盒体组件及清洁机器人及清洁机器人系统的制作方法
1.本发明涉及一种盒体组件及清洁机器人及清洁机器人系统,属于清洁机器人领域。
背景技术:
2.智能扫地机技术随着智能家居行业的发展不断提升,市场对智能扫地机的多样性要求也越来越高。传统智能扫地机的盒体组件容量较小,经常工作一段时间就要取出盒体组件倒垃圾。因此往往需要设计一款可以回收垃圾的大容量的充电座,通过扫地机自动回收垃圾功能来解决人工频繁倒垃圾的问题。然而,相关技术中的扫地机在通过充电座回收盒体组件内的垃圾时,容易由于盒体组件内难以产生可以让盒体组件内垃圾顺畅进入回收站的负压差而导致在盒体组件内残留垃圾,进而导致盒体组件内的垃圾不能顺利回收到回收站。
技术实现要素:
3.本发明提供一种盒体组件及清洁机器人及清洁机器人系统。
4.本发明实施方式的盒体组件包括盒体和导风件,所述导风件能够运动地设置于盒体,所述盒体内形成有容纳腔,所述盒体包括能够使气流进入所述容纳腔的垃圾入口,所述盒体包括能够使气流流出所述容纳腔的垃圾出口,所述导风件相对所述垃圾出口靠近所述垃圾入口设置。所述导风件被配置成能够相对所述盒体运动,以减小所述垃圾入口的开口面积,或者,以在所述容纳腔内限定出连接所述垃圾入口的导流通道,且使所述导流通道的导出口的开口面积小于所述垃圾入口的开口面积。
5.本发明的盒体组件能够应用于清洁机器人(例如扫地机器人或拖地机器人或扫拖一体机器人),在清洁机器人为扫地机器人或拖地机器人或扫拖一体机器人时,清洁机器人行走在待清洁地面上,在吸力作用下(可由风机提供)能够将带有垃圾(包括灰尘)的气流通过盒体的垃圾入口吸入盒体内(容纳腔内),并能够将经过过滤后的(可通过过滤元件实现,例如海帕)的气流经由出风口排出。过滤的垃圾能够储存于容纳腔内,以实现对待清洁地面的清洁。在需要通过回收站(充电座)回收盒体内的垃圾时,可使导风件相对盒体运动,以达到减小垃圾入口的开口面积,或者使导风件相对盒体运动以形成导流通道,这样能够使容纳腔与外界环境之间产生较大的负压差。容纳腔与外界环境之间产生的较大的负压差使得盒体组件内垃圾能够通过垃圾出口顺畅进入回收站内,保证了盒体组件内的垃圾能顺利回收到回收站。
6.在某些实施方式中,所述导风件可转动地设置于所述容纳腔内,所述导风件相对所述垃圾入口转动,以在所述容纳腔内限定出连接所述垃圾入口的所述导流通道。
7.在某些实施方式中,所述导风件可转动地设置于所述垃圾入口内侧,所述导风件开设有导入口,所述导风件能够相对所述垃圾入口在第一位置及第二位置之间转动。在所述导风件转动至所述第一位置时,所述导入口的位置与所述垃圾入口的位置对应,在所述
导风件转动至所述第二位置时,所述导风件与所述容纳腔的侧壁共同限定出所述导流通道,所述导入口处于关闭状态。
8.在某些实施方式中,所述盒体组件包括止逆件,所述止逆件可转动地设置于所述导风件上,在所述导风件转动至所述第一位置时,所述止逆件能够在进入所述垃圾入口内的气流的作用下打开所述导入口,并能够在所述止逆件的重力作用下关闭所述导入口,在所述导风件转动至所述第二位置时,所述止逆件能够在外力的作用下关闭所述导入口;和/或,
9.所述盒体组件包括设置于所述容纳腔内的挡件,在所述导风件转动至所述第二位置时,所述导风件抵持所述挡件,以停留在所述第二位置,所述止逆件抵持于所述导风件和所述挡件之间;和/或,
10.所述导风件相对所述垃圾入口由所述第一位置转动一预设锐角以到达至所述第二位置。
11.在某些实施方式中,所述导风件被配置成能够相对所述盒体运动,以在所述容纳腔内限定出所述导流通道,所述导流通道包括连接所述导出口的渐缩通道段,所述渐缩通道段的气体流通截面积向所述导出口方向呈渐缩变化;和/或,
