覆膜式鞋套机及其塑料膜传输机构的制作方法
1.本实用新型属于鞋套穿戴设备技术领域,特别涉及一种覆膜式鞋套机及其塑料膜传输机构。
背景技术:
2.cn200980124358.2公开了一种鞋套机及用鞋套机覆膜的方法,它的目的是提供一种热缩膜的切割、输送工作稳定,覆膜速度快,覆膜效果理想的鞋套机。它的另一目的是提供一种利用上述鞋套机对鞋子进行覆膜的方法。该技术方案:鞋套机,鞋套机机壳中装有热缩膜的安装架,热缩膜由输送装置输送到踏板上,鞋套机中设有覆膜装置,覆膜装置中设有加热装置,所述的加热装置包括热空气容腔,热空气容腔中设有热空气风道,踏板封闭热空气风道,热空气风道的进风口设有风扇,热空气风道中设有发热器,热空气容腔外设有隔热层,踏板升降机构中设有复位器,控制系统控制风扇和热空气容腔中热空气的温度。用鞋套机覆膜的方法;当鞋子触压踏板时,热缩膜的中心部分随着鞋子及踏板下降,其边缘部分围着鞋的四周呈包裹状,热缩膜完成预成型,同时,踏板受压下降,踏板打开热空气容腔的出口或热空气风道;此时,控制系统控制风扇工作,风扇送入的环境空气经发热器加热,汇集贮存在热空气风道中的热空气,吹向热缩膜的边缘部分,热缩膜遇热后围绕鞋的四周收缩,实现对鞋周围即时覆膜;当覆膜完成或鞋离开踏板时,控制系统控制风扇关闭,踏板在复位器的作用下封闭热空气容腔的出口或热空气风道,热缩膜被输送装置再次输送到踏板上方,此时,控制系统控制发热器对热空气风道中的空气加热,覆膜装置回复至待机状态;当覆膜装置处于待机状态时,发热器在控制系统的控制下根据预设的目标温度周期性工作,补充在待机状态时热空气容腔中的热量损失;所述的输送装置在输送过程中,输送电机通过二次动作实现热缩膜的准确定位,第一次动作时,输送电机启动,把热缩膜从膜卷中拉出;当热缩膜被拉出适合的尺寸时,输送电机关闭,切割电机启动切割热缩膜;切割电机关闭后,输送电机第二次启动,直至将热缩膜送到位后停止。其不足之处是:
⑴
开机时需要长时间的等待,直到热空气容腔内的空气温度达到要求才可以正常使用。
⑵
机器在待机时也需要一直保持热空气容腔内的空气恒温,因此需要持续供电加热,特别是在长时间待机时,将会浪费大量的电能。
⑶
热缩膜在传送时是通过输送轮根据转动的圈数来计算塑料膜的长度的,该实用新型为了计算输送长度,确保热缩膜在输达时不能滑动,设置了两对将热缩膜紧紧压住的输送轮,如果使用带有凸凹点的防滑热缩膜,则紧紧压住的输送轮就会把热收缩膜上的凹凸点压平。因此该实用新型的输送膜只能是平滑的热缩膜,而平滑的热缩膜套在使用者的脚上行走时,特别是在光滑的地板上行走,存在较大的滑倒风险。
⑷
市面上常见的一种鞋套机是将己制造成成品的鞋套预放置于鞋套机内,人工张开后套在鞋套机内,或通过鞋套机自动张开,使用者脚踩进去穿戴鞋套,这种机器的缺点是要把鞋套按一定要求制做好,包括折叠成指定的形状尺寸,或者在鞋套上钩上指定的扣子,这种方法的鞋套成本高,制作麻烦。
技术实现要素:
3.本实用新型的目的是提供一种适用于各种有洁净要求的场所,包裹于鞋底的塑料膜成本低,不需要提前制作成鞋套成品,也不需要安装扣子,使用时自动切断,自动收缩在鞋底和鞋四周包裹塑料膜的覆膜式鞋套机。本实用新型的另一目的是提供一种低能耗高效率低成本的覆膜式鞋套机的塑料膜传输机构。
4.本实用新型的技术解决方案是所述覆膜式鞋套机,包括热风发生器、塑料膜传输机构,热风发生器控制电路,设置在热风发生器顶部的脚踏区,位于脚踏区一侧依次设有塑料膜传输机构和塑料膜卷辊,其特殊之处在于,所述热风发生器的风管出风口设置在脚踏区的两侧或四周,脚踏板由弹簧支撑并设置在风管出风口上方,脚踏板下安装有脚踏开关;当脚踏板下降时触发脚踏开关,脚踏板在使用者的踩踏力的作用下下降,脚踏板降到风管出风口的下方后停止,控制器让加热器开始加热,风机开始工作,风机吹出的风经加热器加热后吹到脚的四周,塑料膜受热后收缩,包住鞋底及四周,完成一次穿戴;所述塑料膜传输机构由协同作业的切刀模块和传送机构、传输机构控制电路组成。
