一种基于柔性夹爪的半成品陶瓷上釉装置
本发明属于陶瓷工业自动化领域,主要涉及一种基于柔性夹爪的半成品陶瓷上釉装置。
背景技术:
1、陶瓷属于一种无机非金属材料,经常用于日常生活,使用范围非常广,是必不可少的生活用品,如家中的厨房餐具,茶具,陶瓷装饰品等等,陶瓷具有不掉色、不吸水、不变性、对人体无害、易清洗等优点,但同时也具有易碎等问题。尽管现代科技发展迅速,而陶瓷成品的生产过程一直缺乏有效的自动化手段,陶瓷成品生产仍然存在工艺过程复杂、人力成本投入高、工序之间自动化程度低等问题。
2、研究半成品陶瓷上釉手段成了陶瓷工业自动化领域的一大研究热点。半成品陶瓷上釉技术是自动化技术与加工工艺的深度融合,这一技术可以代替人力按照实际加工需求进行自动化上釉,从而大大节省加工成本,解放人力,提高实际生产加工效率。
3、按照上釉方式的不同,半成品陶瓷上釉主要分为手工上釉和机器上釉。手工上釉依靠人力使用画笔工具,在陶瓷的小块区域手工绘制图案,这一方法尽管具有一定的柔顺性,但人力成本过高、可重复性低、实际生产效率差,且对上釉工人自身生产经验要求较高。机器上釉可以实现一定的自动化,但上釉工具与陶瓷表面存在刚性接触,容易在陶瓷表面造成划痕。本发明为一种基于柔性夹爪的半成品陶瓷上釉装置,其具有柔顺性好、不易破坏陶瓷、自动化程度高、使用方便等优点,将柔性夹爪应用到半成品陶瓷上釉技术上不仅具有良好的发展前景,同时具有极大的创新优势。
技术实现思路
1、为了解决现有技术中存在的问题,本发明的目的是提供一种基于柔性夹爪的半成品陶瓷上釉装置,以解决现有陶瓷上釉方式中存在的人力成本高、可重复性低、刚性接触等问题,该装置结构简单、运用方便,具有良好的自适应性和柔顺性。
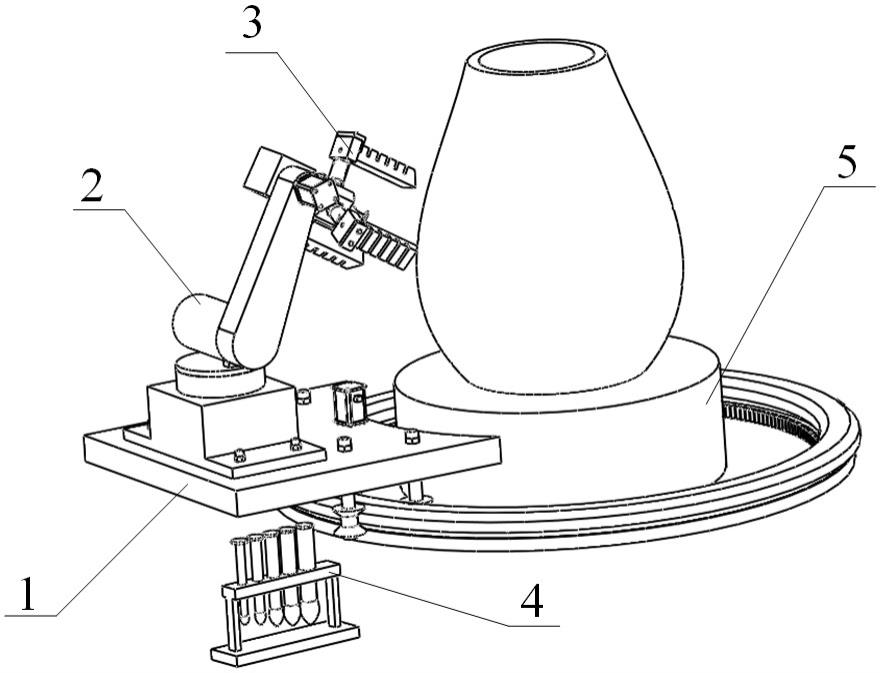
2、本发明所述的一种基于柔性夹爪的半成品陶瓷上釉装置,由内啮合旋转轨道组件(1)、机械臂组件(2)、柔性夹爪组件(3)、画笔组件(4)、托台组件(5)和电气控制回路(6)组成。
3、内啮合旋转轨道组件(1)的内啮合旋转导轨(1-1)放置在工作台上,导轨卡轮一(1-2)、导轨卡轮二(1-7)、导轨卡轮三(1-8)、导轨卡轮四(1-9)通过螺栓连接固定在基板(1-3)上,同时导轨卡轮一(1-2)和导轨卡轮二(1-7)的卡槽要与内啮合旋转导轨(1-1)的内圈侧进行卡接,导轨卡轮三(1-8)、导轨卡轮四(1-9)的卡槽要与内啮合旋转导轨(1-1)的外圈侧进行卡接,伺服电机(1-4)外壳与基板(1-3)进行螺栓连接固定,伺服电机(1-4)的电机轴与驱动轴(1-5)通过焊接进行固定,驱动轴(1-5)与驱动齿轮(1-6)进行键连接固定,驱动齿轮(1-6)啮合在内啮合旋转导轨(1-1)的内齿上,伺服电机(1-4)作为驱动器,驱动基板(1-3)沿着内啮合旋转导轨(1-1)中心轴线做环转运动。其中导轨卡轮一(1-2)、导轨卡轮二(1-7)、导轨卡轮三(1-8)、导轨卡轮四(1-9)的组成结构完全相同。