12.所述盒体包括连接的第一壳体及第二壳体,所述第一壳体形成所述容纳腔,所述第一壳体开设有所述垃圾入口及所述垃圾出口,所述第二壳体内形成有连通所述容纳腔的过滤腔,所述导风件可转动地设置于所述第一壳体,以在所述容纳腔内限定出连接所述垃圾入口的所述导流通道。
13.在某些实施方式中,所述导风件被配置成能够相对所述盒体运动,以在所述容纳腔内限定出所述导流通道,所述垃圾入口的位置高于所述导出口的位置,所述导流通道形成有向所述容纳腔的底面倾斜的第一导流面,所述第一导流面连接所述导流通道的导出口。
14.在某些实施方式中,所述导风件形成所述第一导流面,所述第一导流面与所述容纳腔的底面之间形成所述导出口,所述容纳腔的底面开设有贯穿所述底面的所述垃圾出口,所述导出口位于所述垃圾入口及所述垃圾出口之间;和/或,
15.所述盒体组件包括盖板,所述盖板可转动地设置于所述盒体以打开或关闭所述垃圾出口,在所述盖板打开所述垃圾出口时,所述盖板朝向所述垃圾出口的一侧形成有向下倾斜的第二导流面。
16.在某些实施方式中,所述盒体组件包括滑动件,所述滑动件连接所述导风件,所述滑动件能够在外力的作用下相对所述盒体滑动,以驱动所述导风件相对所述盒体运动。
17.在某些实施方式中,所述盒体组件包括弹性件,所述弹性件的一端固定在所述盒体,所述弹性件的另一端连接所述滑动件,所述滑动件能够在外力的作用下相对所述盒体在第三位置及第四位置之间滑动,以驱动所述导风件相对所述盒体运动。在所述滑动件由所述第三位置向所述第四位置滑动时,所述弹性件在所述滑动件的作用下受力而收缩。收缩的所述弹性件能够驱动所述滑动件由所述第四位置滑动至所述第三位置。
18.本实施方式的清洁机器人包括机体和上述任一实施方式所述的盒体组件,所述盒体组件安装于所述机体。
19.本发明的清洁机器人中,在清洁机器人为扫地机器人或拖地机器人或扫拖一体机
器人时,清洁机器人行走在待清洁地面上,在吸力作用下(可由风机提供)能够将带有垃圾(包括灰尘)的气流通过盒体的垃圾入口吸入盒体内(容纳腔内),并能够将经过过滤后的(可通过过滤元件实现,例如海帕)的气流经由出风口排出。过滤的垃圾能够储存于容纳腔内,以实现对待清洁地面的清洁。在需要通过回收站(充电座)回收盒体内的垃圾时,可使导风件相对盒体运动,以达到减小垃圾入口的开口面积,或者使导风件相对盒体运动以形成导流通道,这样能够使容纳腔与外界环境之间产生较大的负压差。容纳腔与外界环境之间产生的较大的负压差使得盒体组件内垃圾能够通过垃圾出口顺畅进入回收站内,保证了盒体组件内的垃圾能顺利回收到回收站。
20.本实施方式的清洁机器人系统包括回收站和上述任一实施方式所述的清洁机器人,所述回收站内形成有用于回收垃圾的回收腔,所述回收站设置有驱动件,所述盒体设置有受驱动件。所述机体朝向所述回收站移动时,所述驱动件能够驱动所述受驱动件移动,以驱动所述导风件相对所述盒体运动。
21.本发明的清洁机器人系统中,在清洁机器人为扫地机器人或拖地机器人或扫拖一体机器人时,清洁机器人行走在待清洁地面上,在吸力作用下(可由风机提供)能够将带有垃圾(包括灰尘)的气流通过盒体的垃圾入口吸入盒体内(容纳腔内),并能够将经过过滤后的(可通过过滤元件实现,例如海帕)的气流经由出风口排出。过滤的垃圾能够储存于容纳腔内,以实现对待清洁地面的清洁。在需要通过回收站(充电座)回收盒体内的垃圾时,可使导风件相对盒体运动,以达到减小垃圾入口的开口面积,或者使导风件相对盒体运动以形成导流通道,这样能够使容纳腔与外界环境之间产生较大的负压差。容纳腔与外界环境之间产生的较大的负压差使得盒体组件内垃圾能够通过垃圾出口顺畅进入回收站内,保证了盒体组件内的垃圾能顺利回收到回收站。
