一种机器人的沿边清洁方法及装置与流程
1.本申请属于清洁机器人技术领域,尤其涉及一种机器人的沿边清洁方法及装置。
背景技术:
2.随着科技的发展,目前清洁机器人已经成为常见的家用电器之一。在日常使用时,清洁机器人常用于室内清洁地面,而室内常常存在各种外直角障碍物。
3.清洁机器人沿着障碍物的一边清洁行进到外直角障碍物边缘时,采用一边行进一边旋转的方式对障碍物进行清洁,但这种清洁方式会使清洁机器人在拐角处存在漏扫的区域。这样,会导致清洁机器人清洁效率差,用户体验不佳的问题。
技术实现要素:
4.本申请实施例提供了一种机器人的沿边清洁方法及装置,可以清洁机器人可以清洁在拐角处的漏扫区域,能够提高用户体验。
5.第一方面,本申请实施例提供了一种机器人的沿边清洁方法,应用于清洁机器人上,包括:在第一方面的一种可能的实现方式中,在所述清洁机器人沿障碍物的第一侧边进行沿边清洁的情况下,所述清洁机器人对所述障碍物的第一侧边和第二侧边的交汇处进行检测;在所述清洁机器人检测到所述交汇处的情况下,所述清洁机器人确定所述清洁机器人执行旋转动作的第一位置;在所述清洁机器人移动到所述第一位置的情况下,在所述第一位置原地旋转第一角度,以使得旋转后的所述清洁机器人与所述第二侧边的夹角小于第二角度,与所述第二侧边的距离小于第一距离。
6.可选地,所述障碍物可以是外直角障碍物或倒角外直角障碍物。
7.需要说明的是,倒角外直角障碍物是指障碍物第一侧边和第二侧边垂直,但第一侧边与第二侧边不直接交汇,第一侧边和第二侧边可以通过直线连接,也可以通过曲线连接。
8.在上述技术方案中,所述清洁机器人在检测到障碍物的交汇处的情况下,先确定一个可以执行旋转动作的位置,所述清洁机器人再行走到所述位置,在所述位置进行原地旋转。这样可以清洁拐角处的区域。
9.可选的,第一位置可以是一个点或者是一个区域。
10.可选的,所述清洁机器人可以是扫地机器人、拖地机器人或扫拖一体机器人。
11.可选的,所述清洁机器人可以利用障碍物传感器包括但不限于视觉传感器、激光雷达传感器、红外传感器、超声波传感器、微波传感器以及毫米波传感器中的至少一项来检测所述障碍物的交汇处。
12.在一些可能的实现方式中,所述清洁机器人确定所述清洁机器人执行旋转动作的第一位置,包括:
13.所述清洁机器人根据所述清洁机器人中驱动轮的横向中心轴线的位置、所述清洁机器人到所述第二侧边的第二距离以及所述清洁机器人的尺寸参数确定所述第一位置。
14.在上述技术方案中,所述清洁机器人在实际行进清洁的情况下,所述清洁机器人根据实际清洁时的所述清洁机器人的位置、所述驱动轮的位置以及所述清洁机器人的尺寸确定第一位置,所述清洁机器人在所述第一位置执行原地旋转动作使得所述清洁机器人能紧贴所述障碍物的第二侧边进行清洁,避免在清洁过程中出现漏扫区域,提高清洁效率。
15.本申请实施例中的紧贴表示所述清洁机器人与所述第二侧边的夹角为[n
°
,m
°
],例如,n
°
=0
°
,m
°
=5
°
。
[0016]
在一些可能的实现方式中,所述清洁机器人与所述第二侧边的距离为[j,k],j=0厘米,k=2厘米。
[0017]
在一些可能的实现方式中,所述清洁机器人根据所述清洁机器人中驱动轮的横向中心轴线位置、所述清洁机器人到所述第二侧边的第二距离以及所述清洁机器人的尺寸参数确定所述第一位置,包括:
[0018]
所述清洁机器人根据所述清洁机器人中所述驱动轮的横向中心轴线与所述清洁机器人的横向中心轴线的垂直距离和所述清洁机器人的尺寸参数确定所述清洁机器人执行旋转动作时,所述清洁机器人在第一方向的边缘距所述第二侧边垂直的第三距离;
[0019]
所述清洁机器人根据所述第二距离和所述第三距离确定所述第一位置;
[0020]
其中,所述第二距离为所述清洁机器人检测到所述交汇处时所述清洁机器人在第一方向的边缘距所述第二侧边垂直的距离;所述驱动轮的横向中心轴线、所述清洁机器人的横向中心轴线垂直于所述第一方向;所述第一方向与所述清洁机器人前进的第二方向相反。
[0021]
在一些可能的实现方式中,所述清洁机器人根据所述清洁机器人中所述驱动轮的横向中心轴线与所述清洁机器人的横向中心轴线的相对位置和所述清洁机器人的尺寸参数确定所述清洁机器人执行旋转动作时,所述清洁机器人在第一方向的边缘距所述第二侧边垂直的第三距离,包括:
[0022]
当所述驱动轮所在横向中心轴线与所述清洁机器人的横向中心轴线重合时,确定所述第三距离为
[0023]
其中,a为所述清洁机器人的横向最长轴的长度,b为所述清洁机器人的纵向最长轴的长度,a和b的单位相同。
[0024]
在一些可能的实现方式中,所述清洁机器人根据所述清洁机器人中所述驱动轮的横向中心轴线与所述清洁机器人的横向中心轴线的相对位置和所述清洁机器人的尺寸参数确定所述清洁机器人执行旋转动作时,所述清洁机器人在第一方向的边缘距所述第二侧边垂直的第三距离,包括:
[0025]
当所述驱动轮所在横向中心轴线与所述清洁机器人的横向中心轴线不重合,且所述驱动轮所在横向中心轴线距所述清洁机器人所述第二方向的边缘的距离大于所述驱动轮所在横向中心轴线距所述清洁机器人所述第一方向的边缘距离时,确定所述第三距离为
[0026]
其中,x为所述驱动轮的横向中心轴线距所述清洁机器人横向中心轴的垂直距离,a为所述清洁机器人的横向最长轴的长度,b为所述清洁机器人的纵向最长轴的长度,x、a和
b的单位相同。
[0027]
在一些可能的实现方式中,所述清洁机器人根据所述清洁机器人中所述驱动轮的横向中心轴线与所述清洁机器人的横向中心轴线的相对位置和所述清洁机器人的尺寸参数确定所述清洁机器人执行旋转动作时,所述清洁机器人在第一方向的边缘距所述第二侧边垂直的第三距离,包括:
[0028]
