用于混凝土加气板材网片的对卡扣安装装置和方法与流程
本发明涉及一种对卡扣安装装置和方法,尤其是一种用于混凝土加气板材网片的对卡扣安装装置和方法。
背景技术:
1、混凝土加气板材是以硅质材料(砂、粉煤灰及含硅尾矿等)和钙质材料(石灰、水泥)为主要原料,掺加发气剂(铝粉),通过配料、搅拌、浇注、预养、切割、蒸压、养护等工艺过程制成的轻质多孔硅酸盐制品,因其经发气后含有大量均匀而细小的气孔,故名混凝土加气板材,为了保证混凝土加气板材的强度,需要在混凝土加气板材装入至少两个网片,在网片之间需要安装卡扣,因此用于混凝土加气板材网片的对卡扣安装装置是一种重要的建筑材料用装置,在现有的用于混凝土加气板材网片的对卡扣安装装置中,还都是人工把卡扣安装在钎杆架上,从而影响了对卡扣的安装效率,
2、本技术人申请的上一件关于发明《预制板骨架及其安装成型装置、方法》,技术方案是针对在单个芯轴上进行安装卡扣,不适合在钎杆架上同时安装多个卡扣,
3、本发明通过对位于钎架上的多根钎杆与需要安装的卡扣进行同步连接的技术特征,对都是人工把卡扣安装在钎杆架上从而影响了对卡扣的安装效率的技术问题进行了在技术层面上进行有效的探索研究,
4、这里的陈述仅提供与本发明相关的背景技术,而不必然地构成现有技术,基于申请人于2023年6月15日提供的具有工作过程中解决实际技术问题的技术交底书、通过检索得到相近的专利文献和背景技术中现有的技术问题、技术特征和技术效果,做出本发明的申请技术方案。
技术实现思路
1、本发明的客体是一种用于混凝土加气板材网片的对卡扣安装装置,
2、本发明的客体是一种用于混凝土加气板材网片的对卡扣安装方法。
3、为了克服上述技术缺点,本发明的目的是提供一种用于混凝土加气板材网片的对卡扣安装装置和方法,因此提高了钎杆架与多组上下卡扣的安装效率。
4、为达到上述目的,本发明采取的技术方案是:一种用于混凝土加气板材网片的对卡扣安装装置,包含有具有钎杆架下压模和卡扣支撑模的按压组合装置、设置为与钎杆架下压模相对应分布的钎架转位串联机器人、设置为与多组上下卡扣支撑模相对应分布的并联机器人及卡扣抓手。
5、由于设计了按压组合装置、钎架转位串联机器人和并联机器人及卡扣抓手,通过并联机器人及卡扣抓手,实现了把卡扣布料在卡扣支撑模上,通过钎架转位串联机器人,实现了把钎杆架放置在钎杆架下压模和卡扣支撑模之间,通过按压组合装置,实现了把位于钎架上的多根钎杆移位到卡扣的中间开口凹槽体中,实现了对位于钎架上的多根钎杆与需要安装的卡扣进行同步连接,解决了对都是人工把卡扣安装在钎杆架上从而影响了对卡扣的安装效率的技术问题,因此提高了钎杆架与多组上下卡扣的安装效率。
6、本发明设计了,按照对位于钎架上的多根钎杆与需要安装的卡扣进行同步连接的方式把按压组合装置、钎架转位串联机器人和并联机器人及卡扣抓手相互联接。
7、本发明设计了,按照把位于钎架上的多根钎杆移位到卡扣的中间开口凹槽体中的方式把按压组合装置与钎架转位串联机器人和并联机器人及卡扣抓手联接。
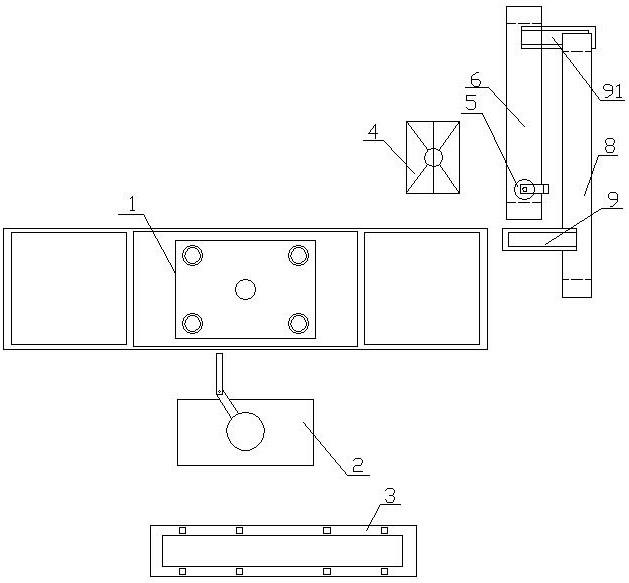
8、本发明设计了,按压组合装置设置为还包含有底座部、立柱部、移动座部、动力伸缩缸部、内支架部和位移丝杠部。
