一种具有吸入流道的泳池清洁机器人的制作方法
本发明涉及泳池清洁设备,具体涉及一种具有吸入流道的泳池清洁机器人。
背景技术:
1、游泳池是用于进行游泳运动的场地。为保证水质,需要定期对游泳池进行清洁和处理以减少游泳池中的垃圾或细菌。泳池清洁机器人是一种用于对游泳池进行清洁的设备,一般分为水上泳池清洁机器人以及水下泳池清洁机器人,其主要结构为在移动机构上搭载清洁机构在水中运动以进行清洁。
2、目前的泳池清洁机器人一般采用吸入式的清洁机构,使用螺旋桨带动水流直接进入机器人内部进行过滤后排出。但在使用过程中发现,由于水流在机器人内部的流动速度慢,水流吸入效率低,导致垃圾清理回收效率不佳。
技术实现思路
1、因此,本发明为了改善相关技术中泳池机器人垃圾清理回收效率不佳的问题,从而提供一种具有吸入流道的泳池清洁机器人。
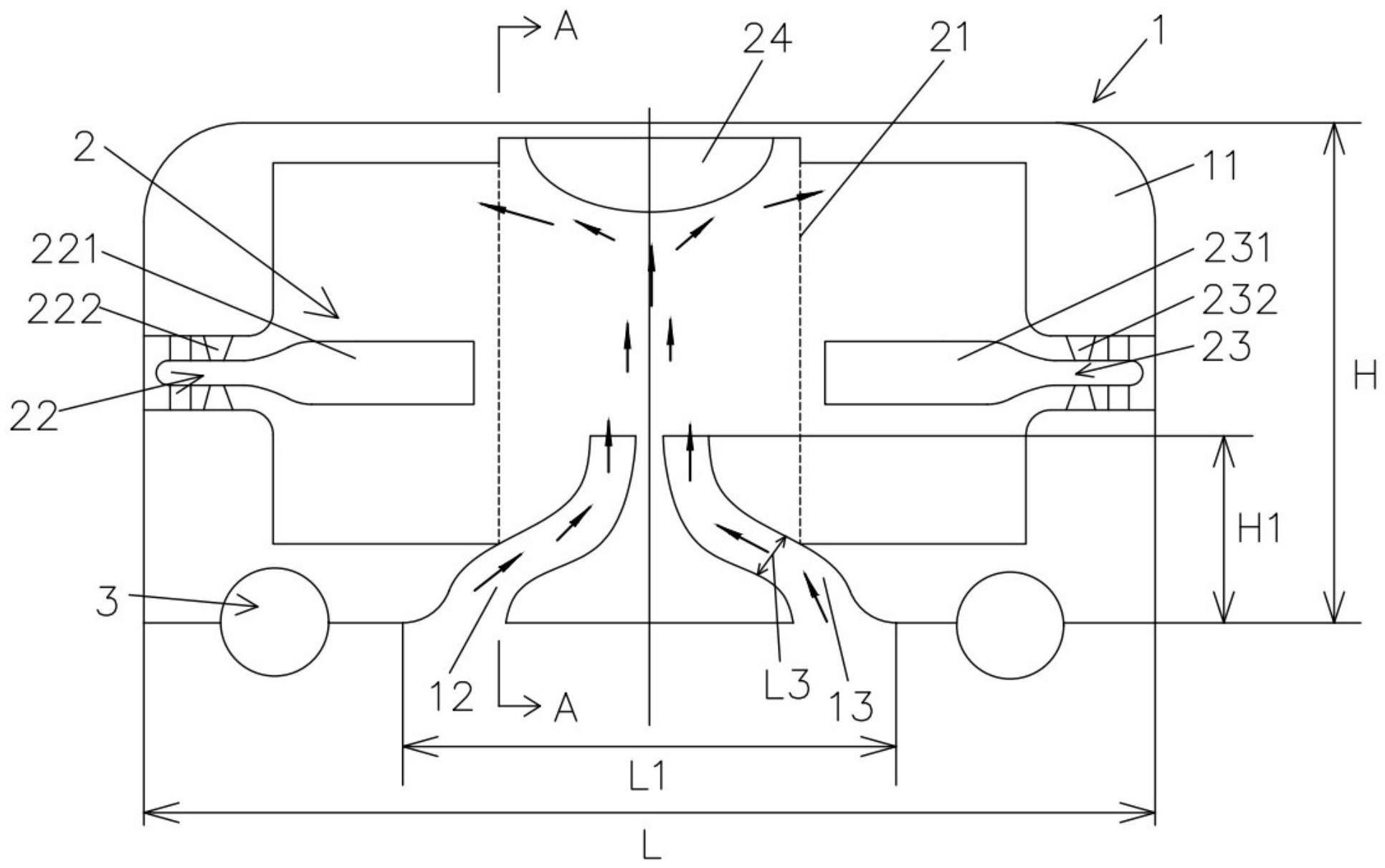
2、一种具有吸入流道的泳池清洁机器人,包括主体、设置于所述主体内的清洁机构以及设置于所述主体下方的移动机构,所述主体包括外壳以及设置于所述外壳内的第一流道以及第二流道,所述外壳具有空腔,所述清洁机构位于所述外壳的空腔中;
3、所述第一流道的一端与外界连通,所述第一流道的另一端与所述外壳的空腔连通,所述第二流道的一端与外界连通,所述第二流道的另一端与所述外壳的空腔连通,所述第一流道的内部等宽,所述第二流道的内部等宽,所述第一流道与所述第二流道关于所述主体的中部对称。
4、进一步的,所述第一流道的入口与所述第二流道的入口相对于所述主体的中部相互远离,所述第一流道的出口与所述第二流道的出口相对于所述主体的中部相互靠近。
5、进一步的,所述第一流道与所述第二流道具有弧度,所述第一流道与所述第二流道均具有第一圆弧段以及第二圆弧段。
6、进一步的,所述主体的总长度为l,所述主体的宽度为w,所述主体的高度为h;
7、所述第一流道入口外边缘至所述第二流道入口外边缘的最大距离为l1,所述l1为0.3l~0.7l;
8、所述第一流道出口外边缘至所述第二流道出口外边缘的最大距离为l2,所述l2为0.06l~0.2l;
9、所述第一流道与第二流道的内部宽度为l3,所述l3为0.02l~0.1l;
10、所述第一流道以及所述第二流道的高度为h1,所述h1为0.1h~0.7h;
11、所述第一流道以及所述第二流道的宽度为w1,所述w1为0.3w~0.8w。
12、进一步的,所述l1=0.5l,所述l2=0.1l,所述l3=0.05l,所述h1=0.4h,所述w1=0.6w。
13、进一步的,所述清洁机构包括设置于所述外壳空腔中部的滤网,所述滤网将所述外壳空腔分为第一区域、第二区域以及收集区域,第一区域中设置有第一清洁组件,第二区域中设置有第二清洁组件,所述第一流道与所述第二流道的出口位于所述收集区域内。