当所述驱动轮所在横向中心轴线与所述清洁机器人的横向中心轴线不重合,且所述驱动轮所在横向中心轴线距所述清洁机器人所述第一方向的边缘的距离大于所述驱动轮所在横向中心轴线距所述清洁机器人所述第二方向的边缘距离时,确定所述第三距离为
[0029]
其中,x为所述驱动轮的横向中心轴线距所述清洁机器人横向中心轴的垂直距离,a为所述清洁机器人的横向最长轴的长度,b为所述清洁机器人的纵向最长轴的长度,x、a和b的单位相同。
[0030]
在一些可能的实现方式中,所述第二距离为当所述清洁机器人检测到所述交汇处时,所述清洁机器人到所述第二侧边距离为所述第二距离;
[0031]
所述清洁机器人根据所述第二距离和所述第三距离确定所述第一位置,包括:
[0032]
所述清洁机器人将所述第二距离和所述第三距离求和或求差确定所述第一位置。
[0033]
在上述技术方案中,根据所述驱动轮所在位置不同而提供不同的第三距离,使得本申请提供的方法能应用于各种尺寸参数不同的清洁机器人上。
[0034]
在一些可能的实现方式中,所述第一角度大于或等于80
°
,且小于或等于100
°
。
[0035]
在一些可能的实现方式中,所述第一距离大于或等于0厘米,且小于或等于2厘米;
[0036]
第二角度大于或等于0
°
,且小于或等于10
°
。
[0037]
第二方面,本申请实施例提供了一种装置,包括存储器和处理器,其中,所述处理器与存储器耦合,所述处理器用于执行所述存储器中存储的计算机程序或指令,使得第一方面中的方法被执行。
[0038]
第三方面,本申请实施例本申请提供一种计算机程序产品,所述计算机程序产品包括计算机程序(也可称为指令或代码),所述计算机程序被计算机执行时使得所述计算机实现第一方面中的方法。
[0039]
第四方面,本申请实施例提供了一种计算机可读存储介质,其上存储有用于实现第一方面中的方法的计算机程序(也可称为指令或代码)。
[0040]
可以理解的是,上述第二方面和第三方面以及第四方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
[0041]
本申请实施例与现有技术相比存在的有益效果是:本申请实施例中清洁机器人在沿障碍物的第一侧边清洁,在清洁机器人检测到障碍物的交汇处的情况下,根据清洁机器人中驱动轮的横向中心轴线的位置、清洁机器人到第二侧边的第二距离以及清洁机器人的尺寸参数确定清洁机器人执行旋转动作的第一位置,随后清洁机器人行进到第一位置内执行原地旋转动作,使得清洁机器人能在旋转后贴着障碍物的第二侧边,并沿着障碍物的第二侧边继续清洁,清洁机器人可以清洁在拐角处的区域,提高了清洁机器人的清洁效率和清洁覆盖率,有利于提高用户体验。
附图说明
[0042]
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0043]
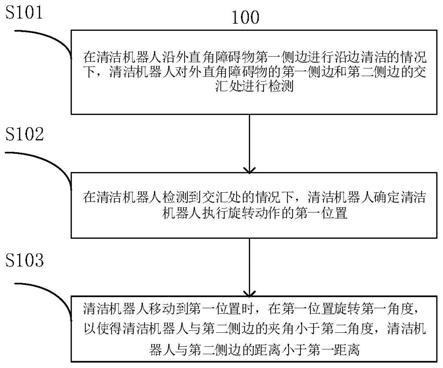
图1是本申请实施例提供的一种机器人的沿边清洁方法的流程示意图;
[0044]
图2是本申请实施例提供的障碍物的示意图;
[0045]
图3是本申请实施例提供的驱动轮的相对位置和清洁机器人的尺寸参数的示意图;
[0046]
图4是本申请实施例提供的一例圆形清洁机器人的沿边清洁的方法的示意图;
[0047]
图5是本申请实施例提供的一例正方形清洁机器人的沿边清洁的方法的示意图;
[0048]
图6
‑
图12是本申请实施例提供的长方形清洁机器人的沿边清洁的方法的示意图;
[0049]
图13是本申请实施例提供的一例装置的示意性框图。
具体实施方式
[0050]
以下描述中,为了说明而不是为了限定,提出了诸如特定技术之类的具体细节,以便透彻理解本申请实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本申请。在其它情况中,省略对众所周知的装置、电路以及方法的详细说明,以免不必要的细节妨碍本申请的描述。
[0051]
应当理解,当在本申请说明书和所附权利要求书中使用时,术语“包括”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
[0052]
还应当理解,在本申请说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
[0053]
如在本申请说明书和所附权利要求书中所使用的那样,术语“如果”可以依据上下文被解释为“当...时”或“一旦”或“响应于确定”或“响应于检测到”。
[0054]
另外,在本申请说明书和所附权利要求书的描述中,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
[0055]
在本申请说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本申请的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”及它的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
[0056]
在一种可能的实现方式中,清洁机器人在对障碍物进行沿边清洁时,会在拐角处在行进的同时执行旋转动作,这种清洁方式会使得清洁机器人在拐角处产生一片漏扫区域,这样使得清洁机器人清洁效率差。为了清洁这一片漏扫区域,清洁机器人需要在旋转之后沿与前进方向相反的方向移动一段距离,这样会使得清洁机器人清洁比较复杂,影响用户的体验感。本申请实施例提供一种机器人的沿边清洁方法及装置,清洁机器人在对障碍物的一边进行沿边清洁时,先确定一个旋转的区域,清洁机器人移动到旋转的区域之后再
