一种舵轮型停车机器人的制作方法
本技术属于agv领域,涉及一种机器人,特别是一种舵轮型停车机器人。
背景技术:
1、目前的停车机器人,其转向是通过差速器实现的,即在agv的底部四角处安装四个差速器,通过差速器的差速来实现机器人的转弯。
2、目前的停车机器人只能实现前进、后退以及转弯的功能,不能实现平移的功能,而不能平移的话,会对停车库的大小有一定的要求,不能满足多元化的停车需求。
技术实现思路
1、本实用新型的目的在于提供一种结构设计科学合理、具有平移功能、方便停车操作、易于实现的舵轮型停车机器人。
2、本实用新型解决其技术问题是通过以下技术方案实现的:
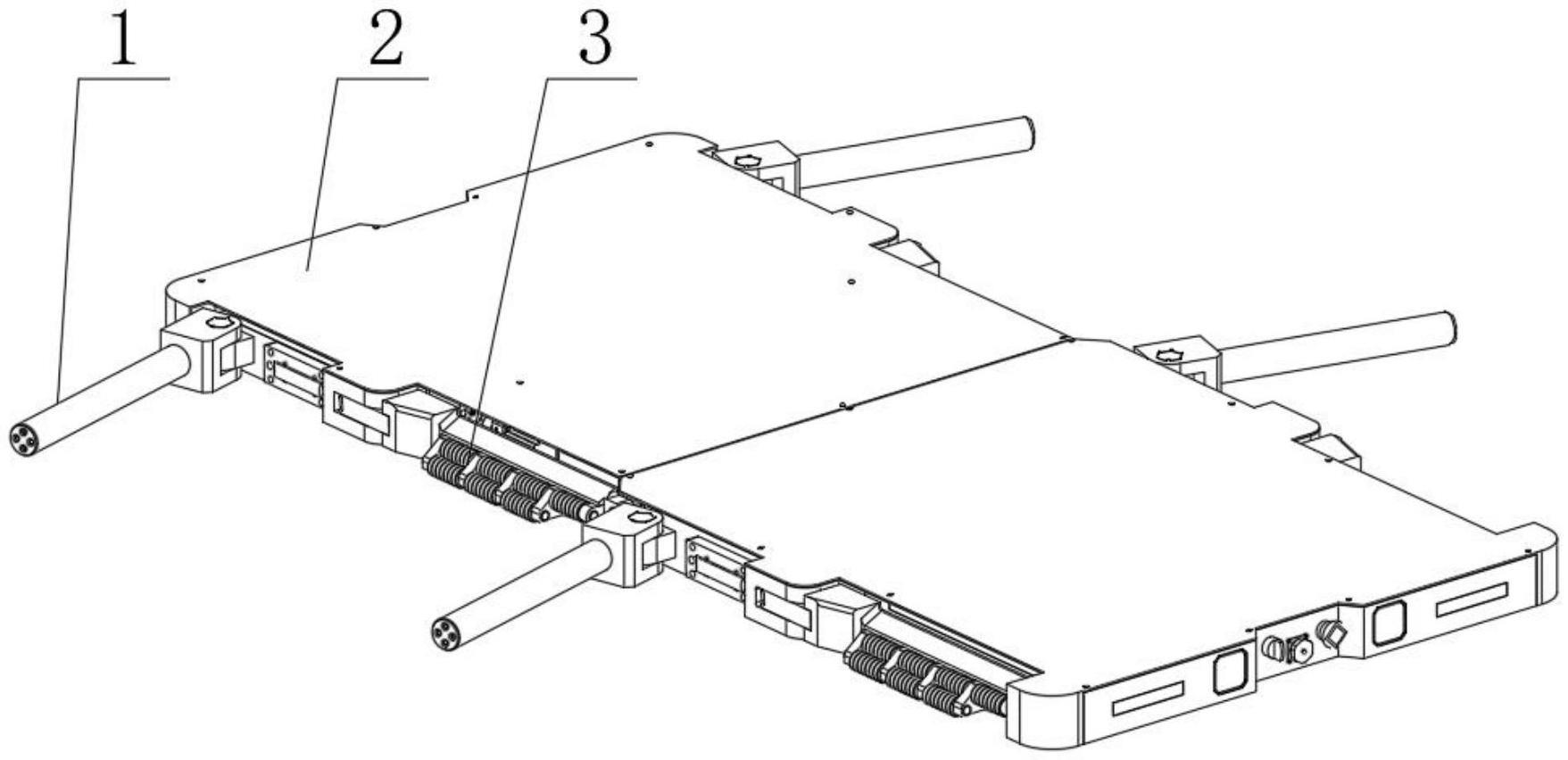
3、一种舵轮型停车机器人,包括机器人本体,其特征在于:在所述机器人本体的底部四角处设置有舵轮机构,所述的舵轮机构由旋转驱动组件及舵轮驱动组件构成,所述的旋转驱动组件包括第一驱动电机、驱动齿盘、回转支承及舵轮,在所述第一驱动电机的输出轴上安装有驱动齿盘,该驱动齿盘与回转支承上的外齿圈相啮合,在回转支承的底部中间位置安装有舵轮;
4、所述的舵轮驱动组件包括减速电机,在回转支承的底部舵轮一侧安装有减速电机,减速电机的输出轴与舵轮的轮轴相平行,减速电机通过皮带驱动舵轮转动。
5、而且,在所述机器人本体的两侧部设置有托轮机构,各托轮机构均由前后设置的挡臂组件及夹持臂组件构成,所述的挡臂组件包括挡臂、电动推杆及接近开关,在所述机器人本体的侧部铰装有挡臂,该挡臂由安装在机器人本体上的电动推杆驱动摆动,在电动推杆的下端设有接近开关;
6、所述的夹持臂组件包括夹持臂、涡轮、蜗杆及第二驱动电机,在所述机器人本体的侧部通过涡轮铰装有夹持臂,在涡轮上啮合有由第二驱动电机驱动的蜗杆。
7、本实用新型的优点和有益效果为:
8、1、本舵轮型停车机器人,通过将传统停车机器人上的差速器、行走轮替换为舵轮,实现了停车机器人的360度旋转,减少了对停车库空间的要求,方便停车;同时,通过对舵轮驱动组件的合理布置,减小了回转支承的直径,从而减小了因适配回转支承直径所需的舵轮机构厚度,满足对汽车方便承托的要求。
