清洁机器人的制作方法
1.本发明涉及机器人的技术领域,尤其涉及一种清洁机器人。
背景技术:
2.家庭玻璃窗的传统清洁方式基本上是人工擦洗,室外玻璃窗需拆窗清洗,墙面较高处部分则平时很难清洁,偶尔用拖把擦拭。如果是老年人独居的家庭,很难处理外墙玻璃及室内墙面较高处的清洁问题。而商业或办公场所的玻璃窗则一般由清洁公司来处理,用毛刷擦拭然后以喷水方式清洗大楼外部玻璃窗,人工成本较高,尤其是在天气异常时,清洁人员在户外工作强度较大使用的悬吊平台在高层楼房处也易被风刮得摇晃摆动从而重心不稳,可能导致人员发生滑倒或清洗器具掉落砸伤人等危险意外。
3.为了替代人工清理玻璃,现有技术中存在的清洁机器人。在擦拭玻璃窗或墙面时,清洁机器人高速电机旋转产生的负压吸附在玻璃窗或墙面上,然后通过低速电机驱动轮组件具或履带让机器行进,靠粘附在机器底部的抹布擦拭玻璃窗或墙面,达到清洁的目的。
4.清洁机器人受限于其原理,存在以下问题:
5.1、机器履带或轮子遇到水渍极易打滑,轻则无法正常前行,擦拭作用力减小导致无法有效清洁玻璃窗或墙面,重则可能还会造成机器摔落,造成危险。
6.2、清洁机器人主要是利用抹布擦拭玻璃窗或墙面,其清洁效果仅对于轻微的泥沙灰尘有效,如遇灰尘及污渍较多时,不得不采用人工反复取下机器、喷洒净水、不停湿润抹布,人工去控制喷洒剂量很难保证精确,剂量过小导致抹布湿润不到位清洁程度低,剂量过大容易造成积水在玻璃或墙上,导致粘附到机器履带上造成打滑,而且反复取放操作极为繁琐,尤其是机器在位置较高、外墙玻璃处人工反复取放更为不易。
7.3、市面上有的机器采用外置一个或两个喷嘴,通过超声波雾化喷洒净水在玻璃窗或墙面上,其湿润的面积有限,效果较差。尤其是在高层外墙玻璃上有风时,喷嘴雾化喷洒的水被风刮走或者直接蒸发,达不到湿润抹布的效果。
技术实现要素:
8.本发明的目的在于提供一种清洁机器人,旨在解决现有技术中清洁机器人在清理玻璃或墙面时存在容易打滑、难以高效清洁重污渍的问题。
9.本发明是这样实现的,提供清洁机器人,用于清洁目标表面,包括用于沿所述目标表面移动的行走单元、用于负压吸附于所述目标表面的吸盘单元、用于清洁所述目标表面的清洁单元,所述清洁单元包括水泵、多个喷孔以及擦拭布;所述擦拭布设有凹腔,所述多个喷孔位于所述凹腔内,所述水泵出水管连接至所述多个喷孔。
10.与现有技术相比,本发明中的清洁机器人在进行清洁时,从多个喷孔中将净水或清洁剂喷出至内腔,由于清洁机器人吸附于所述目标表面,凹腔构成相对隔绝的密闭空间,液体不会泄露至擦拭布外,该密封空间也不受环境影响,液体喷洒至目标表面后不会被风干。在清洁机器人行进的过程中,擦拭布从密封空间内获取液体进行清洁,能够喷洒适量的
液体充分清洁严重的污渍灰尘。由于擦拭布的密封作用,液体不会泄露至清洁机器人的履带上,从而在保证清洁效果的前提下,有效的避免了清洁机器人打滑、甚至掉落的问题。
附图说明
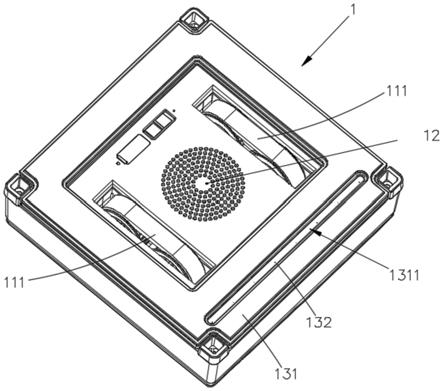
11.图1为本发明实施例提供的清洁机器人的立体示意图;
12.图2为本发明实施例提供的清洁机器人的结构爆炸示意图。
具体实施方式
13.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
14.以下结合具体附图对本实施例的实现进行详细的描述。
15.如图1和图2所示,本实施例中提供了清洁机器人1,用于清洁目标表面,目标可以为玻璃、瓷砖等相对光滑的表面,为了便于叙述,将清洁机器人1朝向目标表面的端面称为内端面。
16.清洁机器人1包括用于沿目标表面移动的行走单元、用于负压吸附于目标表面的吸盘单元12、用于清洁目标表面的清洁单元13。通过吸盘单元12将请机器人1吸附在目标表面,通过行走单元驱动清洁机器人1移动。