执行原地旋转动作,旋转之后使得清洁机器人可以清洁障碍物的另一边,这样减少漏扫区域,提高清洁机器人的清洁效率,也能降低清洁的复杂度。
[0057]
本申请实施例中,清洁机器人可以沿外直角障碍物或倒角外直角障碍物行进清洁,也可以沿外钝角障碍物和/或内钝角障碍物行进清洁,还可以沿圆形障碍物行进清洁。
[0058]
其中,倒角外直角障碍物包括倒直角外直角障碍物以及倒圆角外直角障碍物。
[0059]
图2为清洁机器人的外直角障碍物、倒直角外直角障碍物以及倒圆角外直角障碍物的示意图。
[0060]
如图2所示,外直角障碍物的直角由第一侧边、第二侧边以及交汇处组成;其中,第一侧边垂直于第二侧边,且交汇处为第一侧边和第二侧边的垂足。
[0061]
如图2所述,倒直角外直角障碍物和倒圆角外直角障碍物的交汇处是由倒直角外直角障碍物的第一侧边和第二侧边的延伸线的交汇处;其中,第一侧边垂直于第二侧边。
[0062]
不同的障碍物,机器人行走到旋转的区域时,原地旋转一定的角度不同,例如,清洁机器人沿外直角障碍物行进清洁,旋转的角度可以是[80
°
,100
°
]。又例如,若清洁机器人沿角度为x
°
的外钝角障碍物行进清洁,旋转的角度可以是[x
°‑
190
°
,x
°‑
170
°
]。若清洁机器人沿角度为y
°
的内钝角障碍物行进清洁时,旋转的角度可以是[170
°‑
y
°
,190
°‑
y
°
]。本申请实施例仅以沿外直角障碍物为例描述,但本申请实施例对此不予限制。
[0063]
图1为本申请实施例提供的一种机器人的沿边清洁方法100的流程示意图,参考图1,本申请实施例中的清洁机器人沿边清洁的方法可以包括如下步骤:
[0064]
s101,在清洁机器人沿外直角障碍物第一侧边进行沿边清洁的情况下,清洁机器人对外直角障碍物的第一侧边和第二侧边的交汇处进行检测。
[0065]
可选的,交汇处可以是第一侧边和第二侧边的交汇点,也可以是垂直于地面的第一侧边和第二侧边的交汇线。
[0066]
在一些可能的实现方式中,障碍物可以是倒角外直角障碍物,交汇处可以是倒角外直角障碍物的第一侧边和第二侧边延伸之后的交汇点,也可以是倒角外直角障碍物的第一侧边和第二侧边延伸之后垂直于地面的交汇线。
[0067]
如图2所示,示出了清洁机器人的外直角障碍物的示意图。
[0068]
如图2所示,外直角障碍物的直角由第一侧边、第二侧边以及交汇处组成。
[0069]
其中,第一侧边垂直于第二侧边,且交汇处为第一侧边和第二侧边的垂足。
[0070]
其中,清洁机器人可以是扫地机器人、拖地机器人或扫拖一体机器人。本申请对此不作限定。
[0071]
在一些可能的实现方式中,清洁机器人可以利用障碍物传感器来检测清洁机器人到外直角障碍物的交汇处的距离。
[0072]
可选的,障碍物传感器包括视觉传感器、激光雷达传感器、红外传感器、超声波传感器、微波传感器以及毫米波传感器。
[0073]
可选地,障碍物传感器可以检测在第二方向上的障碍物,也可以检测垂直于第二方向的方向上的障碍物。
[0074]
需要说明的是,第二方向平行于清洁机器人的前进方向且方向相同,第一方向平行于清洁机器人的前进且方向相反。
[0075]
需要说明的是,障碍物传感器可以检测障碍物传感器到障碍物交汇处的垂直距
离,也可以通过返回信号检测是否存在障碍物,如果通过返回的信号检测到存在障碍物可以检测清洁机器人与障碍物的相对位置。这对本领域技术人员来说是显而易见的,本申请对此不作限定。
[0076]
在一些可能的实现方式中,障碍物传感器可以检测到障碍物的形状为外直角。
[0077]
清洁机器人可以通过一下至少一种方式获取,障碍物的形状为外直角:
[0078]
方式一,在方法100之前,清洁机器人中预设障碍物为外直角障碍物。
[0079]
方式二,清洁机器人沿障碍物第一侧边行进清洁时,方法100还包括:
[0080]
清洁机器人沿外直角障碍物第一侧边行进清洁时,清洁机器人中的障碍物传感器可以检测到障碍物的形状为外直角障碍物。
[0081]
方式三,清洁机器人沿障碍物第一侧边行进清洁时,可以通过其他方式获知障碍物为外直角障碍物,例如,手机将障碍物为外直角障碍物的信息告知清洁机器人。
[0082]
需要说明的是,清洁机器人沿着外直角障碍物第一侧边行进清洁时,清洁机器人可以紧贴着外直角障碍物第一侧边,也可以距外直角障碍物第一侧边存在一段距离。
[0083]
s102:在清洁机器人检测到交汇处的情况下,清洁机器人确定清洁机器人执行旋转动作的第一位置。
[0084]
可选地,当清洁机器人检测到交汇处时,清洁机器人可以还没到达交汇处,也可以是刚好到达交汇处,还可以已经越过交汇处。
[0085]
可选地,清洁机器人可以将第二距离和第三距离求和确定所述第一位置,也可以将第二距离和第三距离求差确定所述第一位置。
[0086]
可选地,第二距离可以是清洁机器人检测到交汇处时,清洁机器人第一方向的边缘到第二侧边的距离,第三距离可以是清洁机器人执行原地旋转动作时,清洁机器人第一方向的边缘到第二侧边的距离;
[0087]
可选地,第二距离也可以是清洁机器人检测到交汇处时,清洁机器人第一方向的边缘到第二侧边的距离,第三距离也可以是清洁机器人执行原地旋转动作时,清洁机器人第一方向的边缘到第二侧边的距离;
[0088]
可选地,第二距离还可以是清洁机器人检测到交汇处时,垂直于第一方向的清洁机器人横向中心轴到第二侧边的距离,第三距离还可以是清洁机器人执行原地旋转动作时,垂直于第一方向的清洁机器人横向中心轴到第二侧边的距离。本申请对此不作限定。
[0089]
可选地,s102,包括:清洁机器人根据所述清洁机器人中驱动轮的横向中心轴线的位置、清洁机器人到第二侧边垂直的第二距离以及清洁机器人的尺寸参数确定所述第一位置。