5.作为优选:所述热风发生器由温度传感器、风机、风机出风口连接的转接密闭盒、转接密闭盒上连接的多组风管、风管内安装有加热器组成。
6.作为优选:所述热风发生器控制电路包括控制器、分别与所述控制器电连接的加热器、风机、热风温度传感器、环境温度传感器和脚踏开关;当脚踩入脚踏板时,触发脚踏开关,控制器通过环境温度传感器检测到的环境温度,选择合适的供电频率给加热器供电,同时风机开始工作,往风管内送自然风,自然风穿过被加热的加热器后变成热风,从出风口吹出去,吹到使用者的脚上,脚四周的热收缩塑料膜在热风的作用下收缩,包裹在鞋底和四周;热风温度传感器将检测到的温度反馈到控制器上,控制器根据反馈的温度来调整给加热器的供电频率或给加热器断电;当脚抬起时或吹热风达到设定时间时,控制器停止给风机和加热器供电,停止工作。
7.作为优选:所述加热器采用脉冲供电方式供电加热,当机器开始工作时,先通过环境温度传感器采集环境温度,根据环境温度来确定加热丝的供电的脉冲频率;当环境温度低时,吹进加热器内的空气温度低,所述控制电路给加热器提供更多更密集的电脉冲,以产生足够的热量,保证自然风被及时加热到设定的温度;而当环境温度比较高时,所述控制电路则降低加热器的供电频率,确保出风口的温度恒温。
8.作为优选:在出风口附近安装热风温度传感器,用于检测出风口的温度,热风温度传感器将检测的温度反馈给控制器,及时调整加热器的供电频率,确保出风口的空气温度保持在设定的温度范围内。
9.作为优选:所述切刀模块包括一对主动压板、位于一对主动压板的上方对齐固设在机芯上不能移动的一对被动压板、一对主动压板之间与一对被动压板之间的分别成型的纵向隔腔与横向隔腔、主动压板底部通过弹簧连接的刀架、刀架凹设与所述纵向隔腔贯通的切刀插槽、刀架位于切刀插槽的端部分别沿压板平行方向外延的一对凸耳、置入切刀插槽中的切刀、切刀与凸耳之间连接的复位弹簧、固设于机芯的支承座、位于凸耳两侧的刀架端部分别连接滑动升降柱一端的端部、滑动升降柱与压板垂直设置,支承座上开设供滑动升降柱定位移动的穿孔;位于所述横向隔腔侧设有引导塑料膜传输的导向槽,所述导向槽把塑料膜引导至切刀模块内主动压板与被动压板之间的空隙中。
10.作为优选:所述传送机构包括一对铰接传动片,所述一对铰接传动片的一端端部枢接滑动升降柱另一端的端部,所述一对铰接传动片的另一端分别枢接一对偏心轮、同心轴两轴端分别连接所述偏心轮,同心轴上固设传动轮、所述传动轮通过传动皮带连接第二电机,位于所述导向槽入口部位设置的一对用于夹设和传输塑料膜带的被动输送轮与主动输送轮,所述主动输送轮通过传动皮带连接的第一电机,用于检测塑料膜定位标识并设置在导向槽底部的传感器。
11.作为优选:所述传输机构控制电路包括控制器、分别与所述控制器电连接的第一电机、第二电机、塑料膜定位传感器和偏心轮定位传感器;当开机时或用完一片热收缩塑料膜时,控制器开始驱动第一电机,带动主动输送轮正向转动,在被动输送轮的配合下,将热收缩塑料膜往前推动,经导向槽和主动压板与被动压板之间的间隙后,推向脚踏板;当塑料膜定位传感器检测到热收缩塑料膜上的定位标识时,发送电信号给控制器,控制器停止给第一电机供电,同时第二电机开始工作,带动偏心轮转动,偏心轮推动切刀模块上升,在主动压板和被动压板压紧热收缩塑料膜后,切刀切断热收缩塑料膜,在偏心轮的转动下,切刀模块整体下降,转动到下定位点时,触发偏心轮定位传感器,偏心轮定位传感器发送电信号给控制器,以停止给第二电机供电;此时送膜和切断动作全部完成,等待再次使用。
