一种单摆式调谐质量阻尼器及计算方法
本发明属于阻尼器,具体涉及一种单摆式调谐质量阻尼器及计算方法。
背景技术:
1、迅速普及的轨道交通、轻质大跨结构上的人致振动和城市内越来越多的施工行为等带来了不可避免的振动问题,会对邻近建筑本身以及建筑内人群造成不利影响。已有许多实例证明,对建筑物采取减振措施效果良好,如目前使用频繁的调谐质量阻尼器(tmd)。
2、tmd形式多样但内核相似,频率、阻尼和质量是关键参数。单摆式作为tmd的一种,常用在高层建筑如风塔中降低风振影响。传统单摆式tmd主要由摆杆、质量球(块)、阻尼等构件组成。传统的ptmd(被动调谐质量阻尼器)很难做到精细化的调整频率和阻尼,并且很多情况下由于计算结果会与实际情况有一定程度的差异,因此会使ptmd取不到实际最佳频率、阻尼,施工过程繁琐复杂且精度不高,减振效果难以达到极致。由于根据有限元模型或其余算法计算所得的参数可能与实际情况有所差别,且很多情况下tmd无法在工程竣工后再行生产,因此需要一种可以在出厂到达现场进行测试完成后再调整参数的tmd,但传统的单摆式tmd很难做到量化的调整。
技术实现思路
1、为克服现有技术的不足,本发明公开了一种单摆式调谐质量阻尼器及计算方法,本发明致力于现有技术中3个问题的改进,具体如下:
2、1、改进了ptmd的调频方式,设有初调频和后续精确调频以达到最佳减振效果。
3、2、现有自调节频率ptmd的设计中,一般只可调整频率,阻尼由于难以精细化调整在实际工程中常常在合理范围内估计取值。本发明设置下悬装置沉入到阻尼液中,通过下悬装置在阻尼液中的摆动为ptmd提供阻尼,通过改变滑动块与定位块的相对滑动幅度,改变与阻尼液的接触面积,自主精细化的调整阻尼。
4、3、对精确调整ptmd频率的算法进行改进。
5、为实现上述目的,本发明的技术方案是:
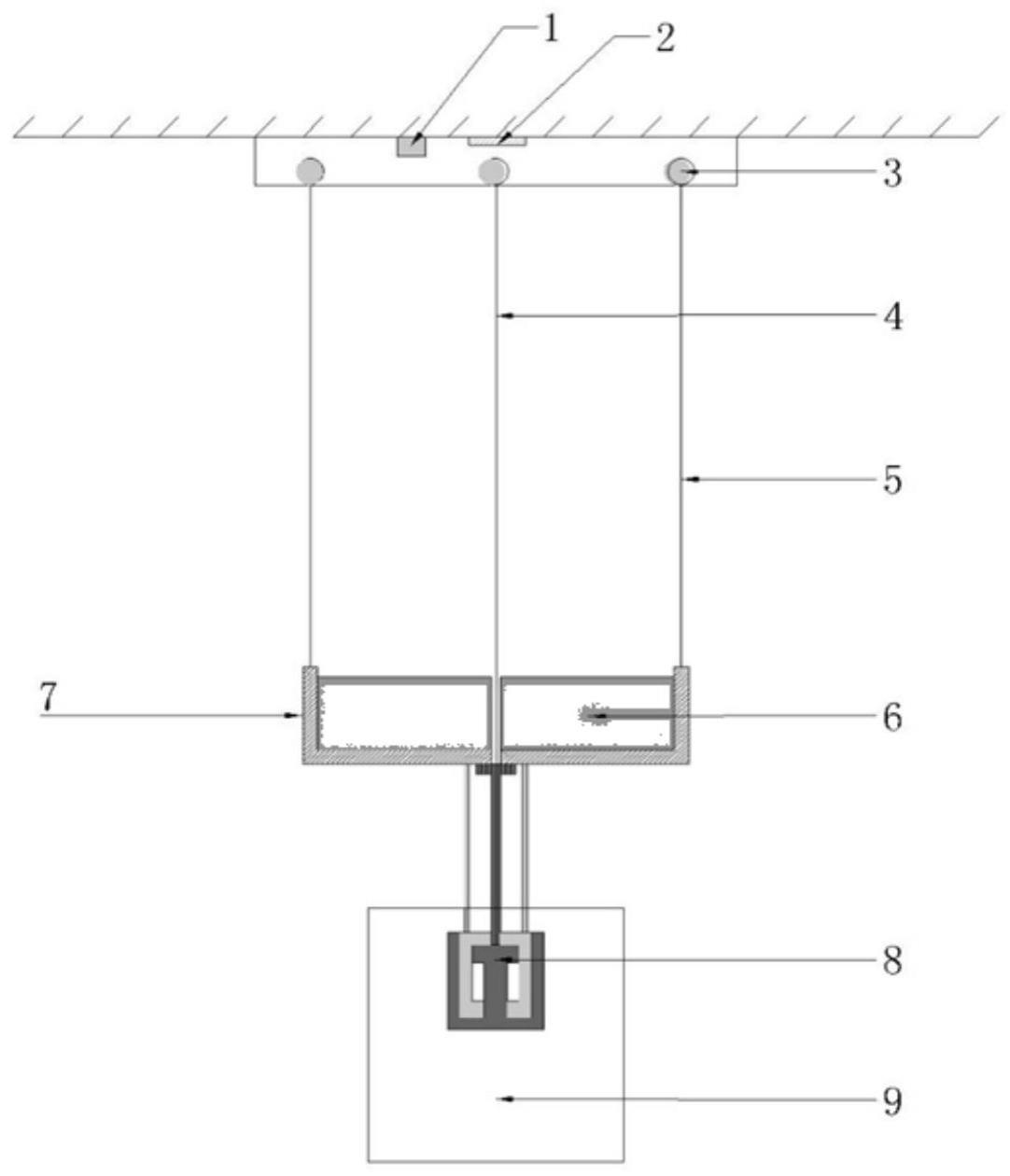
6、一种单摆式调谐质量阻尼器,包括水平向速度传感器、电路板、频率调节机构、阻尼调节机构,所述的水平向速度传感器固定设于待减振结构底部并用于检测结构的固有频率及受到外界激励时的动力响应频率,所述的水平向速度传感器通过导线与电路板信号连接,所述的频率调节机构和阻尼调节机构分别与结构底部连接并相互配合使用,所述的电路板配置为对频率调节机构及阻尼调节机构进行控制。
