一种适用于多尺寸地砖薄贴作业的建筑机器人
本发明涉及一种建筑机器人,具体涉及一种适用于多尺寸地砖薄贴作业的建筑机器人,本发明属于建筑。
背景技术:
1、随着人工智能技术、传感器技术和bim技术的不断进步,用于现场施工的建筑机器人技术逐渐兴起。所谓建筑机器人,是指应用于建筑行业建设施工领域的机器人系统,能够依照计算机预设程序或操作人员的指令自动执行重复性高强度施工任务,可按具体职责分为主体结构、装修、其他新型施工三大类型。在装修施工领域,地砖铺贴作业需求量大、质量要求高,传统手工铺贴地砖存在施工周期长、劳动强度大、工作效率低等问题,若能采用可进行地砖铺贴作业的建筑机器人替代人工作业,则不但可以减少劳动力,还可以通过自动化施工保证地砖铺贴的质量和效率,具有极大的应用价值。
技术实现思路
1、本发明为了解决传统手工铺贴地砖存在施工周期长、劳动强度大且工作效率低的问题,进而提出一种适用于多尺寸地砖薄贴作业的建筑机器人。
2、本发明为解决上述问题采取的技术方案是:
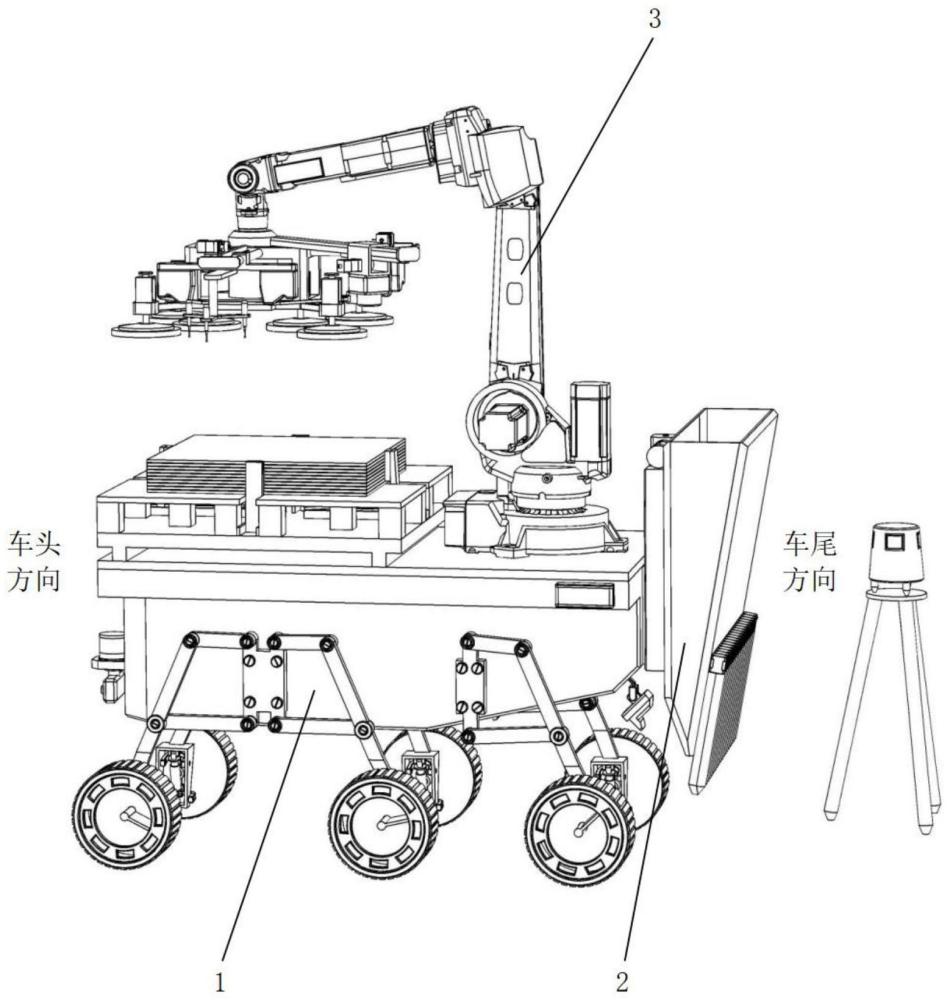
3、本发明包括电控子系统、六自由度机械手、移动子系统、供胶子系统和铺砖子系统,所述供胶子系统和铺砖子系统均与所述移动子系统连接,六自由度机械手安装在移动子系统上,且六自由度机械手的执行端与铺砖子系统连接;所述电控子系统用于连接和统筹移动子系统、供胶子系统、铺砖子系统的分控机,使移动子系统、供胶子系统、铺砖子系统形成统一的有机整体,进而完成地砖薄贴作业。
4、本发明的有益效果是:
5、1、本发明涉及一种适用于多尺寸地砖薄贴工艺的装修类建筑机器人,可针对不同尺寸的地砖进行智能化地面布局和薄贴作业,能够根据施工原始地面的高低起伏调节自身的姿态,保证与作业标高的水平精度;
6、2、本发明能够采集地面特征点的高度值大小,并为之供应相适量的地砖胶;
7、3、本发明还能够对铺贴地砖的上表面进行水平方向的找正和高度方向的找平,从而确保铺贴地砖上表面的总体平整度以及铺贴空鼓率满足工艺要求。
8、4、采用本发明替代人工作业,不但可以减少劳动力,还可以通过自动化施工保证地砖铺贴的质量,提高工作效率。
技术特征:
1.一种适用于多尺寸地砖薄贴作业的建筑机器人,它包括电控子系统和六自由度机械手(3.3),其特征在于:所述一种适用于多尺寸地砖薄贴作业的建筑机器人包括移动子系统(1)、供胶子系统(2)和铺砖子系统(3),所述供胶子系统(2)和铺砖子系统(3)均与所述移动子系统(1)连接,六自由度机械手(3.3)安装在移动子系统(1)上,且六自由度机械手(3.3)的执行端与铺砖子系统(3)连接;所述电控子系统用于连接和统筹移动子系统(1)、供胶子系统(2)、铺砖子系统(3)的分控机,使移动子系统(1)、供胶子系统(2)、铺砖子系统(3)形成统一的有机整体,进而完成地砖薄贴作业。
2.根据权利要求1所述的一种适用于多尺寸地砖薄贴作业的建筑机器人,其特征在于:所述移动子系统(1)包括车身主体(1.6)、承载平台(1.4)、两个前悬架机构、两个后悬架机构、车轮机构、供胶料仓导轨(1.2)、定位导航组件和标高基准组件,承载平台(1.4)安装在车身主体(1.6)的上部,所述铺砖子系统(3)安装在承载平台(1.4)的上表面;所述两个前悬架机构对称安装在车身主体(1.6)车头端的左、右两侧,所述每个前悬架机构与两个车轮机构连接;所述两个后悬架机构对称安装在车身主体(1.6)车尾端的左、右两侧,所述每个后悬架机构与一个车轮机构连接;定位导航组件安装在车身主体(1.6)车头方向的前端,所述标高基准组件位于车身主体(1.6)的车尾端,用于为移动子系统(1)分控机提供多尺寸地砖薄贴机器人在进行地砖薄贴作业时承载平台(1.4)距离地面基准平面的高度信息,两个供胶料仓导轨(1.2)分别安装在车身主体(1.6)车尾端的侧壁上并与供胶子系统(2)连接。