12.作为优选:所述塑料膜预制成凹凸点的防滑纹,所述塑料膜上间隔设置设定长度的定位标识,所述传送机构导向槽底部设置传感器,在塑料膜传输过程中,所述传感器检测到所述定位标识后,将信号传输给控制器,控制器发出停止传送并切断的指令;或者,输送轮根据转动的圈数,计算塑料膜的长度,达到设定长度后由控制器发出停止传送并切断的指令。
13.本实用新型的技术解决方案是所述覆膜式鞋套机的塑料膜传输机构,其特殊之处在于,所述塑料膜传输机构由协同作业的切刀模块和传送机构、传输机构控制电路组成;所述切刀模块包括一对主动压板、位于一对主动压板的上方对齐固设在机芯上不能移动的一对被动压板、一对主动压板之间与一对被动压板之间的分别成型的纵向隔腔与横向隔腔、主动压板底部通过弹簧连接的刀架、刀架凹设与所述纵向隔腔贯通的切刀插槽、刀架位于切刀插槽的端部分别沿压板平行方向外延的一对凸耳、置入切刀插槽中的切刀、切刀与凸耳之间连接的复位弹簧、固设于机芯的支承座、位于凸耳两侧的刀架端部分别连接滑动升降柱一端的端部、滑动升降柱与压板垂直设置,支承座上开设供滑动升降柱定位移动的穿孔;位于所述横向隔腔侧设有引导塑料膜传输的导向槽,所述导向槽把塑料膜引导至切刀模块内主动压板与被动压板之间的空隙中;
14.所述传送机构包括一对铰接传动片,所述一对铰接传动片的一端端部枢接滑动升降柱另一端的端部,所述一对铰接传动片的另一端分别枢接一对偏心轮、同心轴两轴端分别连接所述偏心轮,同心轴上固设传动轮、所述传动轮通过传动皮带连接第二电机,位于所述导向槽入口部位设置的一对用于夹设和传输塑料膜带的被动输送轮与主动输送轮,所述主动输送轮通过传动皮带连接的第一电机,用于检测塑料膜定位标识并设置在导向槽底部的传感器;
15.所述传输机构控制电路包括控制器、分别与所述控制器电连接的第一电机、第二电机、塑料膜定位传感器和偏心轮定位传感器;当开机时或用完一片热收缩塑料膜时,控制器开始驱动第一电机,带动主动输送轮正向转动,在被动输送轮的配合下,将热收缩塑料膜
往前推动,经导向槽和主动压板与被动压板之间的间隙后,推向脚踏板;当塑料膜定位传感器检测到热收缩塑料膜上的定位标识时,发送电信号给控制器,控制器停止给第一电机供电,同时第二电机开始工作,带动偏心轮转动,偏心轮推动切刀模块上升,在主动压板和被动压板压紧热收缩塑料膜后,切刀切断热收缩塑料膜,在偏心轮的转动下,切刀模块整体下降,转动到下定位点时,触发偏心轮定位传感器,偏心轮定位传感器发送电信号给控制器,以停止给第二电机供电;此时送膜和切断动作全部完成,等待再次使用。
16.与现有技术相比,本实用新型的有益效果:
17.⑴
本实用新型没有热空气容腔,所以不需要给热空气容腔内的空气预热,因此开机时无需等待,与现有技术相比较节约了开机等待时间。
18.⑵
本实用新型在待机时不需要保持热空气容腔内的空气恒温,因此待机时不消耗电能,与现有技术相比节约了大量的电能。
19.⑶
本实用新型通过识别热收缩塑料膜上的标识来判定热收缩塑料膜的输送长度,因此对输送轮的压力要求低,允许热收缩塑料膜在传送时与输送轮有相对滑动,因此可以使用带有凸凹点的防滑热缩膜,有效的降低了使用者穿戴后行走时滑倒的可能性,提升了安全性。
20.⑷
本实用新型加热器采用脉冲供电方式供电加热,而不是一直持续供电加热,当机器开始工作时,先通过环境温度传感器采集环境温度,根据环境温度来确定加热丝的供电的脉冲频率。不管环境温度是高还是低,本实用新型的出风口温度均在特定的温度范围内,因此当环境温度低时,吹进加热器内的空气温度低,则需要给加热器提供更多更密集的电脉冲,以用于产生足够多的热量,保证冷风能被及时的加热到特定的温度。而当环境温度比较高时,则需要适当的降低加热器的供电频率,确保出风口的温度不会超温。
附图说明