22.本发明实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
23.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需的附图作简单介绍,显然,下面描述中的附图只是本发明实施例的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,所获得的其他实施例附图应当包含在本发明的技术方案中。
24.图1是本发明实施方式的清洁机器人系统的立体示意图;
25.图2是本发明实施方式的清洁机器人系统的分解示意图;
26.图3是本发明实施方式的盒体组件的立体示意图;
27.图4是本发明实施方式的盒体组件的分解示意图;
28.图5是本发明实施方式的盒体组件的部分分解示意图;
29.图6是本发明实施方式的盒体组件的剖面示意图;
30.图7是本发明实施方式的盒体组件的另一剖面示意图;
31.图8是本发明实施方式的盒体组件的又一剖面示意图;
32.图9是本发明实施方式的盒体组件的再一剖面示意图;
33.图10是本发明实施方式的盒体组件的第二壳体的剖面示意图;
34.图11是本发明实施方式的盒体组件的滑动件驱动导风件运动的示意图。
35.清洁机器人系统300;
36.清洁机器人100;
37.盒体组件10、盒体11、容纳腔111、垃圾入口112、垃圾出口113、容纳子腔114、顶面115、底面116、侧面117、导风件12、导流通道121、渐缩通道段1211、导出口122、导入口123、第一导流面124、转轴125、受驱动端126、扭簧127、滑动件13、第一滑动件131、第二滑动件132、滑槽133、驱动端134、挡件14、止逆件140、盖板15、第二导流面151、限位件16、第一壳体17、第二壳体18、过滤腔181、弹性件19;
38.机体20;
39.回收站200、驱动件210、定位柱211、下表面220。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一个实施例,而并非全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.请结合图1至图2。本发明实施方式的盒体组件10用于清洁机器人100。清洁机器人100可以为扫地机器人或拖地机器人或扫拖一体机器人。在清洁机器人100为扫地机器人或拖地机器人或扫拖一体机器人时,清洁机器人100行走在待清洁地面上,并可实现对待清洁面的清洁。上述的清洁机器人100能够用于本实施方式中的清洁机器人系统300。清洁机器人系统300包括回收站200。
42.需要说明的是,清洁机器人100在待清洁面的行走可通过轮组装置实现。轮组装置可安装于机体20的底部。轮组装置的具体结构可参考现有相关技术,例如可两驱动轮和一万向轮,两驱动轮可分别设置在机体中心部位的两侧。万向轮可设置在机体上。当清洁机器人处于水平地面时,万向轮和两驱动轮接触地面,以带动机器人在待清洁地面实现行走。具体在此不再详述。
43.请一并结合图3至图11,本实施方式的盒体组件10包括盒体11和导风件12。导风件12能够运动地设置于盒体11。盒体11内形成有容纳腔111。盒体11包括能够使气流进入容纳腔111的垃圾入口112。盒体11包括能够使气流流出容纳腔111的垃圾出口113。导风件12相对垃圾出口113靠近垃圾入口112设置。导风件12被配置成能够相对盒体11运动。需要说明的是上述的气流可以携带垃圾(包括灰尘及颗粒杂质等)。可以理解,携带有垃圾或不携带有垃圾的气流可通过垃圾入口112进入容纳腔111内,而携带有垃圾或不携带有垃圾的气流可通过垃圾出口113流出容纳腔111。