14、进一步的,所述第一清洁组件包括设置于第一区域中的第一电机,所述第一电机的输出轴同轴安装有螺旋桨;所述第二清洁组件包括设置于所述第二区域中的第二电机,所述第二电机的输出轴同轴安装有螺旋桨。
15、进一步的,所述第一清洁组件还包括设置于所述第一电机的第一水泵,所述第二清洁组件还包括设置于所述第二电机的第二水泵。
16、进一步的,所述清洁机构还包括导流罩,所述导流罩位于收集区域的上方,所述第一流道与所述第二流道的出口朝向所述导流罩。
17、进一步的,所述移动机构包括若干与所述主体转动连接的轮子。
18、与现有技术相比,本发明技术方案,具有如下优点:
19、1.本发明的一种具有吸入流道的泳池清洁机器人,通过在外壳中对称设置第一流道以及第二流道,同时第一流道与第二流道的内部等宽并圆弧过渡,当清洁机构运转时,可以使水流按第一流道以及第二流道的轨迹被吸入到泳池清洁机器人体内,相比于相关技术中没有设置第一流道与第二流道的设计,本发明通过增加第一流道以及第二流道的设计,可以有效防止内部产生紊流,从而提高能量使用效率,增加泳池机器人清洁回收工作效率,改善相关技术中泳池机器人垃圾清理回收效率不佳的问题。
20、2.本发明的泳池清洁机器人,将第一流道与第二流道的入口长度、开口长度、宽度以及高度与主体的长度宽度高度结合并设定在合理范围内,能进一步地提高能量使用效率,从而更好地对泳池中的垃圾进行回收清理。
21、3.本发明的泳池清洁机器人,通过设置导流罩与第一流道以及第二流道配合,当水流从第一流道和第二流道的出口进入机器人内部时,水流在导流罩的作用下能有效进行分流,从而均匀地向两侧的第一清洁组件以及第二清洁组件移动,避免垃圾在滤网的一侧聚集导致堵塞。
技术特征:
1.一种具有吸入流道的泳池清洁机器人,其特征在于,包括主体(1)、设置于所述主体(1)内的清洁机构(2)以及设置于所述主体(1)下方的移动机构(3),所述主体(1)包括外壳(11)以及设置于所述外壳(11)内的第一流道(12)以及第二流道(13),所述外壳(11)具有空腔,所述清洁机构(2)位于所述外壳(11)的空腔中;
2.根据权利要求1所述的一种具有吸入流道的泳池清洁机器人,其特征在于,所述第一流道(12)的入口与所述第二流道(13)的入口相对于所述主体(1)的中部相互远离,所述第一流道(12)的出口与所述第二流道(13)的出口相对于所述主体(1)的中部相互靠近。
3.根据权利要求2所述的一种具有吸入流道的泳池清洁机器人,其特征在于,所述第一流道(12)与所述第二流道(13)具有弧度,所述第一流道(12)与所述第二流道(13)均具有第一圆弧段以及第二圆弧段。