9、以上四个技术方案的技术效果在于:实现了通过使钎杆架向卡扣进行运动把位于钎架上的多根钎杆与多组上下卡扣连接在一起,实现了由下压作用力使钎杆架进行运动。
10、本发明设计了,还包含有第一附件装置并且第一附件装置设置在并联机器人及卡扣抓手上,第一附件装置设置为视觉识别器。
11、本发明设计了,还包含有第二附件装置并且第二附件装置设置在钎架转位串联机器人上,第一附件装置设置为钎梁架。
12、本发明设计了,还包含有第三附件装置并且第三附件装置设置在并联机器人及卡扣抓手上,第三附件装置设置为上料输送机。
13、本发明设计了,还包含有第四附件装置并且第四附件装置设置在第三附件装置上,第四附件装置设置为包含有回料输送机、第一导料斗和第二导料斗。
14、本发明设计了,还包含有第五附件装置并且第五附件装置设置在按压组合装置上,第五附件装置设置为包含有光束发射器和光接收传感器。
15、本发明设计了,还包含有第六附件装置并且第六附件装置设置在第三附件装置上,第六附件装置设置为卡扣理料机。
16、以上六个技术方案的技术效果在于:实现了其它技术特征的集成安装,扩展了本发明的技术效果。
17、本发明设计了,钎架转位串联机器人和并联机器人及卡扣抓手分别设置为与按压组合装置相对应分布,钎梁架设置为与钎架转位串联机器人相对应分布并且上料输送机设置为与多组上下并联机器人及卡扣抓手相对应分布,在上料输送机与多组上下并联机器人及卡扣抓手之间设置有视觉识别器并且在回料输送机与上料输送机之间设置有第一导料斗并且在回料输送机与上料输送机之间设置有第二导料斗。
18、以上技术方案的技术效果在于:通过按压组合装置、钎架转位串联机器人、钎梁架、并联机器人及卡扣抓手、视觉识别器、上料输送机、回料输送机、第一导料斗和第二导料斗,组成了本发明的基础技术方案,解决了本发明的技术问题。
19、本发明设计了,底座部的上端端面中间部设置为与立柱部的下端端面部联接,立柱部设置为与移动座部的角部贯串式联接并且动力伸缩缸部的外壳体设置为通过连接杆设置为与立柱部的上端头联接,动力伸缩缸部的伸缩端头设置为与移动座部的上端端面中间部联接并且钎杆架下压模设置为与移动座部联接,内支架部的下横部设置为通过螺栓螺母与底座部联接并且内支架部的上横部设置为与多组上下卡扣支撑模的下端端面部接触式联接,位移丝杠部的其中一个端头设置为与内支架部的竖部联接并且位移丝杠部的其中另一个端头设置为与多组上下卡扣支撑模的外侧面部联接,卡扣支撑模设置为与钎杆架下压模相对应分布并且钎杆架下压模设置为与多组上下并联机器人及卡扣抓手相对应分布,卡扣支撑模设置为与钎架转位串联机器人相对应分布。
20、本发明设计了,底座部设置为块状体并且立柱部设置为圆形棒状体,移动座部设置为具有圆形孔体的块状体并且位于移动座部的角部圆形孔体设置为与立柱部联接,位于移动座部的中间部圆形孔体设置为与钎杆架下压模联接并且动力伸缩缸部设置为气动伸缩缸,位移丝杠部设置为滚珠丝杠电动推杆并且四个立柱部设置在移动座部和底座部之间。
21、以上两个技术方案的技术效果在于:实现了压制作用力产生位于钎架上的多根钎杆与多组上下卡扣的结合力,保证了钎杆与多组上下卡扣的连接位置处于精确到位。
