一种智能炒菜机的制作方法
1.本实用新型涉及智能厨房领域,具体涉及一种智能炒菜机。
背景技术:
2.随着科技的发展,智能炒菜机常常被应用在各种智能厨房中。滚筒式炒菜机属于智能炒菜机的一种,滚筒式炒菜机设有横置的筒形炒锅,炒锅能沿其轴线旋转,并带动炒锅中的食材随之翻转以实现炒菜。
3.专利文献cn210144444u公开了一种自动炒菜机,这种自动炒菜机装有横置的滚筒式炒锅,炒锅圆周上设有用于进料/出料的锅口。在炒锅的侧壁上固定贴合有加热部,加热部能对炒锅进行加热,从而加热炒锅中的食材。炒菜机炒菜完成后,炒锅需绕其轴线旋转至其锅口朝下,将炒好的食材从锅口中倒出。由于加热部固定装在炒锅上,而现有技术中加热部例如云母片,通常需要配合电连接以实现加热,即加热部连接有电连接线。在需要拆卸炒锅以进行手动清洗锅胆时,使用者还需要使用工具对加热部及其线路一并拆卸,操作麻烦且耗时。
技术实现要素:
4.为解决上述问题,本实用新型提供一种智能炒菜机,该智能炒菜机无需使用工具即可单独拆卸炒锅,拆卸操作简单。
5.本实用新型提供一种智能炒菜机,包括能绕横轴线旋转的炒锅,其锅口开在侧壁,还包括设在炒锅外的能绕自身轴线旋转的机架,机架上设有能对炒锅的侧壁进行加热的加热部,此外,机架和炒锅这两者,其中一者设有凸块,另一者设有导槽,导槽开口处向内收窄直至能卡紧凸块,从而使炒锅安装在机架上。
6.炒锅炒菜后,需拆卸炒锅以进行手动清洗。使用者需移动炒锅以使其相对机架运动,安装在炒锅上和机架上的相配的凸块和导槽亦随之相对滑动,最终使得凸块离开导槽,炒锅就实现与机架的分离。此时使用者可直接对炒锅进行清洗,无需再拆卸加热部及其线路。因此,本实用新型的智能炒菜机无需使用工具即可单独拆卸炒锅,拆卸操作简单。
附图说明
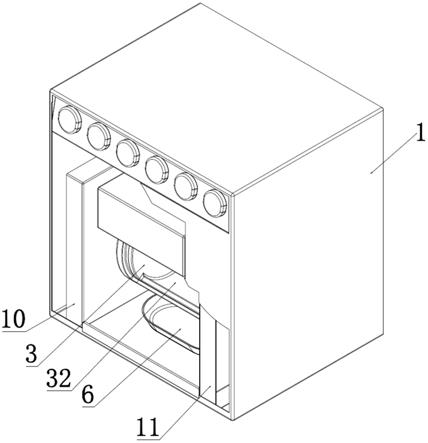
7.图1是智能炒菜机的局部视图。
8.图2是实施例一的智能炒菜机的结构示意图。
9.图3是图2的爆炸图。
10.图4是沿图2中b
‑
b线的剖视图。
11.图5是实施例二的智能炒菜机的结构示意图。
12.图6是图5的爆炸图。
13.图7是沿图5中c
‑
c线的剖视图。
14.图8是实施例二的智能炒菜机炒锅的出菜示意图。
15.图1符号说明:
[0016]1‑
炒菜机外壳;10
‑
前端板;11
‑
后端板;3
‑
炒锅;32
‑
锅口;6
‑
菜盘。
[0017]
图2~图4符号说明:
[0018]
a
‑
横轴线;1
‑
炒菜机外壳;10
‑
前端板;11
‑
后端板;12
‑
安装孔;2
‑
机架;201
‑
端部;202
‑
侧壁;21
‑
导槽;211
‑
开口;22
‑
凸块;3
‑
炒锅;30
‑
端面;31
‑
凸块;32
‑
锅口;4
‑
加热部;5
‑
锅盖;50
‑
连接部;51
‑
凸块;52
‑
通孔;6
‑
菜盘。
[0019]
图5~图8符号说明:
[0020]
a
‑
横轴线;1
‑
炒菜机外壳;10
‑
前端板;11
‑
后端板;12
‑
安装孔;2
‑
机架;201
‑
端部;202
‑
侧壁;22
‑
凸块;221
‑
通孔;23
‑
卡钩;24
‑
留空部;3
‑
炒锅;30
‑
端面;32
‑
锅口;33
‑
横轴体;4
‑
加热部;5
‑
锅盖;53
‑
卡槽;6
‑
菜盘。
具体实施方式
[0021]
智能炒菜机见图1,包括炒菜机外壳1,炒菜机外壳1前后两端对称地设有前端板10和后端板11。在前端板10和后端板11之间安装有横置的圆筒状炒锅3,其中心轴为横轴线,炒锅3的侧壁上开有用于食材进料和出料的锅口32。智能炒菜机装有控制器(图中未示出),控制器具有处理器和预设有炒菜程序的计算机可读存储介质,控制器通过处理器执行该计算机可读存储介质上的炒菜程序从而对炒锅进行控制,具体地,控制器控制炒锅3绕其横轴线旋转,炒锅3旋转直到锅口32朝上以备进料,进料完成后,炒锅3旋转从而翻炒食材,翻炒完成后,炒锅3旋转直至锅口32朝下,炒好的食材就从锅口32掉落到放在炒锅3下方的菜盘6中。