44.需要说明的是,导风件12相对盒体11运动的方式可根据具体情况进行设置。导风件可以相对盒体滑动。当然,可以理解,导风件也可以相对盒体转动。另外,导风件12的结构可根据具体情况进行设置。例如,导风件12可设置为板状结构。另外,可通过外力驱使导风件12相对盒体11运动。
45.在一些实施方式中,导风件被配置成能够相对盒体运动,以改变垃圾入口的开口面积。例如,可将导风件设置于垃圾入口处,使导风件相对垃圾入口移动以增大或减小垃圾
入口的开口面积。可以理解,导风件可通过移动以覆盖垃圾入口的部分开口以减小垃圾入口的开口面积。在垃圾入口的开口面积减小时,容纳腔与外界环境之间能够产生较大的负压差。例如,在垃圾入口的开口面积减小时,这时通过风机从垃圾出口不断抽气工作(这样利于降低垃圾出口附近的压强)时,容纳腔与外界环境之间能够产生较大的负压差。
46.在一些实施方式中,导风件12被配置成能够相对盒体11运动,以在容纳腔111内限定出连接垃圾入口112的导流通道121(见图8),且使导流通道121的导出口122的开口面积小于垃圾入口112的开口面积。如此,气流由垃圾入口112进入导流通道121内,并能够在导流通道121的导向作用下由导出口122导出导流通道121。这样容纳腔与外界环境之间能够产生较大的负压差。可以理解,可将导出口122设置呈狭缝状,以提高由导出口122流出的气流的速度(气流可由导出口喷射出),并有效增大容纳腔与外界环境之间的负压差值。
47.在本实施方式中,在导风件12相对盒体11运动并在容纳腔111内限定出连接垃圾入口112的导流通道121时,容纳腔111内形成有容纳子腔114。容纳子腔114连通导出口122及垃圾出口113。这时气流能够将导流通道121内的垃圾通过导出口122导出至容纳子腔114。这样通过风机从垃圾出口不断往容纳腔外抽气工作时,容纳子腔114内与外界环境之间能够产生较大的负压差。这样气流能够将容纳子腔114内的垃圾由垃圾出口113顺畅导出(回收)。
48.本发明的盒体组件10能够应用于清洁机器人100(例如扫地机器人或拖地机器人或扫拖一体机器人),在清洁机器人100为扫地机器人或拖地机器人或扫拖一体机器人时,清洁机器人100行走在待清洁地面上,在吸力作用下(可由风机提供)能够将带有垃圾(包括灰尘)的气流通过盒体11的垃圾入口112吸入盒体11内(容纳腔111内),并能够将经过过滤后的(可通过过滤元件实现,例如海帕)的气流经由出风口排出。过滤的垃圾能够储存于容纳腔111内,以实现对待清洁地面的清洁。在需要通过清洁机器人系统的回收站(充电座)回收盒体11内的垃圾时,可使导风件12相对盒体11运动,以达到减小垃圾入口112的开口面积,或者使导风件12相对盒体11运动以形成导流通道121,这样能够使容纳腔111与外界环境之间产生较大的负压差。容纳腔111与外界环境之间产生的较大的负压差使得盒体组件10内垃圾能够通过垃圾出口113顺畅进入回收站内,保证了盒体组件10内的垃圾能顺利回收到回收站。