22、本发明设计了,内支架部设置为包含有架部和中间横板部并且中间横板部的端头分别设置为与架部的竖部内端端面部联接,架部的横部设置为通过螺栓螺母与底座部联接并且架部的竖部内端端面部设置为与位移丝杠部联接,中间横板部的上端端面侧部设置为与多组上下卡扣支撑模接触式联接,架部设置为匚字形板状体并且中间横板部设置为片状体。
23、以上技术方案的技术效果在于:实现了对多个卡扣支撑模进行同一个平面支撑。
24、本发明设计了,内支架部设置为包含有架部、第一上侧横板部、第二上侧横板部、第一下侧横板部和第二下侧横板部并且架部的其中一个竖部内端端面上部设置为与第一上侧横板部的内端头联接,架部的其中一个竖部内端端面下部设置为与第一下侧横板部的内端头联接并且架部的其中另一个竖部内端端面上部设置为与第二上侧横板部的内端头联接,架部的其中另一个竖部内端端面下部设置为与第二下侧横板部的内端头联接并且第一上侧横板部的上端端面部和第一下侧横板部的上端端面部分别设置为与多组上下卡扣支撑模接触式联接,架部的其中一个竖部内端端面部设置为与位移丝杠部联接联接,第一上侧横板部、第二上侧横板部、第一下侧横板部和第二下侧横板部分别设置为片状体。
25、以上技术方案的技术效果在于:实现了对卡扣支撑模进行上下台阶式平面支撑。
26、本发明设计了,钎杆架下压模设置为包含有板部、中间条部、第一侧条部、第二侧条部、回位弹簧、贯串螺杆部、压紧螺母部和贯串杆部并且板部的下端端面部设置为与中间条部的内端端面部联接,板部分别设置为与贯串杆部的竖部套装式联接并且贯串杆部的横部设置为与板部的上端端面部接触式联接,贯串杆部的竖部设置为与回位弹簧贯穿式联接并且贯串杆部的竖部的端头分别设置为与第一侧条部的上端端面侧部和第二侧条部的上端端面侧部联接,回位弹簧的其中一个端头设置为与板部的下端端面部接触式联接并且回位弹簧的其中另一个端头分别设置为与第一侧条部的上端端面部和第二侧条部的上端端面部接触式联接,板部的上端端面部设置为与贯串螺杆部的内端头联接并且贯串螺杆部设置为与压紧螺母部螺纹式联接,板部的上端端面部设置为与移动座部的下端端面部接触式联接并且压紧螺母部设置为与移动座部的上端端面部接触式联接,贯串螺杆部设置为与移动座部贯穿式联接并且板部设置为具有通孔体的片状体,中间条部设置为下端端面部具有弧形凹槽体的块状体并且第一侧条部和第二侧条部分别设置为块状体,回位弹簧设置为柱式弹簧并且贯串螺杆部设置为光柱螺栓,压紧螺母部设置为六角螺母并且贯串杆部设置为t字形棒状体,贯串杆部的杆部设置为与板部的通孔体联接并且贯串杆部的盘部设置为与板部接触式联接。
27、以上技术方案的技术效果在于:实现了对卡扣进行预先两侧下压,实现了对位于钎架上的多根钎杆进行精确下压,实现了产生分散的三点作用力。
28、本发明设计了,卡扣支撑模设置为包含有移动座部、第一夹持条部、第二夹持条部、支撑块部和顶紧螺栓部并且移动座部的上端端面侧面分别设置为与第一夹持条部的下端端面部和第二夹持条部的下端端面部联接,第一夹持条部和第二夹持条部分别设置为与支撑块部夹持式联接并且第一夹持条部的内侧面部和第二夹持条部的内侧面部分别设置为与支撑块部的侧面部接触式联接,顶紧螺栓部设置为与支撑块部螺纹式联接并且顶紧螺栓部的内端头和支撑块部的下端端面部分别设置为与移动座部的上端端面部接触式联接,移动座部的下端端面部设置为与内支架部接触式联接并且移动座部的内端端面部设置为与位移丝杠部联接,移动座部设置为凹字形块状体并且第一夹持条部和第二夹持条部设置为条状体,支撑块部设置为上端端面中间部具有平面体、侧面部具有斜面的条状体并且在移动座部的平面体设置有弧形凹槽体,在弧形凹槽体的外端部设置有封堵板部并且顶紧螺栓部设置为内六角螺栓。
