一种扫地拖地一体化的智能扫地机器人的制作方法
1.本实用新型涉及智能家电技术领域,具体为一种扫地拖地一体化的智能扫地机器人。
背景技术:
2.扫地机器人能够自动完成对地面的清洁工作,现在的扫地机器人往往具备扫拖吸的三种功能,但是经过拖地操作的地面往往很湿滑,需要等待一定时间才能风干,容易造成机器打滑、使用者踩到水渍将地板污染甚至使用者跌倒等问题;并且机器人在地形复杂时会减慢移动速度进行避障,但是水箱仍然保持均匀出水,就会造成此处地面湿滑,如果机器人长时间难以逃脱,可能会造成地板起泡开裂等问题;目前市面上具备拖地功能的扫地机器人往往只能实现拖地的半自动化,使用者需要及时对已经脏污的拖布进行清洗,以保证拖地的效果。
技术实现要素:
3.鉴于现有技术中所存在的问题,本实用新型提供了一种扫地拖地一体化的智能扫地机器人,采用的技术方案是,包括机器人本体和基座,机器人本体内部设有风机、水箱和集尘箱,机器人本体底面前端中部设有万向轮,机器人本体底面万向轮的后面设有两个左右对称设置的刷条,机器人本体底面中部设有开口朝向刷条的长条形的吸尘口,机器人本体底面后端设有带驱动的滚拖装置,滚拖装置包括前后设置的第一滚拖和第二滚拖,第一滚拖位于第二滚拖的前方,第一滚拖和第二滚拖之间设有集污槽,水箱底部设有朝向第一滚拖的喷雾加湿器和颜色传感器,基座内设有第一清洁槽、第二清洁槽、污水箱和净水箱,机器人本体内设有第一控制模块和速度传感器,风机、滚拖装置、喷雾加湿器、颜色传感器和速度传感器均与第一控制模块,基座内设有与第一控制模块通过无线连接的第二控制模块。
4.作为本实用新型的一种优选技术方案,万向轮通过驱动轴与驱动电机相连,吸尘口和滚拖装置之间的底面上设有两个对称的无驱动的从动轮,驱动电机与第一控制模块相连。
5.作为本实用新型的一种优选技术方案,刷条由刷条电机控制驱动,刷条与机器人本体可拆卸相连,吸尘口与集尘箱通过集尘通道相连,集尘箱和风机之间设有过滤网,刷条电机与第一控制模块相连。
6.作为本实用新型的一种优选技术方案,两个滚拖分别与机器人本体可拆卸连接,两个滚拖的一端分别固定连接一个从动齿轮,两个从动齿轮分别与设于从动齿轮上方的两个主动齿轮配合,两个主动齿轮分别由相应的齿轮电机驱动,两个齿轮电机与第一控制模块相连,集污槽的开口朝向第一滚拖。
7.作为本实用新型的一种优选技术方案,水箱与机器人本体可拆卸连接,万向轮和两个从动轮与机器人本体可拆卸连接,集污槽与机器人本体可拆卸连接。
8.作为本实用新型的一种优选技术方案,基座包括底座和竖直箱体,底座水平设置且与竖直箱体的一侧底部固定连接,底座的上表面倾斜,底座远离竖直箱体一侧的高度比底座靠近箱体一侧的高度低,底座靠近竖直箱体的一侧设有第二清洁槽,底座中部设有第一清洁槽,第二清洁槽和第一清洁槽的深度约为第二滚拖和第一滚拖竖直高度的1/3至1/2,第二清洁槽和第一清洁槽的形状和位置分别与第二滚拖和第一滚拖对应,第二清洁槽和第一清洁槽均设有净水入口和污水出口,第一清洁槽和第二清洁槽底面均设有均匀分布的倾斜的凸肋条,第一清洁槽和第二清洁槽侧边均设有超声波发生器和烘干机构,两个超声波发生器和两个烘干机构均与第二控制模块相连。
9.作为本实用新型的一种优选技术方案,竖直箱体内设有可拆卸的净水腔和污水腔,净水腔通过净水泵与两个净水入口相连,污水腔通过污水泵与两个污水入口相连,竖直箱体靠近底座的断面底部设有充电板,充电板、净水泵和污水泵均与第二控制模块相连。
10.作为本实用新型的一种优选技术方案,机器人本体靠近第二滚拖的侧面底端设有充电极片,充电板到第二清洁槽的距离与充电极片到第二滚拖的距离相等。
11.作为本实用新型的一种优选技术方案,第一滚拖和第二滚拖外部均包裹有吸水性和吸污性强的拖布,拖布和第一滚拖、第二滚拖可拆卸连接。
12.作为本实用新型的一种优选技术方案,水箱、集污槽、净水腔和污水腔均设有液位传感器,集尘箱内设有检测容量的超声波传感器,超声波传感器和所有的液位传感器均与第一控制模块或第二控制模块相连。
