一种建筑喷涂机器人
本发明涉及建筑墙体涂覆工装,具体涉及一种建筑喷涂机器人。
背景技术:
1、建筑施工的墙体涂覆为一类系统性的工程,其中面层的喷涂主要为装饰性涂料的喷涂,涂料以乳胶、漆料、石灰等为主;现有的喷涂作业设备采用单一的雾化喷嘴施工,大多采用人工手持喷嘴进行喷涂的方式施工,这使得作业效率低下,且在喷涂时,喷嘴的单次扫掠喷涂的覆盖面积既定,对此,现开发出一种喷涂用的机器人,其以现有的喷嘴喷涂结构为基础,采用并联多组的喷嘴结构,并设置相应的伸缩收展结构,从而实现对喷涂覆盖面积的调节,对此,需要进行具体设备的开发。
技术实现思路
1、本发明的目的在于针对现有技术的缺陷和不足,提供了一种建筑喷涂机器人,其设置两组的伸展结构,并且在一组的伸展结构中设置主副伸展结构,进而设置相应的驱动结构及导向结构,实现本装置在安装喷嘴后,通过调节伸展结构的位置,实现调节喷涂扫掠时的覆盖面积。
2、为达到上述目的,本发明采用了下列技术方案:
3、它包含机架、喷嘴,其中喷嘴为阵列设置,它还包含:
4、连接架组件,所述的连接架组件为两个,且上下对称设置在机架上;
5、主驱动机构,所述的主驱动机构设置在机架上,且主驱动机构与连接架组件传动设置;
6、副驱动机构,所述的副驱动机构设置在连接架组件上,且副驱动机构与主驱动机构传动设置;
7、在使用时,将喷嘴通过管道外接增压泵,进而通过喷嘴喷出涂料进行表面的喷涂,通过主驱动机构带动副驱动机构,进而主驱动机构、副驱动机构协同工作带动连接架组件展开,或是带动连接架组件收起,当连接架组件展开时,机架移动,连接架组件喷涂路径的覆盖面积增大,但单次通过时单位面积喷涂量减小,当连接架组件收起时,连接架组件喷涂路径的覆盖面积减小,但单次通过时单位面积喷涂量增大。
8、优选地,所述的连接架组件包含:
9、副支架,所述的副支架为两个,且两个副支架呈上下对称设置;
10、主支架,所述的主支架为两个,且两个主支架呈上下对称设置,且两个主支架设置在两个副支架之间;
11、主滑轨,所述的主滑轨固定设置在主支架上,机架上固定设置有滑块,滑块滑动设置在主滑轨上;
12、副滑轨,所述的副滑轨固定设置在副支架上;
13、安装架,所述的安装架固定设置在主支架上,且安装架滑动架设在副滑轨上;
14、喷嘴等距排列固定设置在主支架、副支架上;
15、在使用时,主支架通过主滑轨架设在滑块上滑动,进而实现主支架的收展,且主支架移动时,主支架带动副支架同步移动,副支架通过副滑轨架设在安装架上滑动,进而实现副支架以主支架为参照基点的收展。
16、优选地,所述的主驱动机构包含:
17、主动轴,所述的主动轴通过轴承旋设在机架上;
18、主齿轮,所述的主齿轮固定设置在主动轴上;
19、主齿条,所述的主齿条固定设置在主支架上面向另一个主支架一侧的壁上,主齿轮夹设在两个相邻的主齿条之间,且主齿轮与主齿条相互啮合设置;
20、驱动轴,所述的驱动轴通过轴承旋设在机架上,驱动轴与主动轴之间通过伞齿轮组传动设置;
21、在使用时,旋转驱动轴,驱动轴通过伞齿轮组传动带动主动轴旋转,主动轴带动主齿轮旋转,进而主齿轮带动主齿条移动,主齿条带动主支架在主滑轨上滑动,进而实现调整主支架的位置进行主支架的收展,在主支架移动时,主支架通过安装架带动副支架同步移动。
22、优选地,所述的副驱动机构包含:
23、支撑滑轨,所述的支撑滑轨固定设置在主支架上;
24、支撑架,所述的支撑架滑动架设在支撑滑轨上;
25、六角传动杆,所述的六角传动杆通过轴承旋设在主支架上;
26、副六角套,所述的副六角套活动套设在六角传动杆上,且副六角套通过轴承旋设在支撑架上;
27、支撑轴,所述的支撑轴通过轴承旋设在支撑架上,副六角套与支撑轴之间通过伞齿轮组传动设置;
28、副齿条,所述的副齿条两个为一组设置,且两个副齿条分别固定设置在两个相邻的主支架、副支架相向一侧的壁上;
29、副齿轮,所述的副齿轮固定设置在支撑轴上,且副齿轮夹设在一组的两个副齿条之间,副齿轮与副齿条啮合设置;