29、以上技术方案的技术效果在于:实现了对卡扣的可调位置的放置,实现了对卡扣的中间部进行容纳支撑,保证了卡扣的稳定性能。
30、本发明设计了,钎架转位串联机器人设置为关节型搬运机器人并且钎架转位串联机器人设置在按压组合装置和钎梁架之间。
31、以上技术方案的技术效果在于:实现了对钎杆架的搬运和定位放置。
32、本发明设计了,并联机器人及卡扣抓手设置为四轴并联机械人并且并联机器人及卡扣抓手设置在按压组合装置和上料输送机之间,并联机器人及卡扣抓手的信号输入接口设置为与视觉识别器联接联接。
33、以上技术方案的技术效果在于:实现了对卡扣的搬运和定位放置。
34、本发明设计了,视觉识别器设置为基恩士定位视觉系统并且视觉识别器的壳体设置为通过连接杆与上料输送机联接,视觉识别器的视觉头设置为与上料输送机相对应分布并且视觉识别器的输出接口设置为与多组上下并联机器人及卡扣抓手联接。
35、以上技术方案的技术效果在于:实现了对卡扣的位置信号进行拾取。
36、本发明设计了,钎梁架设置为具有支腿的口字形架状体并且钎梁架设置为与钎架转位串联机器人相对应分布。
37、以上技术方案的技术效果在于:实现了对钎杆架进行暂时储存放置。
38、本发明设计了,上料输送机设置为具有挡板皮带式输送机并且上料输送机设置为与多组上下并联机器人及卡扣抓手相对应分布,上料输送机的输入段部设置为与第二导料斗相对应分布并且上料输送机的输出段部分别设置为与视觉识别器和第一导料斗相对应分布。
39、以上技术方案的技术效果在于:实现了对并联机器人及卡扣抓手进行连续的卡扣的输送,提高了对并联机器人及卡扣抓手的工作效率。
40、本发明设计了,回料输送机设置为皮带输送机并且回料输送机的输入段部设置为与第一导料斗联接,回料输送机的输出段部设置为与第二导料斗联接。
41、本发明设计了,第一导料斗和第二导料斗设置为匚字形板状体并且第一导料斗的内端部和第二导料斗的内端部分别设置为与回料输送机联接,第一导料斗的外端部设置为与上料输送机联接并且第二导料斗的外端部设置为与上料输送机联接。
42、以上两个技术方案的技术效果在于:实现了对漏拾取的卡扣再输送到上料输送机上。
43、本发明设计了,按压组合装置与钎架转位串联机器人、并联机器人及卡扣抓手和视觉识别器设置为按照对位下压连接的方式分布并且按压组合装置、钎架转位串联机器人、并联机器人及卡扣抓手和视觉识别器与钎梁架设置为按照外置架支撑的方式分布,按压组合装置、钎架转位串联机器人、并联机器人及卡扣抓手和视觉识别器与上料输送机、回料输送机、第一导料斗和第二导料斗设置为按照外置卡扣上料的方式分布。
44、本发明设计了,移动座部设置为与中间横板部联接,一个中间条部、一个第一侧条部、一个第二侧条部、四个回位弹簧和四个贯串杆部设置为组成一组压板部件,多组压板部件设置为沿板部的横向中心线间隔排列分布,两个贯串螺杆部和两个压紧螺母部设置在板部与移动座部之间,一个第一夹持条部、一个第二夹持条部、多个支撑块部和多个顶紧螺栓部设置为组成一组座支撑部件,两组座支撑部件设置在移动座部上。
