具有柔性索系约束边界的悬臂梁结构
本发明涉及的是一种振动控制领域的技术,具体是一种具有柔性索系约束边界的悬臂梁结构。
背景技术:
1、悬臂梁具有结构简单、参数稳定、加工与安装工艺简便等优点,在压电振动控制领域常常作为压电材料的基材使用。然而这类结构由于边界条件的约束,即一端固支一端自由,通常难以与其他结构连接并传递力。当采用螺栓等传统的刚性连接时,悬臂梁的自由端上下两端面因受到固定约束,导致边界条件改变,难以屈曲产生挠度;当采用折叠梁柔性连接时,折叠梁能够满足其自由边界的要求,但易引发结构不稳定等问题,并且在力的传递过程中,因其刚度较低,造成能量的损失较大、传递效率较低。
技术实现思路
1、本发明针对现有无法承载质量、无法传递力以及无法实现主被动一体的隔振作用的不足,提出一种具有柔性索系约束边界的悬臂梁结构,能够传递力并且满足悬臂梁边界约束。
2、本发明是通过以下技术方案实现的:
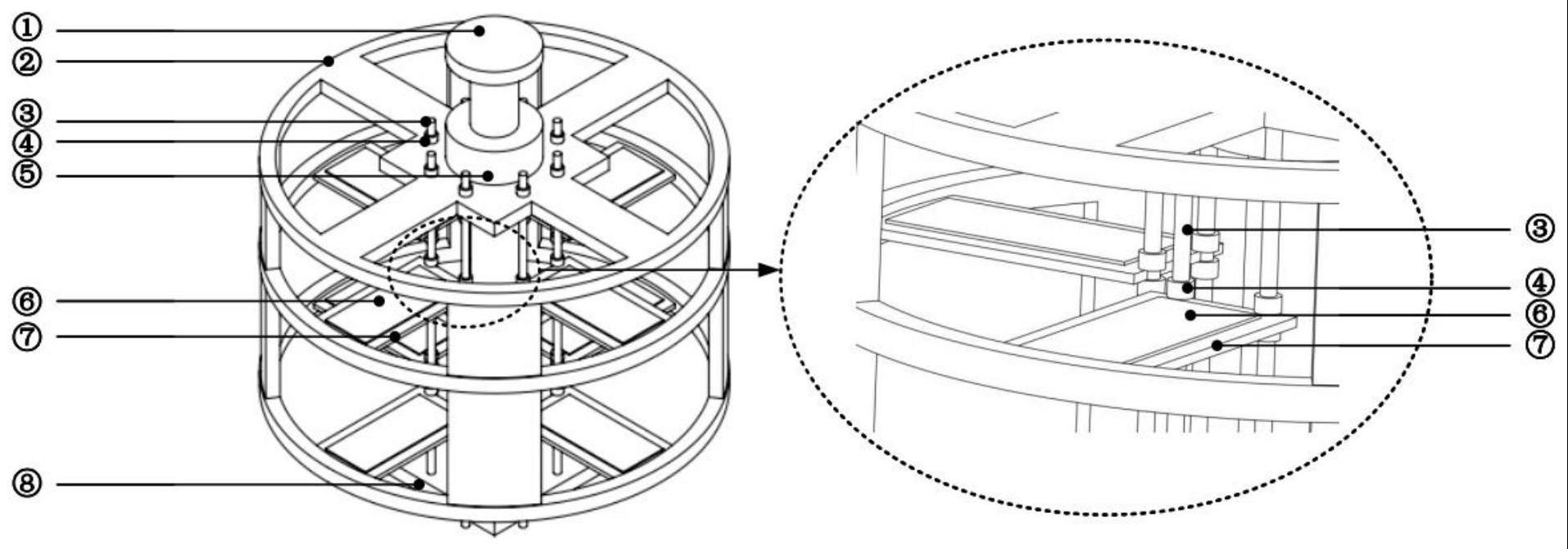
3、本发明涉及一种柔性索系约束边界的悬臂梁结构,包括:外框架、设置于外框架内的若干柔性钢索以及悬臂梁,其中:每根悬臂梁的一端与外框架固定连接,另一端与柔性钢索相连,柔性钢索的两端分别与位于外框架顶部的中心轴和底部的钢索保持架相连。
4、所述的悬臂梁的上下侧面均粘贴有压电陶瓷纤维片(mfc),当向压电陶瓷纤维片施加电压时悬臂梁发生屈曲产生挠度并通过柔性钢索向中心轴传递力。
5、所述的外框架为圆环结构,对应柔性钢索以中心轴为中心对称设置,悬臂梁为半径方向中心对称且多层设置形成索系结构
6、所述的悬臂梁与柔性钢索之间通过铝套压制连接,具体为:悬臂梁的末端设有穿丝孔,柔性钢索穿过穿丝孔并在穿丝孔上方和下方通过铝套压紧以限制钢索与悬臂梁之间的相对运动。
7、本发明涉及一种基于上述的悬臂梁结构的振动控制方法,利用阵列悬臂梁自身的刚度阻尼特性实现被动式振动控制;通过向压电陶瓷纤维片施加时变的电压信号,通过位移传感器采集的振动幅值进行负反馈控制,实现主动振动控制。
