一种人体行为仿生摆动系统的制作方法
[0001]
本发明涉及行为仿生技术领域,具体为一种人体行为仿生摆动系统。
背景技术:
[0002]
婴儿是指小于1周岁的儿童。婴儿在这个阶段生长发育特别迅速,是人一生中生长发育最旺盛的阶段,体重大约为9000~10000克。婴儿足月出生时已具有较好的吸吮吞咽功能,颊部有坚厚的脂肪垫,有助于吸吮活动,早产儿则较差。吸吮动作是复杂的天性反射,严重疾病可影响这一反射,使吸吮变得弱而无力。但是婴儿在睡觉时需要父母哄着睡,而且很容易哭闹,目前现有的婴儿摇床不能模拟出父母用手摇晃的真实感觉。
技术实现要素:
[0003]
针对现有技术的不足,本发明提供了一种人体行为仿生摆动系统,解决了目前现有的婴儿摇床不能模拟出父母用手摇晃的真实感觉的问题。
[0004]
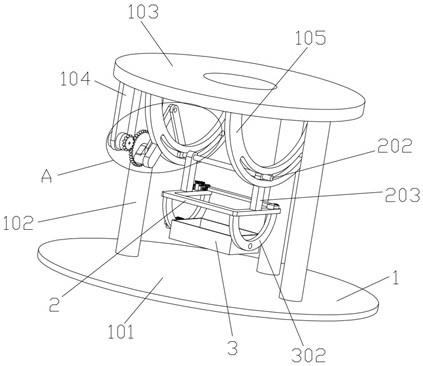
为实现上述目的,本发明提供如下技术方案:一种人体行为仿生摆动系统,包括摇摆模块、安全模块和调节模块,所述的摇摆模块包括底板、顶板支撑杆、顶板、摇摆电机支架、摇摆弧形架、摇摆主动齿轮、摇摆电机、摇摆从动齿轮、摇摆臂、推动臂、摇摆从动齿轮支架和摇摆臂支架,所述底板上方通过顶板支撑杆固定连接有顶板,顶板的下表面固定连接有两个摇摆弧形架。
[0005]
所述的安全模块包括弓形架、摆动轴、弓形架支架、稳定杆支架、稳定杆、锁定齿轮、锁定电机支架、固定齿轮、固定齿轮支架、锁定中间从动齿轮、锁定中间齿轮支架、锁定主动齿轮、锁定中间主动齿轮和锁定电机,两个所述摇摆弧形架的相对面之间通过摆动轴滑动连接有两个弓形架支架,两个所述弓形架支架的底端固定连接有弓形架。
[0006]
所述的调节模块包括放置盒、放置盒支架、调节摩擦轮、固定轴、螺钉支架和螺钉,所述弓形架的下方通过放置盒支架活动连接有放置盒。
[0007]
优选的,所述摆动轴的一端活动连接有推动臂,推动臂远离摆动轴的一端活动连接有摇摆臂,摇摆臂远离推动臂一端与摇摆弧形架通过摇摆臂支架活动连接。
[0008]
优选的,所述摇摆臂远离推动臂一端的侧方通过连接轴固定连接有摇摆从动齿轮,所述摇摆从动齿轮和摇摆臂与摇摆臂支架通过摇摆从动齿轮支架转动连接。
[0009]
优选的,所述摇摆从动齿轮的外表面齿轮连接有摇摆主动齿轮,摇摆主动齿轮的侧面设置有摇摆电机,摇摆电机的外表面套接有摇摆电机支架,摇摆电机支架与顶板固定连接,所述摇摆电机的输出轴与摇摆主动齿轮固定连接。
[0010]
优选的,所述弓形架的上表面通过稳定杆支架活动连接有稳定杆,稳定杆远离稳定杆支架一端的侧面齿轮连接有锁定齿轮,锁定齿轮的上方通过连接轴固定连接有固定齿轮,固定齿轮与弓形架通过固定齿轮支架转动连接。
[0011]
优选的,所述固定齿轮的外表面齿轮连接有锁定中间主动齿轮,锁定中间主动齿轮的上方通过连接轴固定连接有锁定中间从动齿轮,所述锁定中间从动齿轮和锁定中间主
动齿轮与弓形架通过锁定中间齿轮支架转动连接。
[0012]
优选的,所述锁定中间从动齿轮的外表面齿轮连接有锁定主动齿轮,锁定主动齿轮的下方设置有锁定电机,锁定电机的外表面与弓形架的侧面通过锁定电机支架固定连接,并且u松鼠锁定电机的输出轴于锁定主动齿轮固定连接。
[0013]
优选的,所述放置盒的侧方通过固定轴固定连接有调节摩擦轮,调节摩擦轮的外侧设置有螺钉,螺钉与放置盒支架通过螺钉支架螺纹连接。
[0014]
与现有技术相比,本发明提供了一种人体行为仿生摆动系统,具备以下有益效果:本发明通过设置安全模块,可以方便使用者将婴儿放在放置盒内部,并且当稳定杆与弓形架闭合时可以加强弓形架的强度,从而防止意外的发生,通过设置调节模块,可以调节调节摩擦轮与螺钉之间的摩擦力,从而控制放置盒在摇晃过程中的摆动幅度,进而可以模拟出人体的运动幅度。
附图说明
[0015]
图1为本发明结构示意图。
[0016]
图2为本发明摇摆模块结构示意图。
[0017]
图3为本发明结构示意图之一。
[0018]
图4为本发明安全模块结构示意图。
[0019]
图中:1-摇摆模块;101-底板;102-顶板支撑杆;103-顶板;104-摇摆电机支架;105-摇摆弧形架;106-摇摆主动齿轮;107-摇摆电机;108-摇摆从动齿轮;109-摇摆臂;110-推动臂;111-摇摆从动齿轮支架;112-摇摆臂支架;2-安全模块;201-弓形架;202-摆动轴;203-弓形架支架;204-稳定杆支架;205-稳定杆;206-锁定齿轮;207-锁定电机支架;208-固定齿轮;209-固定齿轮支架;210-锁定中间从动齿轮;211-锁定中间齿轮支架;212-锁定主动齿轮;213-锁定中间主动齿轮;214-锁定电机;3-调节模块;301-放置盒;302-放置盒支架;303-调节摩擦轮;304-固定轴;305-螺钉支架;306-螺钉。