9、2、本舵轮型停车机器人,通过将现有的电缸驱动式夹持臂或者锥齿轮驱动式夹持臂设计为涡轮蜗杆配合的形式,在满足承托力度的同时,增加了自锁功能,保证对车轮夹持的可靠性,进而保证对汽车承托的稳定性。
10、3、本实用新型设计科学合理,具有具有平移功能、方便停车操作、易于实现的优点,是一种具有较高创新性的舵轮型停车机器人。
技术特征:
1.一种舵轮型停车机器人,包括机器人本体,其特征在于:在所述机器人本体的底部四角处设置有舵轮机构,所述的舵轮机构由旋转驱动组件及舵轮驱动组件构成,所述的旋转驱动组件包括第一驱动电机、驱动齿盘、回转支承及舵轮,在所述第一驱动电机的输出轴上安装有驱动齿盘,该驱动齿盘与回转支承上的外齿圈相啮合,在回转支承的底部中间位置安装有舵轮;
2.根据权利要求1所述的一种舵轮型停车机器人,其特征在于:在所述机器人本体的两侧部设置有托轮机构,各托轮机构均由前后设置的挡臂组件及夹持臂组件构成,所述的挡臂组件包括挡臂、电动推杆及接近开关,在所述机器人本体的侧部铰装有挡臂,该挡臂由安装在机器人本体上的电动推杆驱动摆动,在电动推杆的下端设有接近开关;
技术总结
本技术属于AGV领域,涉及一种舵轮型停车机器人,包括机器人本体,其特征在于:在所述机器人本体的底部四角处设置有舵轮机构,所述的舵轮机构由旋转驱动组件及舵轮驱动组件构成,所述的旋转驱动组件包括第一驱动电机、驱动齿盘、回转支承及舵轮,在所述第一驱动电机的输出轴上安装有驱动齿盘,该驱动齿盘与回转支承上的外齿圈相啮合,在回转支承的底部中间位置安装有舵轮;所述的舵轮驱动组件包括减速电机,在回转支承的底部舵轮一侧安装有减速电机,减速电机的输出轴与舵轮的轮轴相平行,减速电机通过皮带驱动舵轮转动。本技术设计科学合理,具有具有平移功能、方便停车操作、易于实现的优点,是一种具有较高创新性的舵轮型停车机器人。
技术研发人员:刘君岩,张新宇
受保护的技术使用者:天津阿备默机器人科技有限公司
技术研发日:20230605
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!