一种立体泊车系统控制方法、系统、设备及介质与流程
本发明涉及泊车控制领域,特别是涉及一种立体泊车系统控制方法、系统、设备及介质。
背景技术:
1、目前,中国的立体泊车行业主要包括立体停车楼和独立立体停车设备,立体停车楼不仅占用大量城市用地,而且由于进出路程过长和过程缓慢,导致使用率很低。
2、市场上现有可用的解决方案是垂直循环泊车系统。现有的垂直循环泊车系统虽然在空间利用率、立体化结构设置、智能化停车操作等方面得到了一定优化,但是,由于立体停车设备多在高度空间上设置多层停车空间,所以在每次停车或取车过程中均需要采用一些较为复杂算法对汽车进行周转运输等,驾驶者等待时间较长,停车效率有待提升。
技术实现思路
1、基于此,本发明实施例提供一种立体泊车系统控制方法、系统、设备及介质,以提升停车效率。
2、为实现上述目的,本发明实施例提供了如下方案:
3、一种立体泊车系统控制方法,所述立体泊车系统控制方法用于控制目标立体泊车系统;
4、所述目标立体泊车系统包括:支撑立柱,运输模块,沿所述支撑立柱轴向设置的多层环形轨道,以及,多个泊车机构;
5、所述运输模块能够沿所述支撑立柱做升降运动;
6、任一层环形轨道环绕于所述支撑立柱的外周,且被所述运输模块穿过的位置形成有缺口;
7、任一泊车机构可移动地设置于所述运输模块或所述环形轨道上;
8、在所述运输模块移动至任意一层环形轨道的缺口处时,所述运输模块与该任意一层环形轨道形成封闭圆环轨道,在该封闭圆环轨道上泊车机构能够移动;
9、所述立体泊车系统控制方法,包括:
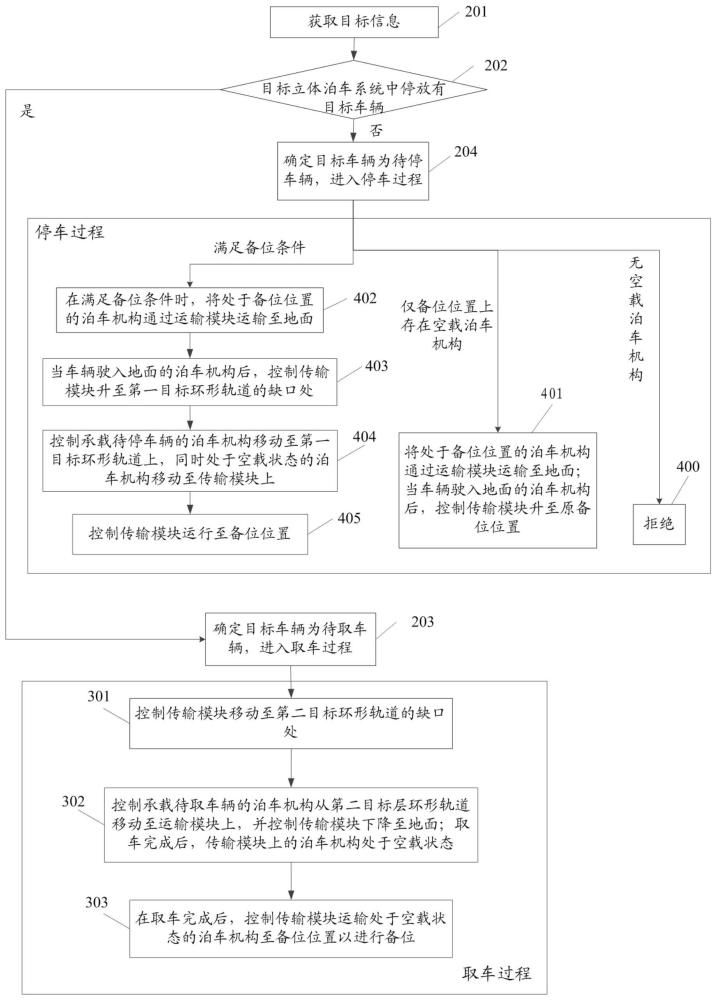
10、在取车完成后,控制所述传输模块运输处于空载状态的泊车机构至备位位置以进行备位;所述备位位置位于距离地面最近的环形轨道上;
11、在停车过程中,在满足备位条件时执行停车备位操作;
12、所述备位条件包括:至少有两个泊车机构处于空载状态,其中一个处于空载状态的泊车机构位于备位位置;
13、所述停车备位操作包括:
14、将处于备位位置的泊车机构通过运输模块运输至地面;
15、当车辆驶入地面的泊车机构后,控制传输模块升至第一目标环形轨道的缺口处;所述第一目标环形轨道为存在处于空载状态的泊车机构且距离地面最近的环形轨道;
16、控制承载待停车辆的泊车机构移动至所述第一目标环形轨道上,同时处于空载状态的泊车机构移动至传输模块上;
17、控制所述传输模块运行至所述备位位置。
18、可选地,控制承载待停车辆的泊车机构移动至所述第一目标环形轨道上,具体包括:
19、根据承载待停车辆的泊车机构与所述第一目标环形轨道上处于空载状态的泊车机构的相对位置,控制处于空载状态的泊车机构旋转第一设定角度,使得承载待停车辆的泊车机构移动至所述第一目标环形轨道上,此时处于空载状态的泊车机构移动至运输模块上。
20、可选地,根据承载待停车辆的泊车机构与所述第一目标环形轨道上处于空载状态的泊车机构的相对位置,控制处于空载状态的泊车机构旋转第一设定角度,具体包括:
21、根据承载待停车辆的泊车机构与所述第一目标环形轨道上处于空载状态的泊车机构的相对位置,确定所述空载状态的泊车机构到所述传输模块的第一最短圆弧;
22、根据所述第一最短圆弧确定第一旋转方向;
23、控制处于空载状态的泊车机构沿着所确定的第一旋转方向旋转所述第一设定角度;所述第一设定角度的具体取值由所述第一最短圆弧确定。
24、可选地,所述立体泊车系统控制方法,还包括:
25、在取车过程中,控制传输模块移动至第二目标环形轨道的缺口处;所述第二目标环形轨道为承载待取车辆的泊车机构所在的环形轨道;