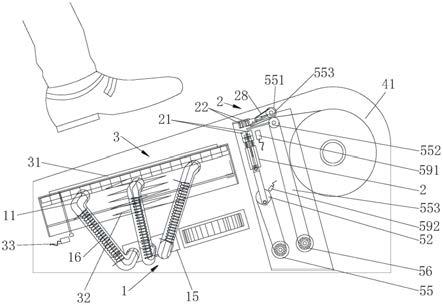
21.图1是本实用新型覆膜式鞋套机的结构示意图;
22.图2是本实用新型热风发生器的结构示意图;
23.图3是本实用新型热风发生器装入覆膜式鞋套机内的结构示意图;
24.图4是本实用新型热风发生器的自然风加热后吹到脚的四周的示意图;
25.图5是本实用新型电热部分的控制电路图;
26.图6是本实用新型切刀模块传动的结构示意图;
27.图7是本实用新型切刀的结构示意图;
28.图8是本实用新型塑料膜传输机构的控制电路图;
29.图9是本实用新型切刀模块的结构示意图;
30.图10是本实用新型塑料膜的结构示意图;
31.图11是本实用新型切刀模块导向槽的结构示意图;
32.图12是本实用新型切刀模块被动输送轮与主动输送轮的配置结构示意图;
33.图13是本实用新型切刀模块中塑料膜被夹在主动输送轮与被动输送轮之间,主动轮转动时把塑料膜先推送进导向槽内,再穿过切刀模块推向加热箱的脚踩板上的结构示意图。
34.主要组件符号说明:
35.热风发生器1
ꢀꢀꢀꢀꢀꢀꢀ
风管11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
出风口111
ꢀꢀꢀꢀꢀꢀꢀ
风机12
36.环境温度传感器13
ꢀꢀ
热风温度传感器14
ꢀꢀ
转接密闭盒15
ꢀꢀꢀꢀ
加热器16
37.控制器17
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
切刀模块2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
主动压板21
ꢀꢀꢀꢀꢀꢀ
被动压板22
38.纵向隔腔231
ꢀꢀꢀꢀꢀꢀꢀ
横向隔腔232
ꢀꢀꢀꢀꢀꢀꢀ
弹簧24
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
刀架25
39.切刀插槽251
ꢀꢀꢀꢀꢀꢀꢀ
凸耳252
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
切刀253
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
复位弹簧254
40.支承座26
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
穿孔261
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滑动升降柱27
ꢀꢀꢀꢀ
导向槽28
41.脚踏区3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
脚踏板31
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
弹簧32
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
脚踏开关33
42.塑料膜卷辊4
ꢀꢀꢀꢀꢀꢀꢀ
塑料膜41
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
定位标识411
ꢀꢀꢀꢀꢀ
传送机构5
43.铰接传动片51
ꢀꢀꢀꢀꢀꢀ
偏心轮52
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
同心轴53
ꢀꢀꢀꢀꢀꢀꢀꢀ
传动轮54
44.传动皮带541
ꢀꢀꢀꢀꢀꢀꢀ
第二电机55
ꢀꢀꢀꢀꢀꢀꢀꢀ
被动输送轮551
ꢀꢀꢀ
主动输送轮552
45.传动皮带553
ꢀꢀꢀꢀꢀꢀꢀ
第一电机56
ꢀꢀꢀꢀꢀꢀꢀꢀ
控制器57