4、机械臂组件(2)的电机座(2-1)通过螺栓固定在基板(1-3)上,并且电机座(2-1)内部具有电机,电机座(2-1)内部电机的电机轴与旋转底盘(2-2)进行焊接固定,驱动旋转底盘(2-2)绕自身中心轴线做旋转运动,旋转底盘(2-2)上焊接大臂电机(2-3),大臂电机(2-3)的电机轴与大臂(2-4)焊接固定,通过大臂电机(2-3)电机轴的转动带动大臂(2-4)做摆动运动,小臂电机(2-5)的电机壳使用螺栓连接固定在大臂(2-4)末端上,小臂电机(2-5)的电机轴与小臂(2-6)焊接固定,通过小臂电机(2-5)的电机轴转动带动小臂(2-6)做摆动运动,小臂(2-6)内部电机的电机轴与末端旋转圆盘(2-7)焊接固定,可以驱动末端旋转圆盘(2-7)绕自身中心做旋转运动。
5、机械臂组件(2)的末端旋转圆盘(2-7)焊接固定安装柔性夹爪组件(3)中的夹爪中心(3-1),支撑杆一(3-2)、支撑杆二(3-3)、支撑杆三(3-4)通过螺栓连接固定在夹爪中心(3-1)上,活动杆一(3-5)、活动杆二(3-6)、活动杆三(3-7)分别套接在支撑杆一(3-2)、支撑杆二(3-3)、支撑杆三(3-4)内,形成三个伸缩杆结构,固定块一(3-8)、固定块二(3-9)、固定块三(3-10)分别焊接在活动杆一(3-5)、活动杆二(3-6)、活动杆三(3-7)末端,挡板一(3-11)、挡板二(3-12)、挡板三(3-13)分别通过螺栓连接固定在固定块一(3-8)、固定块二(3-9)、固定块三(3-10)上,固定块一(3-8)、挡板一(3-11)通过卡接作用固定住柔性手指一(3-14)首端,固定块二(3-9)、挡板二(3-12)通过卡接作用固定住柔性手指二(3-15)首端,固定块三(3-10)、挡板三(3-13)通过卡接作用固定住柔性手指三(3-16)首端,球铰固定杆(3-17)焊接固定在夹爪中心(3-1)上,球铰活动杆(3-18)与球铰固定杆(3-17)通过球铰接方式连接,球铰活动杆(3-18)末端焊接有电磁铁(3-19)。其中支撑杆一(3-2)、支撑杆二(3-3)、支撑杆三(3-4)结构组成完全相同,沿夹爪中心(3-1)中心轴线相隔120°安装固定,活动杆一(3-5)、活动杆二(3-6)、活动杆三(3-7)结构组成完全相同,固定块一(3-8)、固定块二(3-9)、固定块三(3-10)结构组成完全相同,挡板一(3-11)、挡板二(3-12)、挡板三(3-13)结构组成完全相同,柔性手指一(3-14)、柔性手指二(3-15)、柔性手指三(3-16)结构组成完全相同。
6、画笔组件(4)的画笔架(4-1)水平放置在内啮合旋转导轨(1-1)外侧,具体位置可由操作者根据需求调节,画笔(4-2)按尺寸大小排列放置在画笔架(4-1)上,并且画笔(4-2)笔后端焊接有铁盘(4-3)。
7、托台组件(5)的托台(5-1)水平放置在内啮合旋转导轨(1-1)中心轴线上,且与工作台通过螺栓固定,吸盘(5-3)通过胶粘固定在托台(5-1)上部凹坑内,半成品陶瓷(5-2)通过吸盘(5-3)吸附固定在托台(5-1)中心轴线上。
8、根据如上所述的一种基于柔性夹爪的半成品陶瓷上釉装置,电气控制回路(6)中,给伺服阀(6-5)、电磁换向阀二(6-11)通电后,空气压缩机(6-1)提供压缩气体,经过空气过滤器(6-2)、减压阀(6-3)、油雾器(6-4)净化,送入柔性手指一(3-14)的进气口中,从而给柔性手指一(3-14)提供内部压力,柔性手指一(3-14)产生弯曲变形,压力传感器二(6-10)将检测到的压力发送给控制器后控制器通过控制伺服阀(6-5)可以实现柔性手指一(3-14)内部压力的控制,从而控制柔性手指一(3-14)的弯曲变形程度,同时控制回路中连接着真空发生器一(6-8)和消音器一(6-9),当电磁换向阀一(6-7)通电后可以对柔性手指一(3-14)产生负压,从而更好地控制柔性手指一(3-14)的伸展程度。