49.请结合图1至图2。本发明实施方式的清洁机器人系统300包括回收站200和清洁机器人100。回收站200内形成有用于回收垃圾(包括灰尘)的回收腔(图未示出)。在一些实施方式中,回收站200设置有驱动件210。盒体11设置有受驱动件。机体20朝向回收站200移动时,驱动件210能够驱动受驱动件移动,以驱动导风件12相对垃圾入口112运动。在需要将容纳腔111内的垃圾回收至回收腔时,可使机体20朝回收站200移动。这样驱动件210能够驱动受驱动件移动,以驱动导风件12相对盒体11运动,以达到减小垃圾入口的开口面积,或者使导风件12相对垃圾入口112运动以形成导流通道121。
50.本实施方式的清洁机器人系统中,回收站200为座体结构。回收站200还具有充电的功能。驱动件210为凸设于座体结构的下表面220上的柱体结构。受驱动件为能够相对盒体11滑动的滑动件13。驱动件210能够驱动受驱动件相对盒体11滑动,以驱动导风件12相对垃圾入口112运动。这样能够通过较简单的驱动方式实现导风件的运动,并能够在保障实现导风件的运动的条件下使清洁机器人的整体结构较为简单。需要说明的是,滑动件与驱动
件的配合方式将在后续实施方式中进一步展述。下文的实施方式将围绕盒体组件的结构进行展开。
51.在某些实施方式中,导风件12可转动地设置于容纳腔111内。导风件12相对垃圾入口112转动,以在容纳腔111内限定出连接垃圾入口112的导流通道121。如此,这样易于导流通道121的形成。
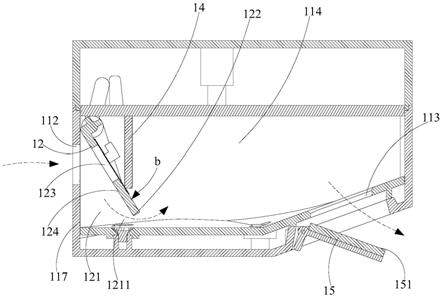
52.请结合图6至图9,在一些实施方式中,导风件12可转动地设置于垃圾入口112内侧。导风件12开设有导入口123。导风件12能够相对垃圾入口112在第一位置a及第二位置b之间转动。在导风件12转动至第一位置a时,导入口123的位置与垃圾入口112的位置对应。在导风件12转动至第二位置b时,导风件12与容纳腔111的侧壁共同限定出导流通道121,导入口123处于关闭状态。
53.需要说明的是,在导风件12转动至第一位置a时,在导入口123处于打开状态时,气流可依次经由垃圾入口112及导入口123而进入容纳腔111内;在导入口123处于关闭状态时,可防止容纳腔111内的垃圾(包括灰尘)经由导入口123从垃圾入口112流出。在导风件12转动至第二位置b时,气流可依次经由垃圾入口112及导入口123而进入导流通道121,并经导出口122导出容纳腔111。由于此时导入口123处于关闭状态,这样可保证进入导流通道121的气流由导出口122导出。
54.另外,需要说明的是,上述中的“导风件12与容纳腔111的侧壁共同限定出导流通道121”中的容纳腔111的侧壁可以包括容纳腔的顶壁、侧面壁及底壁中的一个壁或多个壁。在本实施方式中,容纳腔111的侧壁包括侧面壁及底壁。
55.可以理解,导风件12相对垃圾入口112在第一位置a及第二位置b之间转动的角度可根据具体情况进行设置。例如,导风件12能够相对垃圾入口112由第一位置a转动一预设锐角以到达至第二位置b。这样导风件12相对垃圾入口112转动的幅度较小,易于实现。其中,预设锐角可根据具体情况设置,例如可为15度、20度、30度或45度等。
56.在一些例子中,垃圾入口112开设于容纳腔111的侧面壁上(图示中的垃圾入口112贯穿侧面壁的侧面117)。导风件12的一端可转动地设置于容纳腔111的侧壁(侧壁可以为容纳腔的侧面壁或者顶壁)上并位于垃圾入口112内侧的上端,导风件12的另一端向下延伸。在导风件12相对垃圾入口112由第一位置a转动至第二位置b的过程中,导风件12的另一端朝远离垃圾入口112方向转动。
