运组件102的移动均由电机来驱动。
39.以上所述仅为本实用新型的优选实施例,并非因此即限制本实用新型的专利保护范围,凡是运用本实用新型说明书内容所作的等效变换,直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1