17.清洁单元13包括水泵134、擦拭布131和用于喷洒净水或清洁剂的有多个喷孔132。擦拭布131设有凹腔1311,目标表面和凹腔1311共同围合构成一密封空间,在吸盘单元12的作用下,擦拭布131紧紧贴设至目标端面,将凹腔1311与外部隔绝。多个喷孔132即位于凹腔1311内,水泵134的出水管连接至多个喷孔132。
18.清洁机器人1在进行清洁时,水泵134输送净水或清洁剂从有多个喷孔132中将喷出至凹腔1311,由于该区域相对隔绝,液体不会泄露至擦拭布131外,该密封空间也不受环境影响,液体喷洒至目标表面后不会被风干。在清洁机器人1行进的过程中,擦拭布131从凹腔1311,内获取液体进行清洁,能够喷洒适量的液体充分清洁严重的污渍灰尘。由于擦拭布131的密封作用液体不会泄露至清洁机器人1的履带上,从而在保证清洁效果的前提下,有效的避免了清洁机器人1打滑、甚至掉落的问题。
19.优选的,清洁单元13还包括设置于清洁机器人1内部的喷洒液体装置,喷洒液体装置设有用于容纳液体的水箱133,水泵134的进水管连接至水箱133进行取水或清洁剂。在水泵134的作用下,将水箱133内的液体从有多个喷孔132喷洒至目标表面。
20.优选的,在凹腔1311底部安装有条形件1312,其沿着凹腔1311的延伸方向延伸,覆盖图1所示中凹腔1311的底部,多个喷孔132即开设在条形件1312上。条形件1312可以采用不锈钢、铝合金、塑钢等材料制成,具有一定的防腐蚀性,并且安装固定至清洁机器人1的底盘。
21.优选的,清洁单元3还包括用于检测水箱中液体情况的液面传感器,反馈液面情况,在液面过低时停止水泵134。
22.优选的,清洁机器人1还包括语音提示单元,通过语音的方式提示用户。例如检测到水箱中液面较低,语音提示单元发出语音“水箱水量不足,请添加”,提示用户进行相关操
作。出现故障发生,语音提示具体故障原因,例如“电池电量低,请充电”,“轮子卡住,请清理轮子”等,让用户能轻易识别故障原因。
23.如图2所示,清洁机器人1内设有主控电路板15,在主控电路板15上设有cpu单元,用于自动化、智能化的控制清洁机器人1的相关动作。
24.优选的,行走单元包括两驱动轮组件111和用于改变两驱动轮组件转速的调速单元以及相关的变速箱,两驱动轮组件111同步转动时即直线移动,异步转动时可以实现弧线行进的行走,也即转弯。驱动轮组件111可以包括一个或多个驱动轮,本实施中的各驱动轮组件111包括两个驱动轮,通过履带同步并实现行进。
25.优选的,行走单元还包括测速电路,测速电路测定速度反馈至cpu单元,cpu输出指令控制行走调速单元,最终实现清洁机器人1按照软件路径行走,对目标表面进行充分清洁。
26.优选的,如图1和图2所示,吸盘单元12包括塑胶腔体122(图示中具有多个成圆形分布孔洞的结构)、风机121、风机调速单元以及气压传感器,风机121转动实现塑胶腔体122内部的负压,将清洁机器人1吸附至目标表面。气压传感器反馈负压到cpu单元,cpu单元输出指令控制风机调速单元。cpu单元可以根据预设的软件程序,调节合适的压强以适应不同的目标表面所需摩擦力,自动调节风机调速单元。
27.优选的,清洁机器人1还包括用于检测目标表面边界的测距传感器14和用于判断朝向以及与边界平面夹角的六轴传感器。当测距传感器14检测到一定范围内存在目标表面边界时,反馈边界距离和方向,六轴传感器反馈清洁机器人1此时的朝向以及与所探测到的目标表面边界所在平面之间的夹角,信息反馈至cpu单元后,通过清洁机器人1此时的朝向判断是否需要转弯避让目标表面边界,或者是否能够直接移动至目标表面边界所在平面,智能化的规划路线。
28.优选的,清洁机器人1还包括无线接收模块和遥控器,便于用户远程操作。遥控器上可以设置以下功能:前进/后退/左转/右转、减速、加速、启动/停止、干擦(无喷水)、湿擦(喷水)、喷洒开/关、语音开/关等,实现远程操作。
29.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1