46.塑料膜定位传感器591
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
偏心轮定位传感器592
具体实施方式
47.本实用新型下面将结合附图作进一步详述:
48.请参阅图1所示,该覆膜式鞋套机,包括热风发生器1、塑料膜传输机构,热风发生器控制电路,设置在热风发生器1顶部的脚踏区3,位于脚踏区3一侧依次设有塑料膜传输机构和塑料膜卷辊4,所述热风发生器1的风管11出风口111设置在脚踏区3的两侧或四周,脚踏板31由弹簧32支撑并设置在风管出风口111上方,脚踏板31下安装有脚踏开关33,当脚踏板 31下降时触发脚踏开关33,脚踏板31在使用者的踩踏力的作用下下降,脚踏板31降到风管出风口111的下方后停止,控制器17让加热器16开始加热,风机12开始工作,风机12吹出的风经加热器16加热后吹到脚的四周 (请参阅图4所示),塑料膜41受热后收缩,包住鞋底及四周,完成一次穿戴;所述塑料膜传输机构由协同作业的切刀模块2和传送机构5、传输机构控制电路组成;所述塑料膜41预制成有凹凸点的防滑纹412,当塑料膜41 包裹在鞋底后,起到防滑作用。
49.请参阅图2、图3、图4所示,所述热风发生器1由设置在覆膜式鞋套机内的环境温度传感器13、热风温度传感器14、风机12、风机出风口111 连接的转接密闭盒15、转接密闭盒15上连接的多组风管11、风管11内安装的加热器16组成。
50.请参阅图5所示,所述热风发生器1控制电路包括控制器17、分别与所述控制器17电连接的加热器16、风机12、热风温度传感器14、环境温度传感器13和脚踏开关33;当脚踩入脚踏板31时,触发脚踏开关33,控制器17通过环境温度传感器13检测到的环境温度,选择合适的供电频率给加热器16供电,同时风机12开始工作,往风管11内送自然风,自然风穿过被加热的加热器16后变成热风6,从出风口111吹出去,吹到使用者的脚上,脚四周的热收缩塑料膜41在热风6的作用下收缩,包裹在鞋底和四周;风管出风口111安装的热风温度传感器14将检测到的温度反馈到控制器17上,控制器17根据反馈的温度来调整给加热器16的供电频率或给加热器16断电;当脚抬起时或吹热风6达到设定时间时,控制器17停止给风机12和加热器16供电,停止工作。
51.请参阅图6、图7、图11所示,所述切刀模块2包括一对主动压板21、位于一对主动压板21的上方对齐固设在机芯上不能移动的一对被动压板 22、一对主动压板21之间与一对
被动压板22之间的分别成型的纵向隔腔 231与横向隔腔232、主动压板21底部通过弹簧24连接的刀架25、刀架 25凹设与所述纵向隔腔231贯通的切刀插槽251、刀架25位于切刀插槽251 的端部分别沿压板平行方向外延的一对凸耳252、置入切刀插槽251中的切刀253、切刀253与凸耳252之间连接的复位弹簧254、固设于机芯的支承座26、位于凸耳252两侧的刀架25端部分别连接滑动升降柱27一端的端部、滑动升降柱27与压板垂直设置,支承座26上开设供滑动升降柱27定位移动的穿孔261;位于所述横向隔腔232侧设有引导塑料膜41传输的导向槽28,所述导向槽28把塑料膜41引导至切刀模块内主动压板21与被动压板22之间的空隙中。
52.请参阅图6、图12所示,所述传送机构5包括一对铰接传动片51,所述一对铰接传动片51的一端端部枢接滑动升降柱27另一端的端部,所述一对铰接传动片51的另一端分别枢接一对偏心轮52、同心轴53两轴端分别连接所述偏心轮52,同心轴53上固设传动轮54、所述传动轮54通过传动皮带541连接第二电机55,位于所述导向槽28入口部位设置的一对用于夹设和传输塑料膜41带的被动输送轮551与主动输送轮552,所述主动输送轮551通过传动皮带553连接的第一电机56,用于检测塑料膜41定位标识411并设置在导向槽28底部的传感器591。