3.根据权利要求2所述的一种适用于多尺寸地砖薄贴作业的建筑机器人,其特征在于:所述每个前悬架机构包括悬架连杆基座a(1.8)、悬架上连杆a(1.9)、悬架下连杆a(1.17)、悬架长连杆a(1.10)、悬架上连杆b(1.7)、悬架下连杆b(1.18)和悬架长连杆b(1.20),悬架连杆基座a(1.8)安装在车身主体(1.6)的车头端的侧壁上,悬架上连杆a(1.9)的一端通过销轴与悬架连杆基座a(1.8)上部的对应孔位连接并形成转动副,悬架上连杆a(1.9)的另一端通过销轴与悬架长连杆a(1.10)的上端转动连接,悬架下连杆a(1.17)的一端通过销轴与悬架连杆基座a(1.8)下部的对应孔位连接并形成转动副,悬架下连杆a(1.17)的另一端通过销轴与悬架长连杆a(1.10)的中部转动连接;悬架上连杆b(1.7)的一端通过销轴与悬架连杆基座a(1.8)上部的对应孔位连接并形成转动副,悬架上连杆b(1.7)的另一端通过销轴与悬架长连杆b(1.20)的上端转动连接,悬架下连杆b(1.18)的一端通过销轴与悬架连杆基座a(1.8)下部的对应孔位连接并形成转动副,悬架下连杆b(1.18)的另一端通过销轴与悬架长连杆b(1.20)的中部转动连接,悬架长连杆a(1.10)和悬架长连杆b(1.20)的下端均设有框型结构(1.25),每个框型结构(1.25)与其对应的一个车轮机构连接。
4.根据权利要求2所述的一种适用于多尺寸地砖薄贴作业的建筑机器人,其特征在于:所述后悬架机构包括悬架连杆基座b(1.5)、悬架上连杆c(1.23)、悬架下连杆c(1.22)和悬架长连杆c(1.24),悬架连杆基座b(1.5)安装在车身主体(1.6)车尾端的侧壁上,悬架上连杆c(1.23)的一端通过销轴与悬架连杆基座b(1.5)上部的对应孔位相连并形成转动副,悬架上连杆c(1.23)的另一端通过销轴与悬架长连杆c(1.24)的上端转动连接;悬架下连杆c(1.22)的一端通过销轴与悬架连杆基座b(1.5)下部的对应孔位相连并形成转动副,悬架下连杆c(1.22)的另一端通过销轴与悬架长连杆c(1.24)的中部转动连接;悬架长连杆c(1.24)的下端设有框型结构(1.25),框型结构(1.25)与一个车轮机构连接。
5.根据权利要求2所述的一种适用于多尺寸地砖薄贴作业的建筑机器人,其特征在于:所述车轮机构包括轮毂电机车轮(1.21)、轮轴支架(1.19)、上支臂(1.16)、下支臂(1.14)和减震器(1.15),所述上支臂(1.16)和下支臂(1.14)均为u形结构,上支臂(1.16)的两端分别通过销轴与框型结构(1.25)上部的两侧内壁转动连接,下支臂(1.14)的两端分别通过销轴与框型结构(1.25)下部的两侧外壁转动连接,轮轴支架(1.19)的上端通过销轴与上支臂(1.16)的中部转动连接,轮轴支架(1.19)的下端通过销轴与下支臂(1.14)的中部转动连接,轮轴支架(1.19)的中部与轮毂电机车轮(1.21)的中心轴固定连接;减震器(1.15)的上端通过销轴与框型结构(1.25)的上板内壁转动连接,另一端通过销轴与下支臂(1.14)中部的对应孔位转动连接。