4.根据权利要求1-3任一项所述的一种具有吸入流道的泳池清洁机器人,其特征在于,所述主体(1)的总长度为l,所述主体(1)的宽度为w,所述主体(1)的高度为h;
5.根据权利要求4所述的一种具有吸入流道的泳池清洁机器人,其特征在于,所述l1=0.5l,所述l2=0.1l,所述l3=0.05l,所述h1=0.4h,所述w1=0.6w。
6.根据权利要求4所述的一种具有吸入流道的泳池清洁机器人,其特征在于,所述清洁机构(2)包括设置于所述外壳(11)空腔中部的滤网(21),所述滤网(21)将所述外壳(11)空腔分为第一区域、第二区域以及收集区域,第一区域中设置有第一清洁组件(22),第二区域中设置有第二清洁组件(23),所述第一流道(12)与所述第二流道(13)的出口位于所述收集区域内。
7.根据权利要求6所述的一种具有吸入流道的泳池清洁机器人,其特征在于,所述第一清洁组件(22)包括设置于第一区域中的第一电机(221),所述第一电机(221)的输出轴同轴安装有螺旋桨;所述第二清洁组件(23)包括设置于所述第二区域中的第二电机(231),所述第二电机(231)的输出轴同轴安装有螺旋桨。
8.根据权利要求7所述的一种具有吸入流道的泳池清洁机器人,其特征在于,所述第一清洁组件(22)还包括设置于所述第一电机(221)的第一水泵(222),所述第二清洁组件(23)还包括设置于所述第二电机(231)的第二水泵(232)。
9.根据权利要求6所述的一种具有吸入流道的泳池清洁机器人,其特征在于,所述清洁机构(2)还包括导流罩(24),所述导流罩(24)位于收集区域的上方,所述第一流道(12)与所述第二流道(13)的出口朝向所述导流罩(24)。
10.根据权利要求1所述的一种具有吸入流道的泳池清洁机器人,其特征在于,所述移动机构(3)包括若干与所述主体(1)转动连接的轮子。
技术总结
本发明涉及泳池清洁设备技术领域,具体涉及一种具有吸入流道的泳池清洁机器人,其包括主体、设置于主体内的清洁机构以及设置于主体下方的移动机构,主体包括外壳以及设置于外壳内的第一流道以及第二流道,外壳具有空腔,清洁机构位于外壳的空腔中;第一流道的一端与外界连通,第一流道的另一端与外壳的空腔连通,第二流道的一端与外界连通,第二流道的另一端与外壳的空腔连通,第一流道的内部等宽,第二流道的内部等宽,第一流道与第二流道关于主体的中部对称。相比于相关技术中没有设置流道的设计,本发明的能量使用效率更高,从而增加泳池机器人清洁回收工作的效率,改善相关技术中泳池机器人垃圾清理回收效率不佳的问题。
技术研发人员:汪洋,于学良,岳晓锋,叶亮文
受保护的技术使用者:深圳市元鼎智能创新有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!