[0090]
可选地,清洁机器人的驱动轮可以是一个驱动轮,也可以是两个驱动轮,还可以是三个驱动轮。
[0091]
可选地,清洁机器人的尺寸参数包括:清洁机器人的形状为圆形,清洁机器人的尺寸参数包括:直径和/或半径;若清洁机器人的形状为矩形,清洁机器人的尺寸参数包括:长和宽,或者包括长与宽的差;清洁机器人的形状为三角形,清洁机器人的尺寸参数包括:三角形的高和底边,或者包括三角形在第一方向和第二方向上的最长轴。本申请对此不作限定。
[0092]
应理解,清洁机器人根据清洁机器人中驱动轮的横向中心轴线的位置、清洁机器
人到第二侧边的第二距离以及清洁机器人的尺寸参数确定的是一个点,而第一位置可以是确定的点,也可以是以这个点为圆心半径为r的圆形区域,也可以是以这个点为重心的一个边长为d的三角形区域,还可以是以这个点为重心的一个边长为h的正方形区域。第一位置的大小和形状可以根据实际情况和用户的需求进行设置。本申请对此不作限定。
[0093]
s103:清洁机器人行进到第一位置时,在第一位置旋转第一角度,以使得清洁机器人与第二侧边的夹角小于第二角度,清洁机器人与第二侧边的距离小于第一距离。
[0094]
其中,第一角度可以是清洁机器人在第一位置执行旋转动作的角度,用户可以根据实际情况对第一角度进行设置。本申请对此不作限定。
[0095]
其中,第二角度可以是清洁机器人在第一位置原地旋转之后,清洁机器人与外直角障碍物第二侧边的夹角,用户可以根据实际情况对第二角度进行设置。本申请对此不作限定。
[0096]
其中,第一距离可以是清洁机器人在第一位置原地旋转之后,与清洁机器人旋转方向相同且与清洁机器人前进方向平行的侧边到外直角障碍物第二侧边的距离,用户可以根据实际情况对第二角度进行设置。本申请对此不作限定。
[0097]
可选地,本申请中清洁机器人在第一位置旋转之后,清洁机器人可以通过安装在清洁机器人上的障碍物传感器和/或陀螺仪进行检测清洁机器人与第二侧边的夹角和/或清洁机器人与第二侧边的距离;清洁机器人可以直接继续行进清洁,不检测清洁机器人与第二侧边的夹角和/或清洁机器人与第二侧边的距离。本申请对此不作限定。
[0098]
应理解,障碍物传感器的安装位置可以是清洁机器人上的任何位置,这对本领域的技术人员来说是显而易见的。本申请对传感器的安装位置并不作限定。
[0099]
通过s101至s103的执行,清洁机器人可以避免在清洁外直角障碍物时存在漏扫区域的情况,提升了清洁效率和清洁效果。
[0100]
图3提供了本申请实施例的驱动轮的相对位置和清洁机器人的尺寸参数的示意图。
[0101]
如图3所示,清洁机器人可以是如图3中各种形状;驱动轮所在横向中心轴线可以在清洁机器人横向中心轴上,也可以在清洁机器人横向中心轴与清洁机器人第一方向的边缘之间,还可以在清洁机器人横向中心轴与清洁机器人第二方向的边缘之间。
[0102]
其中,a为清洁机器人的横向最长轴的长度,b为清洁机器人的纵向最长轴的长度,x为驱动轮所在横向中心轴线距清洁机器人横向中心轴的垂直距离;横向最长轴、驱动轮所在横向中心轴线和清洁机器人横向中心轴垂直于第一方向和/或第二方向,纵向最长轴平行于第一方向和/或第二方向。
[0103]
在一些可能的实现方式中,障碍物传感器可以安装在清洁机器人的前或后边缘上,也可以安装在清洁机器人左侧或右侧边缘上,还可以安装在清洁机器人的其他位置。
[0104]
在一些可能的实现方式中,障碍物传感器安装在清洁机器人的前边缘上,障碍物传感器可以检测障碍物传感器到障碍物交汇处的垂直距离l和障碍物传感器所在横向中心轴到清洁机器人后边缘的距离s。在这种情况下,距离l与距离s的和为第二距离。
[0105]
在一些可能的实现方式中,障碍物传感器安装在清洁机器人的后边缘上,障碍物传感器可以检测障碍物传感器到障碍物交汇处的垂直距离l。在这种情况下,距离l为第二距离。
[0106]
在一些可能的实现方式中,障碍物传感器安装在清洁机器人的其他位置上,障碍物传感器可以检测其它的距离和尺寸参数来确定第二距离。
[0107]
图4至图11提供的沿边清洁的方法示意图皆以具有两个驱动轮的清洁机器人沿外直角障碍物第一侧边行进清洁,通过安装在清洁机器人上障碍物传感器检测外直角障碍物交汇处;以第二距离是清洁机器人检测到交汇处时,清洁机器人第一方向的边缘到第二侧边的距离,第三距离是清洁机器人执行原地旋转动作时,清洁机器人第一方向的边缘到第二侧边的距离,确定清洁机器人执行原地旋转动作的第一位置;到达清洁机器人执行原地旋转动作的第一位置后向顺时针方向旋转90
°
之后紧贴外直角障碍物第二侧边的情况为例。
[0108]
在本发明提供的实施例中,检测外直角障碍物交汇处的障碍物传感器安装在清洁机器人与清洁机器人前进方向相同的第二方向上的边缘上。
[0109]
可选地,清洁机器人检测到交汇处时,清洁机器人第一方向的边缘与清洁机器人执行原地旋转动作时,根据清洁机器人第一方向的边缘在或不在第二侧边的同一侧,清洁机器人将第二距离和第三距离求差或求和确定第一位置。
[0110]
具体地,若清洁机器人检测到交汇处时,清洁机器人第一方向的边缘与清洁机器人执行原地旋转动作时,根据清洁机器人第一方向的边缘在第二侧边的同一侧,清洁机器人将第二距离和第三距离求差确定第一位置;
[0111]
若清洁机器人检测到交汇处时,清洁机器人第一方向的边缘与清洁机器人执行原地旋转动作时,根据清洁机器人第一方向的边缘不在第二侧边的同一侧,清洁机器人将第二距离和第三距离求和确定第一位置。
[0112]
以下结合图4至图7对驱动轮所在横向中心轴线与清洁机器人的横向中心轴重合的情况进行说明;
[0113]