[0022]
智能炒菜机包括由控制器控制的机架、加热部和锅盖,控制器执行炒菜程序从而分别控制炒锅3、机架、加热部和锅盖工作。智能炒菜机不同的安装方式会配套不同的炒菜过程,下述实施例一和实施例二分别说明智能炒菜机各部件的两种安装方式以及对应的炒菜过程。
[0023]
实施一,请见图2~图4。
[0024]
见图2和图3,机架2安装在圆筒状炒锅3外,其具有前、后两个端部201,机架2下侧具有与圆筒炒锅3形状相配的圆弧侧壁202从而把两个端部201的下侧连接起来,机架2上侧留空以供炒锅3放入。机架2的圆弧侧壁202的内侧装有加热部4,加热部4为与圆筒状炒锅3相应的圆弧板状,因而能够贴合炒锅3的外侧壁。机架2的前、后两个端部201的内壁分别开有两个形状相同的导槽21。见图4,导槽21始段从外周径向内伸,导槽21末段为周向的弧状,导槽21从始段向末段逐渐收窄。导槽21的开口211设在其所处端部201内壁的外周缘处。见图2和见图3,炒锅3的前、后端面30各设有一个凸块31,凸块31从导槽21的开口211进入导槽21,并沿导槽21的径向的始段滑动到导槽21的周向的末段进而沿周向的末段滑动直至被收窄的导槽21卡紧,炒锅3就固定安装在机架2上了,故本实施例中,机架2可视为炒锅3的外壳。此时,机架2的自身轴线与炒锅3的横轴线a重合,炒锅3的锅口32朝上以便进料和出料。
[0025]
锅盖5安装在机架2外,锅盖5的内盖面为与炒锅3的圆筒形状相配的圆弧面,该圆弧面贴合炒锅3的外侧壁。在前端板10上和后端板11上各开有对准炒锅3横轴线a的圆形安装孔12,锅盖5在炒锅3前部的前方和炒锅3后部的后方各自设有伸到炒锅3的横轴线a处的连接部50,连接部50在横轴线a处伸出有与圆形安装孔12相配的圆形凸块51,前、后凸块51
分别以可绕横轴线a旋转的方式伸入到前、后安装孔12中,从而使锅盖5以可绕横轴线a旋转的方式安装到前端板10和后端板11上。锅盖5的凸块51连接一个驱动电机(图中未示出),控制器控制该驱动电机驱动凸块51绕横轴线a旋转,则锅盖5绕横轴线a旋转。
[0026]
前、后凸块51各自沿横轴线a开有通孔52,机架2在横轴线a处朝外伸出有与通孔52相配的凸块22,凸块22穿过相应的通孔52则一并穿过相应的安装孔12,从而把机架2连同安装在机架2内的炒锅3和加热部4一起装在外壳的前端板10和后端板11上。机架2的凸块22连接另一个驱动电机(图中未示出),控制器控制机架2的驱动电机驱动凸块22绕横轴线a旋转,则机架2连同加热部4、炒锅3一同绕横轴线a旋转。
[0027]
智能炒菜机的炒菜过程如下:控制器控制机架2绕横轴线a旋转从而带动炒锅3旋转直至锅口32朝上,然后控制锅盖5相对炒锅3旋转直到露出锅口32,食材从炒锅3的上方经锅口32进入到炒锅3内。进料完成后,控制器控制锅盖5旋转直到盖住炒锅3的锅口32,然后控制加热部4对炒锅3进行加热从而加热食材,并且,控制器控制机架2连同安装在机架2上的炒锅3一同绕横轴线a旋转,以此对食材进行翻炒,在炒锅3旋转炒菜的同时,控制器控制锅盖5同步旋转,锅盖5就一直保持盖住炒锅3的锅口32,以使得炒锅3能在翻炒的过程中进行焖煮,令炒出的食材更具风味。在加热翻炒食材的过程中,通过如下急炒步骤实现对食材的快速翻炒:炒锅3先急速旋转,炒锅3内的食材随之被带动翻炒,随后炒锅3急停,炒锅内的食材在惯性作用下继续翻滚,并且,由于食材此前随炒锅一起旋转,在炒锅急停后,食材会继续斜向上移动,使得食材脱离炒锅内壁而短暂的滞空,实现颠锅的效果,翻炒效果更佳。上述急炒步骤中,炒锅3的旋转方向可以是正向或逆向的,要么正向旋转的急炒步骤和逆向旋转的急炒步骤交替执行,可以交替翻炒左右两边的食材,要么连续多次执行旋转方向相同的急炒步骤,可以把底部的食材翻炒上来。急炒步骤中,急速旋转的角度优选为110度~130度,最好是120度;相邻两次急炒步骤的间隔时间t与当前炒制的食材相关,这个时间t预先存储在炒菜程序中。调整急速旋转的角度,并且在两次急炒步骤之间设置一定的间隔时间t,能让食材在回落到炒锅底部之前又被快速翻炒,食材经过多次颠锅式翻炒后更具风味。
