一种驱动组件及具有其的清洁机器人的制作方法
1.本技术涉及清洁机器人技术领域,尤其涉及一种驱动组件及采用该驱动组件的清洁机器人。
背景技术:
2.在当今环境下,清洁机器人市场竞争愈发激烈,用户对清洁机器人小型化、紧凑化的要求越来越高。这使得清洁机器人结构的空间压力和成本压力变得尤为明显。
3.清洁机器人的驱动轮需要相对清洁机器人的底座转动,从而适应不同的清洁面。传统的清洁机器人的驱动组件为模块化设计,将包括驱动轮和驱动电机及枢转结构的组件集成在一起,整体安装在清洁机器人的底座上,结构复杂,不利于清洁机器人的小型化。
技术实现要素:
4.针对上述技术中存在的不足之处,本技术提供了一种用于清洁机器人的体积小巧,结构简单的驱动组件。
5.为解决上述技术问题,本技术采用的技术方案是:
6.一种用于清洁机器人的驱动组件,所述驱动组件包括:
7.用于与所述清洁机器人的底座枢转连接的旋转支架和设置在所述旋转支架上的行走轮和电机,所述电机用于驱动所述行走轮转动;
8.所述旋转支架上连接有用于与所述底座枢转连接的旋转轴;
9.还包括弹性件,一端用于与所述底座连接,另一端连接所述旋转支架,用于向所述旋转支架施加使所述行走轮向凸出于所述底座方向转动的弹性力。
10.在其中一优选的实施例中,还包括轮罩,所述轮罩遮罩于所述行走轮的上方,且于所述轮罩的顶部设置有暴露所述行走轮的镂空区域。
11.在其中一优选的实施例中,所述轮罩的顶部边缘与所述行走轮的顶部大致相切。
12.在其中一优选的实施例中,所述驱动组件在所述行走轮旋转平面上的投影的最大宽度不大于所述行走轮的直径。
13.在其中一优选的实施例中,所述旋转轴位于所述驱动组件长度方向上的最远端。
14.本技术还提供了一种清洁机器人,所述清洁机器人包括用于支撑清洁工作头的底座,所述底座上形成有至少部分向下敞开的收容腔,包括根据上述任一实施例所述的驱动组件,所述驱动组件设置于所述收容腔内。
15.在其中一优选的实施例中,所述收容腔的壁上形成有用于枢转连接所述旋转轴的支撑部。
16.在其中一优选的实施例中,所述收容腔的侧壁上设置有用于连接所述弹性件的连接件。
17.在其中一优选的实施例中,所述弹性件为拉簧,所述连接件具体为设置在所述收容腔的侧壁上的第一拉簧挂钩,所述旋转支架上设置有第二拉簧挂钩,所述拉簧一端与所
述第一拉簧挂钩连接,另一端连接所述第二拉簧挂钩,当所述行走轮在外力作用下缩回至所述收容腔,所述拉簧处于拉伸状态。
18.在其中一优选的实施例中,所述驱动组件包括缩回所述收容腔的第一极限位置和伸出所述收容腔的第二极限位置,所述驱动组件在所述第一极限位置和所述第二极限位置转动过程中,所述第一拉簧挂钩和所述第二拉簧挂钩始终位于所述驱动组件长度方向上所述旋转轴的同一侧。
19.本技术与现有技术相比,其有益效果是:
20.本技术提供的驱动组件及具有其的清洁机器人,其将连接有行走轮及用于驱动行走轮的电机均连接在旋转支架上,通过弹性件和旋转轴将旋转支架直接与清洁机器人的底座连接,从而实现行走轮和电机枢转连接在清洁机器人的底座上,结构简单,体积小巧,能够进一步降低清洁机器人的体积和结构成本;此外,轮罩顶部边缘镂空,能够在不影响其功能的情况下,进一步缩小扫地机厚度方向的尺寸,有利于清洁机器人的减薄。
附图说明
21.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。其中:
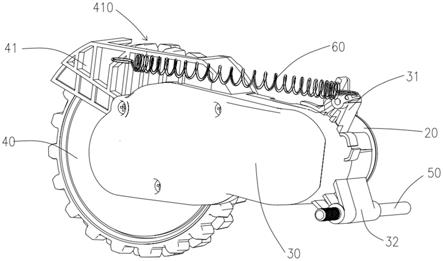
22.图1是本技术提出的驱动组件的立体结构示意图;
23.图2是本技术提出的安装有图1所示的驱动组件的清洁机器人的部分结构剖面示意图;
24.图3是图2所示的清洁机器人的驱动组件处的另一角度的部分剖面结构示意图;
25.图4是图3所示的清洁机器人抬起状态下的驱动组件的结构示意图。
具体实施方式
26.为使本技术的上述目的、特征和优点能够更为明显易懂,下面结合附图,对本技术的具体实施方式做详细的说明。可以理解的是,此处所描述的具体实施例仅用于解释本技术,而非对本技术的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分而非全部结构。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
27.本技术中的术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
28.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
29.请参见图1,本技术一实施例提供了一种用于清洁机器人的驱动组件,该驱动组件