30、传动件,所述的传动件设置在机架上,驱动轴与六角传动杆之间通过传动件传动设置;
31、在使用时,通过传动件带动六角传动杆旋转,六角传动杆带动带动副六角套旋转,副六角套通过伞齿轮组带动支撑轴旋转,支撑轴带动副齿轮旋转,进而副齿轮带动副齿条移动,此时一组的主支架、副支架中,以主支架为静态参照基点,副支架移动实现收展调节,此时副支架通过副滑轨架在安装架上滑动,此时副齿轮移动,副齿轮带动支撑架在支撑滑轨上滑动,且支撑架带动副六角套在六角传动杆上滑动。
32、优选地,所述的传动件包含:
33、支撑座,所述的支撑座固定设置在机架上;
34、传动六角套,所述的传动六角套活动套设在六角传动杆上,且传动六角套通过轴承旋设在支撑座上,传动六角套与驱动轴之间通过伞齿轮组传动设置;
35、在使用时,驱动轴通过伞齿轮组带动传动六角套旋转,进而传动六角套带动六角传动杆旋转,且在副支架与主支架之间相对移动时,传动六角套在六角传动杆上滑动。
36、优选地,所述的六角传动杆上串联设置有离合器,且离合器设置在副六角套与传动六角套之间;
37、在使用时,将离合器闭合连接,则离合器两端轴侧的六角传动杆均旋转,即实现传动六角套旋转并通过六角传动杆带动副六角套旋转,将离合器断开连接,则传动六角套带动该侧的六角传动杆旋转,而离合器位于副六角套一侧的六角传动杆静止。
38、优选地,所述的机架上固定设置有驱动电机,驱动电机的输出轴上固定时设置有驱动齿轮,启动齿轮与主齿轮啮合设置;
39、在使用时,驱动电机通过驱动齿轮带动主齿轮旋转,主齿轮带动主动轴旋转,进而主动轴通过伞齿轮组带动驱动轴旋转,进而实现驱动轴带动六角传动杆旋转。
40、与现有技术相比,本发明的有益效果是:
41、主支架之间通过主齿轮及主齿条连接,副支架与主支架之间通过副齿轮及副齿条连接,进而通过驱动主齿轮、副齿轮旋转,实现主支架之间的收展及主支架、副支架之间的收展;
42、主动轴与六角传动杆之间通过驱动轴传动连接,六角传动杆上的传动六角套与副六角套之间设置离合器,进而通过控制力耦合器的开合,实现控制仅主支架收展,或是主支架、副支架同时收展。
技术特征:
1.一种建筑喷涂机器人,它包含机架(1)、喷嘴(2),其中喷嘴(2)为阵列设置;其特征在于,它还包含:
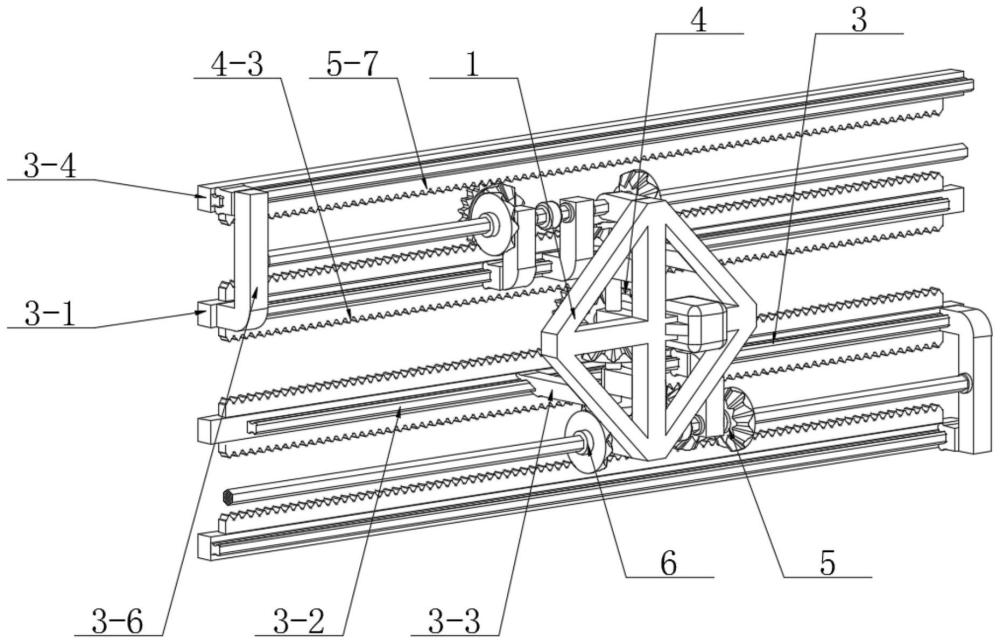
2.根据权利要求1所述的一种建筑喷涂机器人,其特征在于:所述的连接架组件(3)包含:
3.根据权利要求2所述的一种建筑喷涂机器人,其特征在于:所述的主驱动机构(4)包含:
4.根据权利要求3所述的一种建筑喷涂机器人,其特征在于:所述的副驱动机构(5)包含:
5.根据权利要求4所述的一种建筑喷涂机器人,其特征在于:所述的传动件(6)包含:
6.根据权利要求5所述的一种建筑喷涂机器人,其特征在于:所述的六角传动杆(5-3)上串联设置有离合器(7),且离合器(7)设置在副六角套(5-4)与传动六角套(6-2)之间。
7.根据权利要求6所述的一种建筑喷涂机器人,其特征在于:所述的机架(1)上固定设置有驱动电机(8),驱动电机(8)的输出轴上固定时设置有驱动齿轮(9),启动齿轮与主齿轮(4-2)啮合设置。
技术总结
一种建筑喷涂机器人,本发明涉及建筑墙体涂覆工装技术领域,喷嘴为阵列设置,连接架组件为两个,且上下对称设置在机架上,主驱动机构设置在机架上,且主驱动机构与连接架组件传动设置,副驱动机构设置在连接架组件上,且副驱动机构与主驱动机构传动设置;其设置两组的伸展结构,并且在一组的伸展结构中设置主副伸展结构,进而设置相应的驱动结构及导向结构,实现本装置在安装喷嘴后,通过调节伸展结构的位置,实现调节喷涂扫掠时的覆盖面积。
技术研发人员:孟起,薛琪,项如忆,吴晨雪
受保护的技术使用者:金陵科技学院
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!