45、本发明设计了,在板部上设置有光束发射器并且在移动座部上设置有光接收传感器,光接收传感器的输出接口部设置为通过plc控制器与位移丝杠部的控制接口联接。
46、以上技术方案的技术效果在于:实现了位于钎架上的多根钎杆和卡扣的位置进行精确对正,保证了位于钎架上的多根钎杆与多组上下卡扣的安装精度。
47、本发明设计了,卡扣理料机设置在上料输送机和第二导料斗之间,卡扣理料机设置为具有卡扣振动、旋转、结构筛选和分离系统的理料机并且卡扣理料机的壳体设置为通过连接杆与上料输送机联接,卡扣理料机的输出端口部设置为与上料输送机联接并且卡扣理料机的输入端口部设置为与第二导料斗联接,卡扣理料机设置为呈上下衔接排列分布,相邻的其中一个卡扣理料机的输出端口部设置为与相邻的其中另一个卡扣理料机的输入端口部。
48、以上技术方案的技术效果在于:保证了卡扣的c字形凹槽体的开口处于上置状态。
49、本发明设计了,一种用于混凝土加气板材网片的对卡扣安装方法,其步骤是:由并联机器人及卡扣抓手实现了把卡扣布料在卡扣支撑模上,由钎架转位串联机器人实现了把钎杆架放置在钎杆架下压模和卡扣支撑模之间,由按压组合装置实现了把位于钎架上的多根钎杆移位到卡扣的中间开口凹槽体中,实现了对位于钎架上的多根钎杆与需要安装的卡扣进行同步连接。
50、以上技术方案的技术效果在于:凸显了对位于钎架上的多根钎杆与需要安装的卡扣进行同步连接的技术特征,引入了在用于混凝土加气板材网片的对卡扣安装方法的技术领域中应用。
51、本发明设计了,其步骤是:当把卡扣与位于钎架上的多根钎杆进行连接时,按照钎架上的多根钎杆位置,使支撑块部在第一夹持条部和第二夹持条部之间移动,使顶紧螺栓部在支撑块部上进行转动,使顶紧螺栓部的内端头作用在移动座部的上端端面部上,使支撑块部的位置与位于钎架上的多根钎杆相对应,选取与位于钎架上的多根钎杆相对应的钎杆架下压模,使钎杆架下压模的中间条部的位置与位于钎架上的多根钎杆相对应,使动力伸缩缸部、位移丝杠部、钎架转位串联机器人、并联机器人及卡扣抓手、视觉识别器、上料输送机和回料输送机处于工作状态,通过上料输送机,当卡扣位于上料输送机的输出段部上,通过视觉识别器,把卡扣的位置信号输送到并联机器人及卡扣抓手,由并联机器人及卡扣抓手抓取位于位于上料输送机的输出段部上的卡扣,通过并联机器人及卡扣抓手把抓取的卡扣放到弧形凹槽体中,使卡扣的外端面部与封堵板部接触,从而把卡扣安装在支撑块部上,当在卡扣支撑模上布满卡扣后,通过位移丝杠部,使移动座部在中间横板部上向内移动,把移动座部放到板部的下部,钎架转位串联机器人从钎梁架上抓取钎杆架,通过钎架转位串联机器人,把钎杆架放到板部与移动座部之间,使位于钎架上的多根钎杆与多组上下卡扣的中间开口凹槽体的开口对齐,使动力伸缩缸部处于伸长状态,带动底座部进行向下移动,使板部向下移动,由第一侧条部和第二侧条部分别作用在卡扣的两侧面部,使卡扣的中间开口凹槽体的开口增大,使中间条部的弧形凹槽体作用在位于钎架上的多根钎杆上,把位于钎架上的多根钎杆同步压入到上下卡扣的中间开口凹槽体中,使动力伸缩缸部处于收缩状态,带动底座部进行向上移动,使板部向上移动,通过位移丝杠部,使移动座部在中间横板部上向外移动,通过钎架转位串联机器人,把钎杆架从板部与移动