包括行走轮40,电机20,旋转支架30。
30.其中,电机20用于驱动行走轮40转动,从而驱动清洁机器人前进或后退。因此,行走轮40也可称之为驱动轮。
31.请一并参见图2,旋转支架30用于与清洁机器人的底座10枢转连接。具体的,旋转支架30上连接有用于与底座10枢转连接的旋转轴50,旋转支架30可相对清洁机器人的底座10转动,从而适应不同的地面状态。行走轮40和电机20均设置在旋转支架30上,从而与旋转支架30 而一起转动。
32.进一步的,驱动组件还包括弹性件60,一端用于与底座10连接,另一端连接旋转支架30,用于向旋转支架30施加使行走轮40向凸出于所述底座10方向转动的弹性力。在一种工作场景中,当遇到清洁面坑洼时,弹性件能够对行走轮40施加弹性力,使其向下凸出从而保持行走轮40保持与地面的接触。
33.本实施例提供的驱动组件,其将连接有行走轮40及用于驱动行走轮40的电机20均连接在旋转支架30上,通过弹性件60和旋转轴50 将旋转支架30直接与清洁机器人的底座10连接,从而实现行走轮40 和电机20枢转连接在清洁机器人的底座10上,结构简单,体积小巧,能够进一步降低清洁机器人的体积和结构成本。
34.进一步的,驱动组件还包括轮罩41,轮罩41遮罩于行走轮40的上方,用于剥离和黏在行走轮40上的异物。为了减小轮罩41的设置对驱动组件体积的不利影响,轮罩41的顶部还设置有暴露行走轮40的镂空区域410,该镂空区域410具体为设置在轮罩41定部的开口,一方面降低了轮罩的高度,另一方面也降低了材料成本。
35.更进一步的,轮罩41的顶部边缘与行走轮40的顶部大致相切。保证了轮罩41不高于行走轮40的高度,不会增加驱动组件在高度方向上的尺寸。
36.本实施例中,驱动组件装配于清洁机器人上,请参见图2,行走轮 40用于支撑清洁机器人,其转动平面大致垂直于清洁机器人的底座10,以图2所示图纸的上下方向为驱动组件的高度方向,因此驱动组件在高度方向的尺寸影响清洁机器人的厚度,为了降低驱动组件对清洁机器人厚度的不利影响,有必要提供一种在高度方向上尺寸小的驱动组件。然而清洁机器人为了保证一定的抓地力,行走轮40不宜做的太小。本技术一实施例提供的驱动组件在高度方向的尺寸不大于行走轮40的直径,也就是说,驱动组件在高度方向的最大尺寸由行走轮40的直径决定,而旋转支架、轮罩等其他结构的布置都没有增加驱动组件在高度方向的尺寸,因此在选择兼顾抓地力和尺寸大小的行走轮后,驱动组件除行走轮外的任意部分均不增加其在高度方向的尺寸,从而驱动组件在高度方向的尺寸实现小型化。
37.可以理解的,驱动组件相对清洁机器人的底座枢转设置,其旋转轴的设置位置决定了驱动组件在旋转过程中转过的空间轨迹,为了降低驱动组件的转动所需要的空间,本实施例中,旋转轴50位于驱动组件长度方向上的最远端。具体位于,驱动组件长度方向最远端的下方。
38.本技术还提出了一种采用上述任一实施例提供的驱动组件的清洁机器人,请参见图2到图4,清洁机器人包括用于支撑清洁工作头的底座10,底座10上形成有至少部分向下敞开的收容腔11,驱动组件设置于收容腔11内。
39.具体的,收容腔11的壁上形成有用于枢转连接旋转轴50的支撑部。更具体的,支撑部设置在收容腔侧壁的下部。旋转支架30通过旋转轴 50直接与底座10枢转连接,减少了中
间零件的数量和成本,结构简单。
40.为了进一步减少中间零件,本实施例中,收容腔11的侧壁上设置有用于连接弹性件60的连接件。具体而言,请参见图3,所述弹性件为拉簧,所述连接件具体为设置在所述收容腔11的侧壁上的第一拉簧挂钩12,所述旋转支架30上设置有第二拉簧挂钩31,拉簧一端与第一拉簧挂钩12连接,另一端连接第二拉簧挂钩31,当行走轮40在外力作用下缩回至所述收容腔11,所述拉簧处于拉伸状态。
41.可以理解的,驱动组件相对清洁机器人的底座10枢转设置,在转动过程中,驱动组件的全部结构围绕旋转轴50转动,因此收容腔11要预留驱动组件转动路径的空间。本实时例中,驱动组件包括缩回收容腔 11的第一极限位置和伸出收容腔11的第二极限位置,驱动组件在第一极限位置和第二极限位置转动过程中,第一拉簧挂钩12和第二拉簧挂钩31始终位于清洁机器人前进方向上旋转轴50的同一侧。如此,驱动组件的转动过程中,凸出设置的第一拉簧挂钩12和第二拉簧挂钩31不会增加驱动组件的占用的空间。
42.综上所述,本技术提供的驱动组件,结构简单,体积小巧,用于安装在清洁机器人上,需要的空间小,因此有利于清洁机器人的体积的小型化。
43.以上所述仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1