具体实施方式
[0020]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0021]
请参阅图1、图2、图3、图4所示,本发明提供一种技术方案:一种人体行为仿生摆动系统,包括摇摆模块1、安全模块2和调节模块3,如图1和图2,其中摇摆模块1包括底板101、顶板支撑杆102、顶板103、摇摆电机支架104、摇摆弧形架105、摇摆主动齿轮106、摇摆电机107、摇摆从动齿轮108、摇摆臂109、推动臂110、摇摆从动齿轮支架111和摇摆臂支架112,底板101上方通过顶板支撑杆102固定连接有顶板103,顶板103的下表面固定连接有两个摇摆弧形架105,摆动轴202的一端活动连接有推动臂110,推动臂110远离摆动轴202的一端活动连接有摇摆臂109,摇摆臂109远离推动臂110一端与摇摆弧形架105通过摇摆臂支架112活动连接,摇摆臂109远离推动臂110一端的侧方通过连接轴固定连接有摇摆从动齿轮108,摇摆从动齿轮108和摇摆臂109与摇摆臂支架112通过摇摆从动齿轮支架111转动连接,摇摆从
动齿轮108的外表面齿轮连接有摇摆主动齿轮106,摇摆主动齿轮106的侧面设置有摇摆电机107,摇摆电机107的外表面套接有摇摆电机支架104,摇摆电机支架104与顶板103固定连接,摇摆电机107的输出轴与摇摆主动齿轮106固定连接。
[0022]
如图4为本发明安全模块结构图,其中安全模块2包括弓形架201、摆动轴202、弓形架支架203、稳定杆支架204、稳定杆205、锁定齿轮206、锁定电机支架207、固定齿轮208、固定齿轮支架209、锁定中间从动齿轮210、锁定中间齿轮支架211、锁定主动齿轮212、锁定中间主动齿轮213和锁定电机214,两个摇摆弧形架105的相对面之间通过摆动轴202滑动连接有两个弓形架支架203,两个弓形架支架203的底端固定连接有弓形架201,弓形架201的上表面通过稳定杆支架204活动连接有稳定杆205,稳定杆205远离稳定杆支架204一端的侧面齿轮连接有锁定齿轮206,锁定齿轮206的上方通过连接轴固定连接有固定齿轮208,固定齿轮208与弓形架201通过固定齿轮支架209转动连接,固定齿轮208的外表面齿轮连接有锁定中间主动齿轮213,锁定中间主动齿轮213的上方通过连接轴固定连接有锁定中间从动齿轮210,锁定中间从动齿轮210和锁定中间主动齿轮213与弓形架201通过锁定中间齿轮支架211转动连接,锁定中间从动齿轮210的外表面齿轮连接有锁定主动齿轮212,锁定主动齿轮212的下方设置有锁定电机214,锁定电机214的外表面与弓形架201的侧面通过锁定电机支架207固定连接,并且u松鼠锁定电机214的输出轴于锁定主动齿轮212固定连接。
[0023]
如图3,其中调节模块3包括放置盒301、放置盒支架302、调节摩擦轮303、固定轴304、螺钉支架305和螺钉306,弓形架201的下方通过放置盒支架302活动连接有放置盒301,放置盒301的侧方通过固定轴304固定连接有调节摩擦轮303,调节摩擦轮303的外侧设置有螺钉306,螺钉306与放置盒支架302通过螺钉支架305螺纹连接。
[0024]
在使用时,使用者首先启动锁定电机214,锁定电机214的输出轴就会带动锁定主动齿轮212转动,锁定主动齿轮212转动就会带动锁定中间从动齿轮210转动,锁定中间从动齿轮210转动就会带动锁定中间主动齿轮213转动,锁定中间主动齿轮213转动就会带动固定齿轮208转动,固定齿轮208转动就会带动锁定齿轮206转动,锁定齿轮206转动就会带动稳定杆205与锁定齿轮206分离,这时使用者移开稳定杆205,然后将婴儿放在放置盒301内部,首先通过玄幻螺钉306调节调节摩擦轮303与螺钉306之间的摩擦力,从而控制放置盒301在摇晃过程中的摆动幅度,这时将稳定杆205与锁定齿轮206啮合,然后启动摇摆电机107,摇摆电机107的输出轴就会带动摇摆主动齿轮106转动,摇摆主动齿轮106转动就会带动摇摆从动齿轮108转动,摇摆从动齿轮108转动就会带动摇摆臂109摆动,摇摆臂109摆动就会带动推动臂110摆动,推动臂110摆动就会通过摆动轴202带动弓形架支架203沿着摇摆弧形架105滑动,这时放置盒301就会实现摇摆的功能。
[0025]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1