图4以驱动轮401的横向中心轴与清洁机器人横向中心轴重合的圆形清洁机器人402为例,提供了一例圆形清洁机器人的沿边方法。其中,如图4中的(a)图所示,圆形清洁机器人402沿外直角障碍物第一侧边前进清洁,此时安装于圆形清洁机器人402上的障碍物传感器403对外直角障碍物进行检测,当圆形清洁机器人402检测到检测到外直角障碍物的交汇处时,确定圆形清洁机器人402要执行旋转动作的第一位置。
[0114]
如图4所示,障碍物传感器403安装在圆形清洁机器人402的第二方向边缘上。
[0115]
在一些可能的实现方式中,当障碍物传感器403检测到外直角障碍物交汇处时,障碍物传感器403可以检测障碍物传感器403到外直角障碍物交汇处的距离l1,圆形清洁机器人402根据距离l1、障碍物传感器403所在横向中心轴到圆形清洁机器人402上与圆形清洁机器人402前进方向相反的第一方向的边缘的距离s1以及第三距离来确定圆形清洁机器人402到达第一位置还需行走的距离。
[0116]
其中,第二距离是距离l1与距离s1求和。
[0117]
由图4可知,为0,那么圆形清洁机器人402到达第一位置还需行走s1+l1才能到达第一位置。
[0118]
如图4中的(b)图所示,圆形清洁机器人402行走s1+l1到达第一位置,在此圆形清
洁机器人402以驱动轮的中心为中心沿顺时针方向旋转90
°
。
[0119]
如图4中的(c)图所示,圆形清洁机器人402旋转之后,圆形清洁机器人402与外直角障碍物第二侧边的夹角为0
°
,圆形清洁机器人402与外直角障碍物第二侧边的距离为0厘米。
[0120]
如图4中的(d)图所示,圆形清洁机器人402紧贴外直角障碍物第二侧边继续前进清洁。
[0121]
应理解,本申请提供的实施例中清洁机器人在第一位置旋转的方向和角度可以根据实际情况进行设置。本申请对此不作限定。
[0122]
图5以驱动轮501的横向中心轴与清洁机器人横向中心轴重合的正方形清洁机器人502为例,提供了一例正方形清洁机器人的沿边方法。其中,如图5中的(a)图所示,正方形清洁机器人502沿外直角障碍物第一侧边前进清洁,此时安装于正方形清洁机器人502上的障碍物传感器503对外直角障碍物进行检测,当正方形清洁机器人502检测到检测到外直角障碍物的交汇处时,确定正方形清洁机器人502要执行旋转动作的第一位置。
[0123]
如图5所示,障碍物传感器503安装在正方形清洁机器人502的第二方向边缘与右侧边缘的夹角处。
[0124]
在一些可能的实现方式中,当障碍物传感器503检测到外直角障碍物交汇处时,障碍物传感器503可以检测障碍物传感器503到外直角障碍物交汇处的距离l2,正方形清洁机器人502根据距离l2、以及障碍物传感器503所在横向中心轴到正方形清洁机器人502上与正方形清洁机器人502前进方向相反的第一方向的边缘的距离s2以及第三距离来确定正方形清洁机器人502到达第一位置还需行走的距离。
[0125]
其中,第二距离是距离l2与距离s2求和。
[0126]
由图5可知,为0,那么正方形清洁机器人502到达第一位置还需行走s2+l2才能到达第一位置。
[0127]
如图5中的(b)图所示,正方形清洁机器人502行走s2+l2到达第一位置,在此正方形清洁机器人502以驱动轮的中心为中心沿顺时针方向旋转90
°
。
[0128]
如图5中的(c)图所示,正方形清洁机器人502旋转之后,正方形清洁机器人502与外直角障碍物第二侧边的夹角为0
°
,正方形清洁机器人502与外直角障碍物第二侧边的距离为0厘米。
[0129]
如图5中的(d)图所示,正方形清洁机器人502紧贴外直角障碍物第二侧边继续前进清洁。
[0130]
图6以驱动轮601的横向中心轴与清洁机器人横向中心轴重合,且清洁机器人横向最长轴小于清洁机器人纵向最长轴的长方形清洁机器人602为例,提供了一例长方形清洁机器人的沿边方法。其中,如图6中的(a)图所示,长方形清洁机器人602沿外直角障碍物第一侧边前进清洁,此时安装于长方形清洁机器人602上的障碍物传感器603对外直角障碍物进行检测,当长方形清洁机器人602检测到检测到外直角障碍物的交汇处时,确定长方形清洁机器人602要执行旋转动作的第一位置。
[0131]
如图6所示,障碍物传感器603安装在长方形清洁机器人602的第二方向边缘与右
侧边缘的夹角处。
[0132]
在一些可能的实现方式中,当障碍物传感器603检测到外直角障碍物交汇处时,障碍物传感器603可以检测障碍物传感器603到外直角障碍物交汇处的距离l3,长方形清洁机器人602根据距离l3、以及障碍物传感器603所在横向中心轴到长方形清洁机器人602上与长方形清洁机器人602前进方向相反的第一方向的边缘的距离s3,来确定长方形清洁机器人602到达第一位置还需行走的距离以及第三距离
[0133]
其中,第二距离是距离l3与距离s3求和。
[0134]
由图6可知,清洁机器人检测到交汇处时,清洁机器人第一方向的边缘与清洁机器人执行原地旋转动作时,清洁机器人第一方向的边缘在第二侧边的同一侧,清洁机器人应将第二距离和第三距离求差确定第一位置;则长方形清洁机器人602到达第一位置还需行走才能到达第一位置。
[0135]
如图6中的(b)图所示,长方形清洁机器人602行走到达第一位置,在此长方形清洁机器人602以驱动轮的中心为中心沿顺时针方向旋转90
°
。
[0136]
如图6中的(c)图所示,长方形清洁机器人602旋转之后,长方形清洁机器人602与外直角障碍物第二侧边的夹角为0
°
,长方形清洁机器人602与外直角障碍物第二侧边的距离为0厘米。
[0137]
如图6中的(d)图所示,长方形清洁机器人602紧贴外直角障碍物第二侧边继续前进清洁。
[0138]