57.在一些实施方式中,盒体组件10包括止逆件140。止逆件140可转动地设置于导风件12上。在导风件12转动至第一位置a时,止逆件140能够在进入垃圾入口112内的气流的作用下打开导入口123,并能够在止逆件140的重力作用下关闭导入口123。在导风件12转动至第二位置b时,止逆件140能够在外力的作用下关闭导入口123。如此,在导风件12转动至第一位置a时,止逆件140的设置能够有效防止容纳腔111内的垃圾(包括灰尘)经由导入口123而从垃圾入口112流出。在导风件12转动至第二位置b时,止逆件140的设置能够有效防止导流通道121内的气流从导入口123流出。
58.可以理解,止逆件140的结构可根据具体情况进行设置。在本实施方式中,止逆件140为板状结构。导风件12为板状结构。导风件12的重量大于导风件12的重量。在导风件12处于第一位置a时,导风件12能够在自身的重力作用下使导风件12的一侧面贴合于容纳腔111的侧面壁。导风件12能够在自身的重力作用下基本呈竖直状态。导入口123的位置与垃
圾入口112的位置对应。止逆件140能够在自身的重力作用下基本呈竖直状态,并关闭导入口123。在气流进入垃圾入口112内后,气流能够推动止逆件140相对导入口123转动以打开导入口123。在导风件12相对垃圾入口112由第一位置a转动至第二位置b的过程中,导风件12及止逆件140能够相对垃圾入口112向容纳腔111内侧转动,以在容纳腔111内限定出连接垃圾入口112的导流通道121。
59.另外,需要说明的是,上述的“止逆件140能够在外力的作用下关闭导入口123”中的外力可由设置在盒体11上的零部件实现。例如,可在容纳腔内设置一档杆或挡板,通过档杆或挡板抵持止逆件,以使止逆件在导风件转动至第二位置时能够关闭导入口。
60.在一些实施方式中,盒体组件10包括设置于容纳腔111内的挡件14。在导风件12转动至第二位置b时,导风件12抵持挡件14,以停留在第二位置b。止逆件140抵持于导风件12和挡件14之间。如此,在导风件12转动至第二位置b时,抵持于导风件12和挡件14之间的止逆件140受力而关闭导入口123。导风件12与止逆件140能够构成一个整体结构(类似斜挡墙)。上述整体结构与容纳腔的底壁共同限定出上述的导流通道。
61.在本实施方式中,挡件14自容纳腔111的顶面115向容纳腔111的底面116延伸(可以理解,容纳腔的顶壁可以包括顶面115,而容纳腔的底壁可以包括底面116)。挡件14为板状结构。挡件14位于垃圾入口112和垃圾出口113之间。挡件14和容纳腔111的底面116之间留有间隙。导风件12位于挡件14和垃圾入口112之间。在导风件12转动至第二位置b时,导风件12的一端向下倾斜地伸入上述间隙中并抵持挡件14。上述的导风件12的一端与容纳腔111的底面116共同限定出导出口122。
62.在某些实施方式中,导风件12被配置成能够相对盒体11运动,以在容纳腔111内限定出连接垃圾入口112的导流通道121。导流通道121包括连接导出口122的渐缩通道段1211。渐缩通道段1211的气体流通截面积向导出口122方向呈渐缩变化。渐缩通道段1211的设置利于提高由导出口122喷出的气流的流速,并利于降低导出口122附近的压强。这样利于增大容纳腔111与外界环境之间的负压差值。
63.可以理解,在需要排出容纳腔111内收集的垃圾(收至回收站),并通过抽气装置(风机或抽风机)往容纳腔外抽气时(可通过垃圾出口)时,可使得渐缩通道段1211的气流横截面积小于抽气装置所在的风道的气流横截面积,这样利于在容纳腔与外界环境之间形成较大的负压差值。