[0028]
炒菜完成后,锅盖5无需再与炒锅3同步旋转,控制器仅控制机架2连同炒锅3绕横轴线a顺时针旋转直至炒锅3的锅口32朝下对准菜盘6,锅盖5则不跟随炒锅3旋转,即锅盖5相对炒锅3旋转从而从锅口32移开,如此则朝下的锅口32露出,炒好的食材能够不受阻挡地从锅口32倒出到菜盘6中,完成出菜。
[0029]
实施二,请见图5~图8。
[0030]
实施例二与实施例一不同之处下文详述,未描述之处与实施例一相同。
[0031]
见图5和图6,机架2具有前、后两个端部201,机架2下侧具有与圆筒炒锅3形状相配的圆弧侧壁202从而把两个端部201的下侧连接起来,机架2上侧留空以供炒锅3放入。机架2的圆弧侧壁202的内侧装有加热部4,加热部4为与圆筒状炒锅3相应的圆弧板状,因而能够贴合炒锅3的外侧壁。机架2的前、后两个端部201的中心处各自朝外伸出有圆柱状凸块22,前、后凸块22各自沿轴线开有通孔221。炒锅3具有前、后端面30和可安装在前、后端面30之间的主体,炒锅3的前、后端面30的中心各自朝外伸出横轴体33,前、后横轴体33分别穿过前、后通孔221,炒锅3的前、后端面30就以绕炒锅3的横轴线a旋转的方式安装到机架2上。将炒锅3的本体放入到机架的留空处并与前、后端面30固定安装,则炒锅3就可以绕其横轴线a
旋转的方式安装在机架2上了,此时炒锅3的横轴线a与机架2的轴线重合。炒锅3的后横轴体33连接一个驱动电机(图中未示出),控制器控制该驱动电机驱动横轴体33绕横轴线a旋转,则炒锅3绕横轴线a旋转。
[0032]
锅盖5安装在机架2的上侧,具体地,锅盖5的两端各开有卡槽53,机架2的两个端部201的上侧对应设有与卡槽53相配合的卡钩23,将卡槽53对应卡接到卡钩23中,锅盖5就安装到机架2上了。此时锅盖5与机架2共同围住炒锅3,锅盖5的内盖面为与炒锅3的圆筒形状相配的圆弧面,能够贴合炒锅3圆筒状的外侧壁。机架2侧部的位于加热部4和锅盖5之间的部位留有留空部24,锅盖5相对炒锅3旋转移开使得留空部24对准炒锅3的锅口32从而露出锅口32。见图6和图7,在炒菜机外壳1的前端板10上和后端板11上各开有与机架2的凸块22相配的圆形安装孔12,凸块22穿过相应的安装孔12,机架2连同安装在机架2上的炒锅3、加热部4和锅盖5就安装在前端板10和后端板11上了。机架2的凸块22连接另一个驱动电机(图中未示出),控制器控制机架2的驱动电机驱动凸块22绕横轴线a旋转,则机架2连同安装在机架2上的加热部4、锅盖5一同绕横轴线a旋转。
[0033]
智能炒菜机的炒菜过程如下:控制器控制炒锅3旋转直至锅口32朝上,然后控制机架2相对炒锅3旋转使得锅盖5移开直到机架2的留空部24朝上,则锅口32露出,食材从炒锅3的上方经锅口32进入到炒锅3内。进料完成后,控制器控制机架2连同锅盖5旋转直到锅盖5盖住炒锅3的锅口32,然后控制加热部4对炒锅3进行加热从而加热食材,并且,控制器控制炒锅3绕横轴线a旋转,以此对食材进行翻炒。在炒锅3旋转炒菜的同时,控制器控制机架2连同锅盖5同步旋转,锅盖5就一直保持盖住炒锅3的锅口32,以使得炒锅能在翻炒的过程中进行焖煮,令炒出的食材更具风味。
[0034]
见图8,炒菜完成后,锅盖5无需再与炒锅3同步旋转。控制器控制炒锅3绕横轴线a顺时针旋转直至炒锅3的锅口32朝下对准菜盘6,并控制机架2连同锅盖5一同绕横轴线a相对炒锅3旋转直至机架2的留空部24朝下,锅盖5相对炒锅3旋转从而从锅口32移开,如此则朝下的锅口32露出,炒好的食材能够不受阻挡地从锅口32倒出到菜盘6中,完成出菜。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1