图7以驱动轮701的横向中心轴与清洁机器人横向中心轴重合,且清洁机器人横向最长轴大于清洁机器人纵向最长轴的长方形清洁机器人702为例,提供了一例长方形清洁机器人的沿边方法。其中,如图7中的(a)图所示,长方形清洁机器人702沿外直角障碍物第一侧边前进清洁,此时安装于长方形清洁机器人702上的障碍物传感器703对外直角障碍物进行检测,当长方形清洁机器人702检测到检测到外直角障碍物的交汇处时,确定长方形清洁机器人702要执行旋转动作的第一位置。
[0139]
如图7所示,障碍物传感器703安装在长方形清洁机器人702的第二方向边缘与右侧边缘的夹角处。
[0140]
在一些可能的实现方式中,当障碍物传感器703检测到外直角障碍物交汇处时,障碍物传感器703可以检测障碍物传感器703到外直角障碍物交汇处的距离l4,长方形清洁机器人702根据距离l4、障碍物传感器703所在横向中心轴到长方形清洁机器人702上与长方形清洁机器人702前进方向相反的第一方向的边缘的距离s4以及第三距离来确定长方形清洁机器人702到达第一位置还需行走的距离。
[0141]
其中,第二距离是距离l4与距离s4求和。
[0142]
由图7可知,清洁机器人检测到交汇处时,清洁机器人第一方向的边缘与清洁机器人执行原地旋转动作时,清洁机器人第一方向的边缘不在第二侧边的同一侧,清洁机器人应将第二距离和第三距离求和确定第一位置;则长方形清洁机器人702到达第一位置还需
行走才能到达第一位置。
[0143]
如图7中的(b)图所示,长方形清洁机器人702行走到达第一位置,在此长方形清洁机器人702以驱动轮的中心为中心沿顺时针方向旋转90
°
。
[0144]
如图7中的(c)图所示,长方形清洁机器人702旋转之后,长方形清洁机器人702与外直角障碍物第二侧边的夹角为0
°
,长方形清洁机器人702与外直角障碍物第二侧边的距离为0厘米。
[0145]
如图7中的(d)图所示,长方形清洁机器人702紧贴外直角障碍物第二侧边继续前进清洁。
[0146]
在一些可能的实现方式中,当驱动轮所在横向中心轴线与清洁机器人的横向中心轴不重合,且驱动轮所在横向中心轴线距清洁机器人第二方向的边缘的距离大于驱动轮所在横向中心轴线距清洁机器人第一方向的边缘距离时,确定第三距离为
[0147]
以下结合图8和图9对驱动轮所在横向中心轴线距清洁机器人第二方向的边缘的距离大于驱动轮所在横向中心轴线距清洁机器人第一方向的边缘距离的情况进行说明;
[0148]
图8以驱动轮801的横向中心轴远离与清洁机器人前进方向相同的第二方向,且清洁机器人横向最长轴小于清洁机器人纵向最长轴的长方形清洁机器人802为例,提供了一例长方形清洁机器人的沿边方法。其中,如图8中的(a)图所示,长方形清洁机器人802沿外直角障碍物第一侧边前进清洁,此时安装于长方形清洁机器人802上的障碍物传感器803对外直角障碍物进行检测,当长方形清洁机器人802检测到检测到外直角障碍物的交汇处时,确定长方形清洁机器人802要执行旋转动作的第一位置。
[0149]
如图8所示,障碍物传感器803安装在长方形清洁机器人802的第二方向边缘与右侧边缘的夹角处。
[0150]
在一些可能的实现方式中,当障碍物传感器803检测到外直角障碍物交汇处时,障碍物传感器803可以检测障碍物传感器803到外直角障碍物交汇处的距离l5,长方形清洁机器人802根据距离l5、以及障碍物传感器803所在横向中心轴到长方形清洁机器人802上与长方形清洁机器人802前进方向相反的第一方向的边缘的距离s5以及第三距离来确定长方形清洁机器人802到达第一位置还需行走的距离。
[0151]
其中,第二距离是距离l5与距离s5求和。
[0152]
由图8可知,清洁机器人检测到交汇处时,清洁机器人第一方向的边缘与清洁机器人执行原地旋转动作时,清洁机器人第一方向的边缘不在第二侧边的同一侧,清洁机器人应将第二距离和第三距离求和确定第一位置;则长方形清洁机器人802到达第一位置还需行走才能到达第一位置。
[0153]
如图8中的(b)图所示,长方形清洁机器人802行走到达第一位置,在此长方形清洁机器人802以驱动轮的中心为中心沿顺时针方向旋转90
°
。
[0154]
如图8中的(c)图所示,长方形清洁机器人802旋转之后,长方形清洁机器人802与
外直角障碍物第二侧边的夹角为0
°
,长方形清洁机器人802与外直角障碍物第二侧边的距离为0厘米。
[0155]
如图8中的(d)图所示,长方形清洁机器人802紧贴外直角障碍物第二侧边继续前进清洁。
[0156]
图9以驱动轮901的横向中心轴远离与清洁机器人前进方向相同的第二方向,且清洁机器人横向最长轴大于清洁机器人纵向最长轴的长方形清洁机器人902为例,提供了一例长方形清洁机器人的沿边方法。其中,如图9中的(a)图所示,长方形清洁机器人902沿外直角障碍物第一侧边前进清洁,此时安装于长方形清洁机器人902上的障碍物传感器903对外直角障碍物进行检测,当长方形清洁机器人902检测到检测到外直角障碍物的交汇处时,确定长方形清洁机器人902要执行旋转动作的第一位置。
[0157]
如图9所示,障碍物传感器903安装在长方形清洁机器人902的第二方向边缘与右侧边缘的夹角处。
[0158]
在一些可能的实现方式中,当障碍物传感器903检测到外直角障碍物交汇处时,障碍物传感器903可以检测障碍物传感器903到外直角障碍物交汇处的距离l6,长方形清洁机器人902根据距离l6、障碍物传感器903所在横向中心轴到长方形清洁机器人902上与长方形清洁机器人902前进方向相反的第一方向的边缘的距离s6以及第三距离来确定长方形清洁机器人902到达第一位置还需行走的距离。
[0159]
其中,第二距离是距离l6与距离s6求和。
[0160]