13.本实用新型的有益效果:本实用新型中,在机器人本体按照设定的路径移动清理地板的过程中,刷条首先将地面上的灰尘和颗粒物吸走,喷雾加湿器将第一滚拖打湿,湿润的第一滚拖转动并拖地,无水的第二滚拖随后将湿润的地板擦干,避免地面湿滑的情况发生;第一控制模块根据速度传感器检测到的机器人本体速度大小控制喷雾加湿器的喷雾量,并以此调整第一滚拖的湿度,避免机器人本体缓慢移动时出水量过大导致地面湿滑的问题;第一滚拖上的污水在滚动过程中在离心力的作用下进入集污槽中,颜色传感器判断第一滚拖的脏污程度,在需要充电或第一滚拖需要清洗时,第一控制模块控制机器人本体停止清洁工作并在万向轮的带动下返回基座,并进行机器人本体充电或滚拖清洗的操作。
附图说明
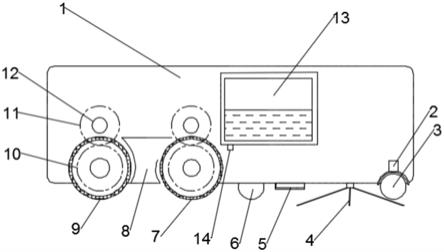
14.图1为本实用新型一种扫地拖地一体化的智能扫地机器人的机器人本体的结构示意图。
15.图2为本实用新型一种扫地拖地一体化的智能扫地机器人的机器人本体的仰视结构示意图。
16.图3为本实用新型一种扫地拖地一体化的智能扫地机器人的基座的侧视结构示意图。
17.图4为本实用新型一种扫地拖地一体化的智能扫地机器人的基座的俯视结构示意图。
18.图中:1
‑
机器人本体、2
‑
驱动轴、3
‑
万向轮、4
‑
刷条、5
‑
吸尘口、6
‑
从动轮、7
‑
第一滚拖、8
‑
集污槽、9
‑
第二滚拖、10
‑
从动齿轮、11
‑
主动齿轮、12
‑
齿轮电机、13
‑
水箱、14
‑
喷雾加湿器、15
‑
充电极片、21
‑
竖直箱体、22
‑
底座、23
‑
充电板、24
‑
净水腔、25
‑
污水腔、26
‑
第二清
洁槽、27
‑
第一清洁槽、28
‑
凸肋条、29
‑
烘干机构、30
‑
超声波发生器。
具体实施方式
19.下面通过具体实施例对本实用新型的技术方案进行详细说明。
20.如图1所示,一种扫地拖地一体化的智能扫地机器人,包括机器人本体1和基座,机器人本体1内部设有风机、水箱13和集尘箱,机器人本体1底面前端中部设有万向轮 3,机器人本体1底面万向轮3的后面设有两个左右对称设置的刷条4,机器人本体1底面中部设有开口朝向刷条4的长条形的吸尘口5,机器人本体1底面后端设有带驱动的滚拖装置,滚拖装置包括前后设置的第一滚拖7和第二滚拖9,第一滚拖7位于第二滚拖9的前方,第一滚拖7和第二滚拖9之间设有集污槽8,水箱13底部设有朝向第一滚拖7的喷雾加湿器14和颜色传感器,基座内设有第一清洁槽27、第二清洁槽26、污水箱13和净水箱 13,机器人本体1内设有第一控制模块和速度传感器,风机、滚拖装置、喷雾加湿器14、颜色传感器和速度传感器均与第一控制模块,基座内设有与第一控制模块通过无线连接的第二控制模块。
21.优选的,万向轮3通过驱动轴2与驱动电机相连,吸尘口5和滚拖装置之间的底面上设有两个对称的无驱动的从动轮6,驱动电机与第一控制模块相连。
22.优选的,刷条4由刷条4电机控制驱动,刷条4与机器人本体1可拆卸相连,吸尘口5与集尘箱通过集尘通道相连,集尘箱和风机之间设有过滤网,刷条4电机与第一控制模块相连。。
23.优选的,两个滚拖分别与机器人本体1可拆卸连接,两个滚拖的一端分别固定连接一个从动齿轮10,两个从动齿轮10分别与设于从动齿轮10上方的两个主动齿轮11配合,两个主动齿轮11分别由相应的齿轮电机12驱动,两个齿轮电机12与第一控制模块相连,集污槽8的开口朝向第一滚拖7。
24.优选的,水箱13与机器人本体1可拆卸连接,万向轮3和两个从动轮6与机器人本体1可拆卸连接,集污槽8与机器人本体1可拆卸连接。
25.优选的,基座包括底座22和竖直箱体21,底座22水平设置且与竖直箱体21的一侧底部固定连接,底座22的上表面倾斜,底座22远离竖直箱体21一侧的高度比底座22靠近箱体一侧的高度低,底座22靠近竖直箱体21的一侧设有第二清洁槽26,底座22中部设有第一清洁槽27,第二清洁槽26和第一清洁槽27的深度约为第二滚拖9和第一滚拖7竖直高度的1/3至1/2,第二清洁槽26和第一清洁槽27的形状和位置分别与第二滚拖9和第一滚拖7对应,第二清洁槽26和第一清洁槽27均设有净水入口和污水出口,第一清洁槽27 和第二清洁槽26底面均设有均匀分布的倾斜的凸肋条28,第一清洁槽27和第二清洁槽26 侧边均设有超声波发生器30和烘干机构29,两个超声波发生器30和两个烘干机构29均与第二控制模块相连。