7、优选的,所述的结构底部固定设有矩形安装框,所述的频率调节机构包括设于矩形安装框四角处的第一伺服电机,所述的第一伺服电机的输出轴固定连接有第一缠绕辊,所述的第一缠绕辊上缠绕有边缘摆绳,所述的矩形安装框下方设有上端敞口的支撑盒,所述的支撑盒内均匀填充有质量块,所述的支撑盒沿水平设置,4个边缘摆绳的底端分别与支撑盒的顶端4个角部连接,所述的电路板通过导线与第一伺服电机电连接,并用以控制质量块的升降高度。
8、优选的,所述的阻尼调节机构包括位于矩形安装框中心处的第二伺服电机,所述的第二伺服电机的输出轴固定连接有第二缠绕辊,所述的第二缠绕辊上缠绕有中央摆绳,所述的中央摆绳沿矩形安装框的轴线向下穿过预设于质量块中心处并贯通支撑盒底端的贯通孔,所述的中央摆绳的底端连接有表面积可调节的下悬装置,所述的下悬装置与阻尼液连接,所述的阻尼液置于容器内,所述的容器与地面或建筑结构的墙体固定连接,所述的电路板通过导线与第二伺服电机电连接。
9、优选的,所述的下悬装置包括定位块、多节管式伸缩杆、滑动块,所述的定位块内设有空腔,定位块的轴线处且位于空腔的顶端和底端分别设有第一滑孔和第二滑孔,所述的滑动块上端敞口并包覆于定位块外周,滑动块的底端设有向上延伸并贯穿第二滑孔的滑竿,所述的滑竿顶端固定连接有限位块,所述的限位块与空腔的内壁滑动连接,所述的多节管式伸缩杆最下一节杆体的外表面与第一滑孔内表面密封滑动连接,所述的滑竿与第二滑孔密封滑动连接,所述的滑动块的内表面与定位块的外表面密封滑动连接,所述的中央摆绳沿贯通孔穿过多节管式伸缩杆并与限位块顶端连接,所述的多节管式伸缩杆最下一节杆体的底端与限位块顶端固定连接,所述的多节管式伸缩杆的顶端与支撑盒的底端固定连接,所述的多节管式伸缩杆与贯通孔同轴。
10、优选的,所述的定位块及滑动块均为立方体结构,所述的多节管式伸缩杆外周还沿垂向设有4根边缘限位杆,所述的边缘限位杆上端与支撑盒底端固定连接,下端与定位块顶端的角部固定连接。
11、优选的,所述的电路板设有计算模块,所述的计算模块针对水平向速度传感器的采集数据,通过傅里叶变换计算结构的固有频率及动力响应频率,所述的电路板通过控制第一伺服电机的转动实现质量块的升降以调节阻尼器的振动频率,通过控制滑动块的升降实现滑动块与定位块的相对滑动,所述的滑动块和定位块均浸泡在阻尼液中,通过相对滑动实现与阻尼液的接触面积大小的调节,所述的电路板根据水平向速度传感器实时测量的数据调整摆中央绳及边缘摆绳的长度,通过计算模块得到计算阻尼和频率后,因传感器灵敏度不足致使离散型时域数据经傅里叶变换后有一定误差,此时,所述的电路板通过精准自调频算法对频率误差进行微调。
12、一种单摆式调谐质量阻尼器的精准自调频算法,包括如下步骤:
13、(1)初调频:给待减振结构施加一个稳态持续性激励或直接在环境激励下,连接在结构上的水平向速度传感器采集一定时长内的振动数据,电路板初算结构固有频率及动力响应频率,并控制第一伺服电机调整边缘摆绳长度;
14、(2)后续微调频率:在算法过程中,第一伺服电机先伸长边缘摆绳,若水平向速度传感器的测试速度呈现减小趋势则证明摆绳调整方向正确,电路板记录每一次调整时摆绳长度以及速度数值,直至速度由减小趋势变为增大趋势时停止摆绳长度的调整,输出记录极值对应摆绳长度;若第一伺服电机先伸长摆绳时,速度呈现增大趋势,则缩短摆绳长度,再重复上述步骤即可。
15、优选的,所述的步骤(1)包括如下具体步骤:
16、计算结构固有频率如式(1)所示,将所得振动时域数据转换为频域数据,得到信号的频谱密度函数,既可得结构固有频率:
17、
18、式中:
19、x(t)为时域数据,在本发明中专指速度;
20、x(ω)为频域数据;
21、ω为频率;
22、t为时间;
23、j为虚数;
24、由于传感器所测为离散型时域数据,因此,计算所得只能为有限个数频率对应的幅值密度,即为离散型傅里叶变换(dft),有限长离散信号x(n),(n=0,1,2……,n-1)的dft定义如式(2)所示:
25、
26、式中:k=0,1,2……,n-1;
27、将x(k)分为n为偶数和n为奇数两部分,x1为偶数,x2为奇数,如式(3)所示;
28、x(n)=x1(n)+x2(n) (3)
29、则式(2)变为:
30、
31、由于则式(4)变为:
32、
33、由于式(5)中偶数序列与奇数序列均以为周期,则因此,式(5)表示为:
34、
35、式(2)-式(6)中,k均为相同取值,k=0,1,2……,n-1.即,只需得到x(k)则必然可以得到将所测时域数据转换成频域后,可得结构固有频率,第一伺服电机根据计算结果调整边缘摆绳长度完成初调频。
36、本发明一种单摆式调谐质量阻尼器及计算方法的有益效果为:
37、本发明提出了一种可以自调节频率、阻尼的单摆式调谐质量阻尼器。本发明的ptmd内置反馈调节系统(电路板、水平向速度传感器、第一伺服电机、第二伺服电机)和经典ptmd构造,其中电路板根据结构固有频率控制伺服电机改变摆绳长度,将阻尼和频率调整至理论计算结果,再经由反馈调节系统进行精准自调频达到最佳减振效果。针对传统ptmd只能粗估阻尼的计算方式对结构进行了改进,使ptmd可以精确调整阻尼。对反馈控制系统精确自调节频率的算法进行了优化,相较于传统ptmd更精确、简洁、易于推广。
- 还没有人留言评论。精彩留言会获得点赞!