由图9可知,清洁机器人检测到交汇处时,清洁机器人第一方向的边缘与清洁机器人执行原地旋转动作时,清洁机器人第一方向的边缘不在第二侧边的同一侧,清洁机器人应将第二距离和第三距离求和确定第一位置;则长方形清洁机器人902到达第一位置还需行走才能到达第一位置。
[0161]
如图9中的(b)图所示,长方形清洁机器人902行走到达第一位置,在此长方形清洁机器人902以驱动轮的中心为中心沿顺时针方向旋转90
°
。
[0162]
如图9中的(c)图所示,长方形清洁机器人902旋转之后,长方形清洁机器人902与外直角障碍物第二侧边的夹角为0
°
,长方形清洁机器人902与外直角障碍物第二侧边的距离为0厘米。
[0163]
如图9中的(d)图所示,长方形清洁机器人902紧贴外直角障碍物第二侧边继续前进清洁。
[0164]
在一些可能的实现方式中,当驱动轮所在横向中心轴线与清洁机器人的横向中心轴不重合,且驱动轮所在横向中心轴线距清洁机器人第一方向的边缘的距离大于驱动轮所在横向中心轴线距清洁机器人第二方向的边缘距离时,确定第三距离为
[0165]
以下结合图10至图12对驱动轮所在横向中心轴线距清洁机器人第一方向的边缘的距离大于驱动轮所在横向中心轴线距清洁机器人第二方向的边缘距离的情况进行说明;
[0166]
图10以驱动轮1001的横向中心轴远离与清洁机器人前进方向相反的第一方向,且清洁机器人横向最长轴大于清洁机器人纵向最长轴的长方形清洁机器人1002为例,提供了
一例长方形清洁机器人的沿边方法。其中,如图10中的(a)图所示,长方形清洁机器人1002沿外直角障碍物第一侧边前进清洁,此时安装于长方形清洁机器人1002上的障碍物传感器1003对外直角障碍物进行检测,当长方形清洁机器人1002检测到检测到外直角障碍物的交汇处时,确定长方形清洁机器人1002要执行旋转动作的第一位置。
[0167]
如图10所示,障碍物传感器1003安装在长方形清洁机器人1002的第二方向边缘与右侧边缘的夹角处。
[0168]
在一些可能的实现方式中,当障碍物传感器1003检测到外直角障碍物交汇处时,障碍物传感器1003可以检测障碍物传感器1003到外直角障碍物交汇处的距离l7,长方形清洁机器人1002根据距离l7、障碍物传感器1003所在横向中心轴到长方形清洁机器人1002上与长方形清洁机器人1002前进方向相反的第一方向的边缘的距离s7以及第三距离来确定长方形清洁机器人1002到达第一位置还需行走的距离。
[0169]
其中,第二距离是距离l7与距离s7求和。
[0170]
由图10可知,清洁机器人检测到交汇处时,清洁机器人第一方向的边缘与清洁机器人执行原地旋转动作时,清洁机器人第一方向的边缘在第二侧边的同一侧,清洁机器人应将第二距离和第三距离求差确定第一位置;则长方形清洁机器人1002到达第一位置还需行走才能到达第一位置。
[0171]
如图10中的(b)图所示,长方形清洁机器人1002行走如图10中的(b)图所示,长方形清洁机器人1002行走到达第一位置,在此长方形清洁机器人1002以驱动轮的中心为中心沿顺时针方向旋转90
°
。
[0172]
如图10中的(c)图所示,长方形清洁机器人1002旋转之后,长方形清洁机器人1002与外直角障碍物第二侧边的夹角为0
°
,长方形清洁机器人1002与外直角障碍物第二侧边的距离为0厘米。
[0173]
如图10中的(d)图所示,长方形清洁机器人1002紧贴外直角障碍物第二侧边继续前进清洁。
[0174]
图11以驱动轮1101的横向中心轴远离与清洁机器人前进方向相反的第一方向,且清洁机器人横向最长轴小于清洁机器人纵向最长轴的长方形清洁机器人1102为例,提供了一例长方形清洁机器人的沿边方法。其中,如图11中的(a)图所示,长方形清洁机器人1102沿外直角障碍物第一侧边前进清洁,此时安装于长方形清洁机器人1102上的障碍物传感器1103对外直角障碍物进行检测,当长方形清洁机器人1102检测到检测到外直角障碍物的交汇处时,确定长方形清洁机器人1102要执行旋转动作的第一位置。
[0175]
如图11所示,障碍物传感器1103安装在长方形清洁机器人1102的第二方向边缘与右侧边缘的夹角处。
[0176]
在一些可能的实现方式中,当障碍物传感器1103检测到外直角障碍物交汇处时,障碍物传感器1103可以检测障碍物传感器1103到外直角障碍物交汇处的距离l8,长方形清洁机器人1102根据距离l8、障碍物传感器1103所在横向中心轴到长方形清洁机器人1102上与长方形清洁机器人1102前进方向相反的第一方向的边缘的距离s8以及第三距离来确定长方形清洁机器人1102到达第一位置还需行走的距离。
[0177]
其中,第二距离是距离l8与距离s8求和。
[0178]
由图11可知,清洁机器人检测到交汇处时,清洁机器人第一方向的边缘与清洁机器人执行原地旋转动作时,清洁机器人第一方向的边缘在第二侧边的同一侧,清洁机器人应将第二距离和第三距离求差确定第一位置;则长方形清洁机器人1102到达第一位置还需行走才能到达第一位置。
[0179]
如图11中的(b)图所示,长方形清洁机器人1102行走如图11中的(b)图所示,长方形清洁机器人1102行走到达第一位置,在此长方形清洁机器人1102以驱动轮的中心为中心沿顺时针方向旋转90
°
。
[0180]
如图11中的(c)图所示,长方形清洁机器人1102旋转之后,长方形清洁机器人1102与外直角障碍物第二侧边的夹角为0
°
,长方形清洁机器人1102与外直角障碍物第二侧边的距离为0厘米。
[0181]
如图11中的(d)图所示,长方形清洁机器人1102紧贴外直角障碍物第二侧边继续前进清洁。
[0182]