26、控制承载待取车辆的泊车机构从第二目标层环形轨道移动至运输模块上,并控制传输模块下降至地面;取车完成后,传输模块上的泊车机构处于空载状态。
27、可选地,控制承载待取车辆的泊车机构从第二目标层环形轨道移动至运输模块上,具体包括:
28、根据所述待取车辆与所述传输模块的相对位置,控制承载待取车辆的泊车机构旋转第二设定角度,使得运输模块上的泊车机构移动至所述第二目标层环形轨道上,此时承载待取车辆的泊车机构移动至运输模块上。
29、可选地,根据所述待取车辆与所述传输模块的相对位置,控制承载待取车辆的泊车机构旋转第二设定角度,具体包括:
30、根据所述待取车辆与所述传输模块的相对位置,确定待取车辆到所述传输模块的第二最短圆弧;
31、根据所述第二最短圆弧确定第二旋转方向;
32、控制承载待取车辆的泊车机构沿着所述第二旋转方向旋转第二设定角度;所述第二设定角度的具体取值由所述第二最短圆弧确定。
33、可选地,在停车过程中,若仅在备位位置存在一个处于空载状态的泊车机构时,则执行停车操作;
34、所述停车操作包括:
35、将处于备位位置的泊车机构通过运输模块运输至地面;
36、当车辆驶入地面的泊车机构后,控制传输模块升至所述备位位置。
37、可选地,封闭圆环轨道上均匀分布n个泊车机构;n>1;所述第一设定角度为360°/n的整数倍。
38、可选地,所述立体泊车系统控制方法,还包括:
39、获取目标信息;所述目标信息所指示的车辆为目标车辆;
40、确定所述目标立体泊车系统中是否停放有所述目标车辆;
41、若是,则确定所述目标车辆为待取车辆,进入取车过程;
42、若否,则确定所述目标车辆为待停车辆,进入停车过程。
43、可选地,n=3;所述第一设定角度为120°。
44、本发明还提供了一种立体泊车系统控制系统,所述立体泊车系统控制系统用于实现上述的立体泊车系统控制方法;
45、所述立体泊车系统控制系统,包括:
46、取车备位模块,用于在取车完成后,控制所述传输模块运输处于空载状态的泊车机构至备位位置以进行备位;所述备位位置位于距离地面最近的环形轨道上;
47、停车备位模块,用于在停车过程中,在满足备位条件时执行停车备位操作;所述备位条件包括:至少有两个泊车机构处于空载状态,其中一个处于空载状态的泊车机构位于备位位置;
48、所述停车备位操作包括:
49、将处于备位位置的泊车机构通过运输模块运输至地面;
50、当车辆驶入地面的泊车机构后,控制传输模块升至第一目标环形轨道的缺口处;所述第一目标环形轨道为存在处于空载状态的泊车机构且距离地面最近的环形轨道;
51、控制承载待停车辆的泊车机构移动至所述第一目标环形轨道上,同时处于空载状态的泊车机构移动至传输模块上;
52、控制所述传输模块运行至所述备位位置。
53、本发明还提供了一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的立体泊车系统控制方法。
54、本发明还提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的立体泊车系统控制方法。
55、根据本发明提供的具体实施例,公开了以下技术效果:
56、本发明实施例提出的立体泊车系统控制方法、系统、设备及介质,在停车或取车后,控制传输模块运输空载泊车机构至距离地面最近的环形轨道上,即备位位置,保证了下一次停车时,传输模块上处于空载状态的泊车平台能够以最短的行程降至地面,减少了驾驶者的等待时间,提升了停车效率。
- 还没有人留言评论。精彩留言会获得点赞!