9、同时空气压缩机(6-1)提供的压缩气体可以提供给支撑杆一(3-2)和活动杆一(3-5),通过电磁换向阀三(6-14)的通断电控制实现活动杆一(3-5)的伸缩运动,其中流量计(6-12)可采集气路流量信息并发送给控制器。以上仅对柔性手指一(3-14)的控制过程作出说明,柔性手指二(3-15)和柔性手指三(3-16)的控制方法和柔性手指一(3-14)的控制方法相同,且三根柔性手指可以分别实现单独控制。
10、通过对球铰机构末端电磁铁(3-19)的通电可以对画笔(4-2)后端铁盘(4-3)进行吸附,画笔(4-2)通过三根柔性手指抓取的中段与电磁铁(3-19)吸附的后端相互配合实现两点固定从而被柔性夹爪组件(3)抓取。电磁铁(3-19)断电且三根柔性手指放气后,可以实现画笔(4-2)的放开,电磁换向阀四(6-15)得电后,可通过真空发生器二(6-16)实现吸盘(5-3)对半成品陶瓷(5-2)底部的负压吸附。
11、与现有技术相比,本发明具有以下优点和有益效果:
12、1.本发明所述的一种基于柔性夹爪的半成品陶瓷上釉装置,通过柔性夹爪组件(3)抓取画笔(4-2),实现了对半成品陶瓷(5-2)的柔性接触,提高了上釉过程中的柔顺性和安全性,避免了传统刚性接触对半成品陶瓷(5-2)的接触破坏,节约了生产成本。
13、2.本发明所述的一种基于柔性夹爪的半成品陶瓷上釉装置,设计了内啮合旋转轨道组件(1),采用伺服电机(1-4)作为驱动器,基板(1-3)能够沿内啮合旋转导轨(1-1)中心轴线进行旋转运动,对半成品陶瓷(5-2)自身的旋转对称性具有一定普适性,使用真空发生器二(6-16)实现吸盘(5-3)对半成品陶瓷(5-2)底部的负压吸附,进而实现半成品陶瓷(5-2)在上釉过程中的位置固定,避免旋转半成品陶瓷(5-2)自身从而造成半成品陶瓷(5-2)与托台(5-1)之间的相对滑移,使上釉操作更精确。
14、3.本发明所述的一种基于柔性夹爪的半成品陶瓷上釉装置,采用伸缩杆结构设计,利用气压驱动伸缩杆实现柔性夹爪臂的伸缩运动,结构轻巧,同时夹爪中心(3-1)末端具有能够与画笔(4-2)后端铁盘(4-3)吸附的电磁铁(3-19),能够满足不同尺寸画笔(4-2)的抓取需求。
15、4.本发明所述的一种基于柔性夹爪的半成品陶瓷上釉装置,通过对柔性手指一(3-14)、柔性手指二(3-15)、柔性手指三(3-16)的分别控制,可以实现三个柔性手指内部气压的差异化,通过对球铰机构末端电磁铁(3-19)的通电可以对画笔(4-2)后端铁盘(4-3)进行吸附,画笔(4-2)通过三根柔性手指抓取的中段与电磁铁(3-19)吸附的后端相互配合实现两点定位,从而实现画笔(4-2)被抓取时姿态偏角的变化,从而更好地实现对上釉操作的控制,同时画笔(4-2)笔尖为水滴状,通过改变画笔(4-2)的姿态偏角可以实现画笔(4-2)笔尖与半成品陶瓷(5-2)接触面大小的改变,实现画笔(4-2)上釉过程中的撇、抹、勾、点等更加精细的操作。
- 还没有人留言评论。精彩留言会获得点赞!