在一些可能的实现方式中,障碍物传感器可以检测清洁机器人在第一方向的边缘是否与外直角障碍物的第二侧边在同一直线上,而确定需不需要检测障碍物传感器到外直角障碍物交汇处的距离l。
[0183]
可选地,若清洁机器人在第一方向的边缘与外直角障碍物的第二侧边在同一直线上,则清洁机器人只需根据障碍物传感器所在横向中心轴到清洁机器人在第一方向的边缘的距离s以及第三距离来确定清洁机器人到达第一位置还需行走的距离为或在这种情况下,障碍物传感器到外直角障碍物交汇处的距离l=0,第二距离是距离s;
[0184]
若清洁机器人在第一方向的边缘与外直角障碍物的第二侧边不在同一直线上,则清洁机器人需要检测障碍物传感器到外直角障碍物交汇处的距离l。
[0185]
如图12所示,图12以驱动轮1201的横向中心轴远离与清洁机器人前进方向相反的第一方向,且清洁机器人横向最长轴小于清洁机器人纵向最长轴的长方形清洁机器人1202为例,提供了一例长方形清洁机器人的沿边方法。其中,如图12中的(a)图所示,长方形清洁机器人1202沿外直角障碍物第一侧边前进清洁,此时安装于长方形清洁机器人1202上的障碍物传感器1203对外直角障碍物进行检测,当长方形清洁机器人1202检测到检测到外直角障碍物的交汇处时,确定长方形清洁机器人1202要执行旋转动作的第一位置。
[0186]
如图12所示,障碍物传感器1203安装在长方形清洁机器人1202的右侧边缘上,且障碍物传感器1203所在横向轴线距长方形清洁机器人1202前边缘的距离大于障碍物传感器1203所在横向轴线距长方形清洁机器人1202后边缘的距离。
[0187]
在一些可能的实现方式中,障碍物传感器1203向外直角障碍物的第一侧边发射信号,障碍物传感器1203可以检测障碍物传感器1203发射到第一侧边的信号的返回信号,能检测到返回信号,则说明障碍物传感器1203还没有越过外直角障碍物的交汇处或第二侧边;当检测到障碍物传感器1203发射到第一侧边的信号的返回信号突然消失,则说明障碍物传感器1203刚越过外直角障碍物的交汇处或第二侧边。
[0188]
需要理解的是,在这种实现方式中,障碍物传感器不需要检测障碍物传感器1203到外直角障碍物交汇处的距离l。
[0189]
如图12中的(b)图所示,障碍物传感器1203检测到障碍物传感器1203发射到第一侧边的信号的返回信号突然消失,则说明障碍物传感器1203越过外直角障碍物的交汇处或第二侧边。
[0190]
长方形清洁机器人1202根据障碍物传感器1203所在横向中心轴到长方形清洁机器人1202上与长方形清洁机器人1202前进方向相反的第一方向的边缘的距离s9以及第三距离来确定长方形清洁机器人1202到达第一位置还需行走的距离。
[0191]
其中,在这种情况下,距离s9是第二距离。
[0192]
由图12可知,清洁机器人检测到交汇处时,清洁机器人第一方向的边缘与清洁机器人执行原地旋转动作时,清洁机器人第一方向的边缘在第二侧边的同一侧,清洁机器人应将第二距离和第三距离求差确定第一位置;则长方形清洁机器人1202到达第一位置还需行走才能到达第一位置。
[0193]
如图12中的(c)图所示,长方形清洁机器人1202行走到达第一位置,在此长方形清洁机器人1202以驱动轮的中心为中心沿顺时针方向旋转90
°
。
[0194]
如图12中的(d)图所示,长方形清洁机器人1202旋转之后,长方形清洁机器人1202与外直角障碍物第二侧边的夹角为0
°
,长方形清洁机器人1202与外直角障碍物第二侧边的距离为0厘米。
[0195]
如图12中的(e)图所示,长方形清洁机器人1202紧贴外直角障碍物第二侧边继续前进清洁。
[0196]
应理解,如图4至图12提供的实施例中,第二方向是前进方向,第一方向是与前进方向相反的方向;清洁机器人第二方向的边缘是指清洁机器人的前边缘,清洁机器人第一方向的边缘是指清洁机器人的后边缘。
[0197]
应理解,在本申请提供的实施例中,紧贴外直角障碍物第二侧边表示清洁机器人与第二侧边的夹角为[0
°
,5
°
],清洁机器人与第二侧边的距离为[0,2]厘米。
[0198]
应理解,在本申请提供的实施例中,长度单位可以是厘米,也可以是毫米,还可以是分米或米。这对本领域技术人员来说是显而易见的。本申请对此不作限定。
[0199]
如图13所示,本申请实施例还提供了一种装置1300,包括存储器1302、处理器1301,其中,所述存储器1302存储在所述处理器上运行的程序,所述处理器1301用于执行存储器存储的计算机程序或指令,使得上述各个方法实施例中的步骤被执行。
[0200]
可选地,装置1300可以是机器人。
[0201]
应理解,本申请提供的上述实施例虽然只以圆形、正方形和/或长方形清洁机器人为例,但本申请提供的方法也可以应用于三角形、u型、d型和/或椭圆形清洁机器人上,这对于本领域的技术人员来说是显而易见的。本申请对清洁机器人的形状不作限定。
[0202]
本申请实施例还提供一种计算机可读存储介质,其上存储有用于实现上述实施例中的方法的计算机程序(也可称为指令或代码)。
[0203]
本申请实施例还提供一种计算机程序产品,所述计算机程序产品包括计算机程序
(也可称为指令或代码),所述计算机程序被计算机执行时使得所述计算机实现上述实施例中的方法。
[0204]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。
[0205]
以上所述实施例仅用以说明本申请的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围,均应包含在本申请的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1