6.根据权利要求2所述的一种适用于多尺寸地砖薄贴作业的建筑机器人,其特征在于:所述定位导航组件包括探头机架(1.11)、激光slam雷达(1.12)、rgbd视觉相机(1.13)、惯性测量单元imu,探头机架(1.11)位于车身主体(1.6)车头方向的前端,通过螺栓与车身主体(1.6)固定连接;激光slam雷达(1.12)固定安装在探头机架(1.11)的上表面;rgbd视觉相机(1.13)固定安装在探头机架(1.11)的下表面;惯性测量单元imu通过螺栓水平固定安装在车身主体(1.6)内部的对应孔位上;
7.根据权利要求2所述的一种适用于多尺寸地砖薄贴作业的建筑机器人,其特征在于:所述供胶子系统(2)包括地面检测组件和供胶机构,所述地面检测组件包括线激光发生器(2.1)、线激光发生器安装板(2.2)和rgb相机(2.3),线激光发生器安装板(2.2)固定安装在车身主体(1.6)的底部,线激光发生器(2.1)以十字型排列的方式固定安装在线激光发生器安装板(2.2)上,rgb相机(2.3)利用自身的支架固定安装在车身主体(1.6)车尾端的底部;
8.根据权利要求1所述的一种适用于多尺寸地砖薄贴作业的建筑机器人,其特征在于:所述铺砖子系统(3)包括地砖夹具组件(3.1)和地砖取放组件(3.2),地砖夹具组件(3.1)与移动子系统(1)连接,地砖取放组件(3.2)与六自由度机械手(3.3)的执行端连接。
9.根据权利要求8所述的一种适用于多尺寸地砖薄贴作业的建筑机器人,其特征在于:所述地砖夹具组件(3.1)包括夹具底座(3.1.1)、转盘电机支架(3.1.8)、转盘电机(3.1.7)、带传动(3.1.9)、曲柄转盘(3.1.3)、转盘连杆(3.1.10)、滑块式夹爪(3.1.6)、夹爪滑道(3.1.4)、支承柱体(3.1.5)和承载盖板(3.1.2),
10.根据权利要求8所述的一种适用于多尺寸地砖薄贴作业的建筑机器人,其特征在于:所述地砖取放组件(3.2)包括取放结构体(3.2.13)、回转中心轴体(3.2.14)、相机支承臂(3.2.1)、白光相机支架(3.2.3)、白光相机(3.2.4)、相机伺服电机(3.2.2)、齿轮齿条传动c(3.2.21)、传感器支承臂a(3.2.9)、传感器支架a(3.2.8)、线激光传感器(3.2.5)、传感器伺服电机a(3.2.6)、齿轮齿条传动a(3.2.7)、传感器支承臂b(3.2.15)、传感器支架b(3.2.16)、传感器伺服电机b(3.2.17)、齿轮齿条传动b(3.2.18)、传感器支架c(3.2.19)、接触式传感器(3.2.20)、吸盘支承臂(3.2.11)、电磁伸缩杆(3.2.12)和真空吸盘(3.2.10),
技术总结
一种适用于多尺寸地砖薄贴作业的建筑机器人,本发明涉及一种建筑机器人,本发明为了解决传统手工铺贴地砖存在施工周期长、劳动强度大且工作效率低的问题,本发明包括电控子系统、六自由度机械手、移动子系统、供胶子系统和铺砖子系统,所述供胶子系统和铺砖子系统均与所述移动子系统连接,六自由度机械手安装在移动子系统上,且六自由度机械手的执行端与铺砖子系统连接;所述电控子系统用于连接和统筹移动子系统、供胶子系统、铺砖子系统的分控机,使移动子系统、供胶子系统、铺砖子系统形成统一的有机整体,进而完成地砖薄贴作业。可针对不同尺寸的地砖进行智能化地面布局和薄贴作业,能够根据施工原始地面的高低起伏调节自身的姿态,保证与作业标高的水平精度。本发明属于建筑技术领域。
技术研发人员:李麒,吴文凯,赵寒涛,李长武,董莘,田力,石磊,朱金龙,矫洪成,白广利
受保护的技术使用者:黑龙江省科学院智能制造研究所
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!