64.在某些实施方式中,盒体11包括连接的第一壳体17及第二壳体18。第一壳体17形成容纳腔111。第一壳体17开设有垃圾入口112及垃圾出口113。第二壳体18内形成有连通容纳腔111的过滤腔181。导风件12可转动地设置于第一壳体17,以在容纳腔111内限定出连接垃圾入口112的导流通道121。
65.可以理解,过滤腔181内可以设置用于过滤的过滤元件(例如海帕等)。第二壳体18还可开设连通过滤腔181的出风口。这样携带有垃圾的气流由垃圾入口112进入容纳腔111内后,经过过滤腔181内过滤元件过滤垃圾后,能够由出风口排出。另外,导风件12转动设置于第一壳体17的方式易于在容纳腔111内限定出上述的导流通道121。在本实施方式中,导风件12通过转轴125可转动地设置于第一壳体17。
66.在某些实施方式中,导风件12被配置成能够相对盒体11运动,以在容纳腔111内限定出连接垃圾入口112的导流通道121。垃圾入口112的位置高于导出口122的位置。导流通
道121形成有向容纳腔111的底面116倾斜的第一导流面124。第一导流面124连接导流通道121的导出口122。如此,在需要通过回收站(充电座)回收盒体内的垃圾时,可打开垃圾入口112,这样气流可由垃圾入口112进入导流通道121。第一导流面124能够促使气流改变流动方向,并能够促使由导出口122流出的气流贴着容纳腔111底部流动且在容纳腔111内产生涡流(气流的流动如图8的虚线箭头所示),继而能够有效减小带有垃圾的气流从垃圾出口113导出的阻力,保证了盒体组件10内的垃圾能顺利回收到回收站。
67.需要说明的是,上述的“垃圾入口112的位置高于导出口122的位置”指的是在清洁机器人正常工作时垃圾入口112的海拔高度高于导出口122的海拔高度。可以理解,上述的第一导流面的至少部分可以构成上述的渐缩通道段的内侧面。
68.在某些实施方式中,导风件12形成第一导流面124。第一导流面124与容纳腔111的底面116之间形成导出口122。容纳腔111的底面116开设有贯穿底面116的垃圾出口113。导出口122位于垃圾入口112及垃圾出口113之间。如此,这样利于在容纳腔内产生涡流。这样由垃圾入口112进入容纳腔111内的气流能够更顺畅地携带垃圾由垃圾出口113流出容纳腔111。
69.可以理解,垃圾出口113的位置也可设置得低于垃圾入口112的位置。在图示示例(图8及图9)中,导出口122的开口面积小于垃圾出口113的开口面积。
70.在某些实施方式中,盒体组件10包括盖板15。盖板15可转动地设置于盒体11以打开或关闭垃圾出口113。在盖板15打开垃圾出口113时,盖板15朝向垃圾出口113的一侧形成有向下倾斜的第二导流面151。
71.在需要通过容纳腔111收集垃圾时,可使盖板15关闭垃圾出口113,并可打开垃圾入口112,以使气流携带垃圾由垃圾入口112进入容纳腔111内。在需要排出容纳腔111内收集的垃圾时,可转动以打开盖板15,并可通过风机或抽风机往外抽气,这样气流由导流通道121进入容纳腔111内,并能够顺畅地携带容纳腔111内的垃圾由垃圾出口113流出(可回收至回收站)。其中,第二导流面151具有导向气流的作用,并能够减小携带有垃圾的气流由垃圾出口113流出的阻力。
72.在某些实施方式中,盒体组件10包括滑动件13。滑动件13连接导风件12。滑动件13能够在外力的作用下相对盒体11滑动,以驱动导风件12相对盒体11运动。
73.在本实施方式中,滑动件13能够在外力的作用下相对盒体11滑动,以驱动导风件12相对盒体11转动。滑动件的设置能够简化驱动导风件运动的方式。在图示示例总,滑动件1能够滑动地设置于第一壳体17,并位于容纳腔111外。