8、所述的压电陶瓷纤维片的工作电压在-500v至1500v,不同电压下能够输出相应的力和位移。在振动过程中,可以根据位移传感器采集到的反馈信号计算压电纤维片抵消当前位移所需的电压。
9、技术效果
10、本发明采用具有阻尼效果的悬臂梁两侧粘贴压电陶瓷纤维片,悬臂梁末端与中心轴通过钢索实现柔性连接,使得外框架与中心轴能够产生相对运动,悬臂梁在压电陶瓷纤维片的作用下能够通过钢索向中间轴传递力,从而实现对振动的主动抑制。
技术特征:
1.一种柔性索系约束边界的悬臂梁结构,其特征在于,包括:外框架、设置于外框架内的若干柔性钢索以及悬臂梁,其中:每根悬臂梁的一端与外框架固定连接,另一端与柔性钢索相连,柔性钢索的两端分别与位于外框架顶部的中心轴和底部的钢索保持架相连;
2.根据权利要求1所述的柔性索系约束边界的悬臂梁结构,其特征是,所述的外框架为圆形结构,对应柔性钢索以中心轴为中心对称设置,悬臂梁为半径方向中心对称且多层设置形成索系结构。
3.根据权利要求1所述的柔性索系约束边界的悬臂梁结构,其特征是,所述的悬臂梁与柔性钢索之间通过铝套压制连接,具体为:悬臂梁的末端设有穿丝孔,柔性钢索穿过穿丝孔并在穿丝孔上方和下方通过铝套压制以限制位移。
4.根据权利要求1所述的柔性索系约束边界的悬臂梁结构,其特征是,所述的中心轴通过滑动轴承与外框架相连。
5.根据权利要求1所述的柔性索系约束边界的悬臂梁结构,其特征是,每根悬臂梁的末端与两根柔性钢索连接。
6.一种基于权利要求1-5中任一所述悬臂梁结构的振动控制方法,其特征在于,利用阵列悬臂梁自身的刚度阻尼特性实现被动式振动控制;通过向压电陶瓷纤维片施加时变的电压信号,通过位移传感器采集的振动幅值进行负反馈控制,实现主动振动控制。
技术总结
一种具有柔性索系约束边界的悬臂梁结构,包括:外框架、设置于外框架内的若干柔性钢索以及悬臂梁,其中:每根悬臂梁的一端与外框架固定连接,另一端与柔性钢索相连,柔性钢索的两端分别与位于外框架顶部的中心轴和底部的钢索保持架相连。本装置能够传递力并且满足悬臂梁边界约束。
技术研发人员:亓文豪,颜格,卢佳佳,闫寒,时军委,张文明
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!