座部之间取出,把钎杆架再放到钎梁架上,从而完成对位于钎架上的多根钎杆与多组上下卡扣的安装,未被并联机器人及卡扣抓手抓取卡扣下落到第一导料斗中,在第一导料斗中滑落到回料输送机上,通过回料输送机,把未被并联机器人及卡扣抓手抓取卡扣下落到第二导料斗中,在第二导料斗中滑落到上料输送机中,当完成把卡扣与位于钎架上的多根钎杆的连接后,使动力伸缩缸部、位移丝杠部、钎架转位串联机器人、并联机器人及卡扣抓手、视觉识别器、上料输送机和回料输送机处于非工作状态。
52、本发明设计了,其步骤是:通过位移丝杠部,使位于第一上侧横板部上的移动座部向内移动,把位于第一上侧横板部上的移动座部放到第一上侧横板部和第二上侧横板部之间,从而把位于第一上侧横板部上的移动座部放到板部的下部,使位于第一上侧横板部上的移动座部向外移动,把位于第一上侧横板部上的移动座部放到第一上侧横板部上,从而把位于第一上侧横板部上的移动座部与板部分开,通过位移丝杠部,使位于第一下侧横板部上的移动座部向内移动,把位于第一下侧横板部上的移动座部放到第一下侧横板部和第二下侧横板部之间,从而把位于第一下侧横板部上的移动座部放到板部的下部,使位于第一下侧横板部上的移动座部向外移动,把位于第一下侧横板部上的移动座部放到第一下侧横板部上,从而把位于第一下侧横板部上的移动座部与板部分开。
53、本发明设计了,其步骤是:当移动座部向内移动时,位于移动座部上的光接收传感器接收到位于板部上的光束发射器发出的光束信号,通过plc控制器,对位移丝杠部的工作状态进行控制,实现对移动座部与板部之间位置的精确对齐。
54、本发明设计了,其步骤是:把卡扣放到卡扣理料机的输入端口部中,卡扣从卡扣理料机的输出端口部输送放到上料输送机的挡板上,使卡扣的中间开口凹槽体的开口处于朝上位置放置到上料输送机上。
55、以上四个技术方案的技术效果在于:实现了位于钎架上的多根钎杆与多组上下卡扣之间安装操作,满足了在钎杆架上同时连接卡扣的要求。
56、在本技术方案中,按压组合装置、钎架转位串联机器人和并联机器人及卡扣抓手是基础部件,也是本发明的必要技术特征,钎梁架、视觉识别器、上料输送机、回料输送机、第一导料斗和第二导料斗是功能部件,是实现本发明的其它技术效果的特征,底座部、立柱部、移动座部、动力伸缩缸部、钎杆架下压模、内支架部、位移丝杠部、卡扣支撑模、架部、中间横板部、第一上侧横板部、第二上侧横板部、第一下侧横板部、第二下侧横板部、板部、中间条部、第一侧条部、第二侧条部、回位弹簧、贯串螺杆部、压紧螺母部、贯串杆部、移动座部、第一夹持条部、第二夹持条部、支撑块部、顶紧螺栓部、封堵板部和弧形凹槽体这些技术特征的设计,是符合专利法及其实施细则的技术特征。
57、在本技术方案中,混凝土加气板材设置为alc混凝土加气板材或aacc混凝土加气板材,卡扣设置为中间部具有c字形凹槽体、端头具有u字形开口体的卡子。
58、在本技术方案中,对位于钎架上的多根钎杆与需要安装的卡扣进行同步连接的按压组合装置、钎架转位串联机器人和并联机器人及卡扣抓手为重要技术特征,在用于混凝土加气板材网片的对卡扣安装装置和方法的技术领域中,具有新颖性、创造性和实用性,在本技术方案中的术语都是可以用本技术领域中的专利文献进行解释和理解。
- 还没有人留言评论。精彩留言会获得点赞!