53.请参阅图8、图13所示,所述传输机构控制电路包括控制器57、分别与所述控制器电连接的第一电机56、第二电机55、塑料膜定位传感器591 和偏心轮定位传感器592;当开机时或用完一片热收缩塑料膜时,控制器 57开始驱动第一电机56,带动主动输送轮552正向转动,在被动输送轮551 的配合下,将热收缩塑料膜41往前推动,经导向槽28和主动压板21与被动压板22之间的间隙后,推向脚踏板31;当塑料膜定位传感器591检测到热收缩塑料膜41上的定位标识411时,发送电信号给控制器57,控制器 57停止给第一电机56供电,同时第二电机55开始工作,带动偏心轮52转动,偏心轮52推动切刀模块2上升,在主动压板21和被动压板22压紧热收缩塑料膜41后,切刀253切断热收缩塑料膜41,在偏心轮52的转动下,切刀模块2整体下降,转动到下定位点时,触发偏心轮定位传感器592,偏心轮定位传感器592发送电信号给控制器57,以停止给第二电机55供电;此时送膜和切断动作全部完成,等待再次使用。
54.请参阅图10、图8、图13所示,所述塑料膜41预制成凹凸点的防滑纹412,所述塑料膜41上间隔设置设定长度的定位标识411,所述传送机构导向槽底部设置塑料膜定位传感器591,在塑料膜传输过程中,所述塑料膜定位传感器591检测到所述定位标识411后,将信号传输给控制器57,控制器57发出停止传送并切断的指令;在另外的实施例中,所述输送轮根据转动的圈数,计算塑料膜41的长度,达到设定长度后由控制器57发出停止传送并切断的指令。
55.请参阅图1至图13所示,覆膜式鞋套机的覆膜方法,包括以下步骤:
56.⑴
第一电机56工作,带动主动输送轮552转动,把塑料膜41送到脚踏区3;
57.⑵
当塑料膜41传送到设定长度时,塑料膜定位传感器591检测到塑料膜41上的定位标识411,第一电机56停止工作;
58.⑶
第二电机55带动偏心轮52,推动切刀模块2上升,塑料膜41被主动压板21顶在被动压板22上不能滑动;
59.⑷
第二电机55继续带动偏心轮52转动,切刀模块2的主动压板21被顶住之后,主动
压板21和被动压板22把塑料膜41压紧,切刀253继续上升,一次性完全切断塑料膜41;
60.⑸
第二电机55继续带动偏心轮52转动,切刀模块2下降到原始位置,被切断的塑料膜41铺在脚踏区3等待使用;
61.⑹
使用者脚踩进来之后,风管11内加热器16开始加热,风机12开始工作,自然风吹过风管11内的加热器16,升温成热风6再吹到脚的四周,塑料膜41受热后收缩,包住鞋底及四周,完成一次穿戴;
62.所述加热器16采用脉冲供电方式供电加热,而不是一直持续供电加热,当机器开始工作时,先通过环境温度传感器13采集环境温度,根据环境温度来确定加热丝的供电的脉冲频率;不管环境温度是高还是低,出风口111 的温度均在设定的温度范围内,当环境温度低时,吹进加热器16内的空气温度低,则需要给加热器16提供更多更密集的电脉冲,以产生足够的热量,保证自然风被及时加热到设定的温度;而当环境温度比较高时,则需要适当的降低加热器16的供电频率,确保出风口111的温度恒温;在出风口111 附近安装热风温度传感器14,用于检测出风口111的温度,热风温度传感器14将检测的温度反馈给控制器57,及时调整加热器16的供电频率,确保出风口111的空气温度保持在设定的温度范围内。
63.以上所述仅为本实用新型的较佳实施例,凡依本实用新型权利要求范围所做的均等变化与修饰,皆应属本实用新型权利要求的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1