74.在图1及图2所示的例子中,清洁机器人系统300包括回收站200。回收站200为座体结构。回收站具有主体结构(可参考上文的实施方式)。柱体结构包括间隔设置的两个定位柱211。滑动件包括间隔设置的第一滑动件131和第二滑动件132。两个定位柱211能够分别与第一滑动件131和第二滑动件132配合,以驱动导风件12相对垃圾入口112转动。机体20朝向回收站200移动时,两个定位柱211能够同时分别驱动第一滑动件131和第二滑动件132滑动,以驱动导风件12相对垃圾入口112运动。这样能够提高通过滑动的滑动件驱动导风件12转动的稳定性。
75.请结合图7及图9,在某些实施方式中,盒体组件10包括弹性件19。弹性件19的一端固定在盒体11。弹性件19的另一端连接滑动件13。滑动件13能够在外力的作用下相对盒体
11在第三位置c及第四位置d之间滑动,以驱动导风件12相对盒体11运动。在滑动件13由第三位置c向第四位置d滑动时,弹性件19在滑动件13的作用下受力而收缩。收缩的弹性件19能够驱动滑动件13由第四位置d滑动至第三位置c。弹性件19的设置能够提高通过滑动的滑动件驱动导风件12转动的稳定性。
76.可以理解,可通过限位件16将滑动件限定在第三位置c及第四位置d之间滑动。
77.在本实施方式中,弹性件19包括第一弹性件和第二弹性件。第一弹性件的一端固定在盒体11。第一弹性件的另一端连接第一滑动件131。第二弹性件的一端固定在盒体11。第二弹性件的另一端连接第二滑动件132。每个滑动件通过间隔设置的两个限位件限定在第三位置c及第四位置d之间滑动。其中,两个弹性件均可以为弹簧。
78.在图示示例中,两个限位件16间隔设置在每个滑动件的滑槽133。每个滑动件还形成有驱动端134。导风件12通过转轴125转动连接于第一壳体17。转轴125的端部还设置有受驱动端126。转轴125的端部还套设有扭簧127。滑动的滑动件能够通过驱动端134驱动受驱动端126转动。根据杠杆原理,扭簧127的扭力能够驱动导风件12相对垃圾入口112向容纳腔内转动。
79.在本实施方式中,在机体向回收站移动时,定位柱211施加在滑动件上的推力克服弹性件对滑动件的弹力,使各个滑动件产生滑动。滑动件滑动的同时会推动导风件12,促使导风件12绕转轴125转动(可通过杠杆原理实现)。当滑动件停止运动时(由限位件实现),止逆件140抵持于导风件12和挡件14之间并关闭导入口123。导风件12与止逆件140能够构成一个整体结构(类似斜挡墙)。该整体结构的底部与容纳腔的底面之间狭缝状的通道(该通道可为上述的渐缩通道段)。该通道构成导流通道的部分。该通道的出口即为导出口122。气流从垃圾入口112进入导流通道121内,在斜挡墙的导向作用下贴着容纳腔底部流过该通道,而由于该通道的横截面积小于抽风装置所在的风道的横截面积,随着抽风装置不断的抽气工作,容纳腔111与外界大气之间能够产生较大的负压差值,使盒体11内的垃圾能够顺利进入回收站内(气流的流动如图8的虚线箭头所示)。在机体离开回收站时,导风件12能够在扭簧的弹力作用下回到原处(如上述的第一位置),而滑动件能够在弹性件的弹力作用下回到原处(如上述的第三位置c)。
80.公开的实施例仅为本发明具体实施例而已,是为了清楚说明本发明的举例,而不应当视为对本发明的范围限定,当然也不能以此来限定本发明之权利要求范围,对于本领域技术人员来说,依本发明权利要求所作的等同变化、修改、变动等,仍属本发明所涵盖的范围,应当包含在本发明的权利要求保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1