26.优选的,竖直箱体21内设有可拆卸的净水腔24和污水腔25,净水腔24通过净水泵与两个净水入口相连,污水腔25通过污水泵与两个污水入口相连,竖直箱体21靠近底座22的断面底部设有充电板23,充电板23、净水泵和污水泵均与第二控制模块相连。
27.优选的,机器人本体1靠近第二滚拖9的侧面底端设有充电极片15,充电板23到第二清洁槽26的距离与充电极片15到第二滚拖9的距离相等。
28.优选的,第一滚拖7和第二滚拖9外部均包裹有吸水性和吸污性强的拖布,拖布和
第一滚拖7、第二滚拖9可拆卸连接。
29.优选的,水箱13、集污槽8、净水腔24和污水腔25均设有液位传感器,集尘箱内设有检测容量的超声波传感器,超声波传感器和所有的液位传感器均与第一控制模块或第二控制模块相连。
30.本实用新型的工作原理:用户在水箱13和净水腔24中加入足量的清水,驱动电机通过驱动轴2控制万向轮3转动,并带动机器人本体1沿设定的路径运动,两个从动轮6与主动轮一起转动,保证机器人本体1运动的稳定性;刷条4电机带动两个刷条4转动并将垃圾带到吸尘口5,风机启动将垃圾从吸尘口5吸入并沿着集尘通道进入集尘箱;喷雾加湿器 14将水箱13中的水喷洒在第一滚拖7上,湿润的第一滚拖7对地面进行清洁,拖地留下的水渍由后面干燥无水的第二滚拖9吸干,在清理地面的同时也能够保证地面的干燥;第一滚拖7上的过程中,污水离心力的作用下进入集污槽8中,完成第一滚拖7的初步清洁,工作过程中,颜色传感器将第一滚拖7的颜色数据传输给第一控制模块,若第一滚拖7的脏污程度过高或机器人本体1的电量过低,控制模块将控制刷条4电机、风机、齿轮电机12停止工作,机器人本体1返回基座进行清洗或充电。机器人本体1移动到倾斜的底座22上,并将后部的第一滚拖7和第二滚拖9分别卡入第一清洁槽27和第二清洁槽26中,同时机器人本体1后部的充电极片15恰好紧贴竖直箱体21侧壁的充电板23,此时可同时进行充电和清洁工作;清洗时,净水腔24中的净水通过净水水泵进入第一清洁槽27和第二清洁槽26 中,超声波发生器30启动,两个齿轮电机12启动并带动两个主动齿轮11转动,再带动两个下方的从动齿轮10并带动第一滚拖7和第二滚拖9转动,凸肋条28和超声波将第一滚拖 7和第二滚拖9上的污渍清理干净后,污水水泵将污水吸入污水腔25;若地面未清洁完毕,第二清洁槽26旁的烘干机构29将第二滚拖9干燥,且充电完毕后,机器人本体1离开基座继续进行清洁工作;若地面清洁完毕,第一清洁槽27和第二清洁槽26旁的烘干机构29分别将第一滚拖7和第二滚拖9干燥,机器人本体1充满电后整体关机。若液位传感器检测到水箱13或净水腔24的水量过低,机器人本体1或基座将停止工作并发出响声以提醒用户添加净水,若液位传感器或超声波传感器检测到污水腔25、集污槽8或集尘箱已满,机器人本体1或基座将停止工作并发出响声以提醒用户进行清理;地面清洁结束后,用户无需将滚拖拆下进行清洗,只需将污水腔25和集污腔中的污水倒出即可,无需清洗拖布,实现了扫地机器人的自清洁,减轻了用户的负担;刷条4、万向轮3、两个从动轮6和两个滚拖均可拆卸,方便进行清理或更换;两个从动轮10和万向轮33构成三角形结构,可保证机器人本体1运动时的稳定性,减少打滑。
31.本文中未详细说明的技术为现有技术。
32.上述虽然对本实用新型的具体实施例作了详细说明,但是本实用新型并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化,而不具备创造性劳动的修改或变形仍在本实用新型的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1