一种自动清理桌面的机器人台灯的制作方法
1.本实用新型涉及机器人台灯技术领域,尤其涉及一种自动清理桌面的机器人台灯。
背景技术:
2.现有的台灯主要用于在工作或学习时进行照明作业,现有的台灯缺少对桌面进行自动清理的功能,每次在书桌上用铅笔和橡皮擦做完作业后,整个桌面都会变得有些脏,有时做一些手工作业时,桌面上还会遗留一些纸屑,每次手动清理的时候,一不小心还会把这些碎屑弄得到处都是,且在清理后,需要单独使用消毒喷壶进行喷洒消毒,虽然市面上有小型的吸尘器可用于对桌面的清理,但是其放置在桌面上占用空间较大,综合来说,市面上缺少一种可照明、可自动清理桌面,又可喷洒消毒的台灯,因此我们提出了一种自动清理桌面的机器人台灯用于解决上述问题。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种自动清理桌面的机器人台灯。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种自动清理桌面的机器人台灯,包括机器人台灯本体,所述机器人台灯本体包括底部为开口设置的灯座、固定在灯座顶部的l形灯杆以及固定在l形灯杆顶部内壁上的照明灯,所述灯座的顶部设有安装槽,安装槽的底部内壁上从左到右依次固定安装有照具开关、蓄电池和ev3控制主机,所述照具开关和照明灯均与蓄电池电性连接,照明开关与照明灯电性连接,灯座的两侧内壁上均固定安装有伺服电机,伺服电机的顶部固定有控制器,两个控制器均与ev3控制主机电性连接,伺服电机的输出轴端部固定安装有第一滚轮,第一滚轮的底部延伸至灯座的下方,灯座的底部后侧转动安装有第二滚轮,第二滚轮和两个第一滚轮呈三角形设置,灯座的前侧内壁和后侧内壁上均固定安装有颜色传感器,两个颜色传感器均位于两个第一滚轮之间,两个颜色传感器均与ev3控制主机电性连接,两个颜色传感器之间设有吸尘机构,所述吸尘机构包括后侧为开口设置的吸尘瓶,吸尘瓶的顶部内壁和底部内壁之间固定安装有驱动电机,驱动电机的输出轴外侧呈环形固定安装有多个扇叶,吸尘瓶的前侧内壁上开设有出气孔,吸尘瓶的后侧螺纹固定有盖板,吸尘瓶的底部连通并固定有两个吸尘管,吸尘管的底端延伸至灯座的下方,吸尘管上固定套设有圆环,圆环的底部粘接固定有多个刷毛,刷毛的底部与第一滚轮的底部平齐,吸尘瓶内固定套设有过滤网,过滤网位于驱动电机的后侧,两个吸尘管均位于过滤网的后侧,灯座内设有酒精喷洒机构,所述酒精喷洒机构包括固定在灯座后侧内壁上的酒精喷瓶以及酒精喷瓶上的按压式喷雾泵头,灯座的前侧内壁上固定安装有往复推杆电机,往复推杆电机的输出轴端部与按压式喷雾泵头的前侧活动接触。
6.优选的,所述吸尘瓶的顶部内壁和底部内壁上均固定安装有固定杆,两个固定杆
相互靠近的一端分别与驱动电机的顶部和底部固定连接。
7.优选的,所述吸尘瓶的后侧顶部和后侧底部均开设有螺纹槽,螺纹槽内螺纹套设有t形快固螺栓,盖板螺纹套设在两个t形快固螺栓上。
8.优选的,所述吸尘瓶的底部内壁上开设有两个圆形孔,圆形孔的内壁与对应的吸尘管的外侧固定连接。
9.优选的,所述灯座和l形灯杆均通过乐高零件拼装而成。
10.优选的,所述灯座的底部开设有前侧和后侧均为开口设置的转动槽,转动槽的两侧内壁之间固定安装有销轴,第二滚轮的一侧开设有穿孔,穿孔内固定套设有轴承,轴承的内圈内侧与销轴的外侧固定连接。
11.与现有的技术相比,本实用新型的有益效果是:
12.通过灯座、l形灯杆、安装槽、照明灯、ev3控制主机、蓄电池、照具开关、伺服电机、第一滚轮、颜色传感器、吸尘瓶、圆环、吸尘管、酒精喷瓶、第二滚轮、驱动电机、过滤网与往复推杆电机相配合,启动两个伺服电机启动并开启驱动电机,两个伺服电机的输出轴带动两个两个第一滚轮转动,使得灯座向前移动,灯座通过销轴带动第二滚轮在桌面上滚动,使得整个机器人台灯本体向前移动,若颜色传感器检测识别到桌面时,机器人台灯本体继续向前移动,反之,颜色传感器将信号传递给ev3控制主机,ev3控制主机通过一个控制器控制对应的一个伺服电机关闭,另一个控制器控制另一个伺服电机反向启动,使得整个机器人台灯本体开始后退转向,降低机器人台灯本体坠落的风险,且机器人台灯本体移动的同时带动吸尘机构上的多个刷毛对桌面进行清扫,驱动电机的输出轴带动多个扇叶转动并并通过两个吸尘管对桌面上的清扫的杂质灰尘进行吸取,吸取的杂质经两个吸尘管进入到吸尘瓶内,过滤网对抽取的杂质进行过滤遮挡,同时抽取的气体经出气孔排出至外界,垃圾抽取完成后,启动往复推杆电机对酒精喷瓶上的按压式喷雾泵头进行按压,使得酒精喷瓶内的酒精经按压式喷雾泵头喷出,对桌面进行消毒,如果需要照明灯照明时,可手动开启照具开关开启照明灯进行照明作业。
13.本实用新型设计合理,机器人台灯本体集清扫、吸尘、消毒和照明一体设置的方式,方便人员使用,节省占用空间,且配合两个颜色传感器的设置,使得整个装置靠近桌面边缘时,自动后退回转,降低机器人台灯本体坠落的风险,满足使用需求。
附图说明
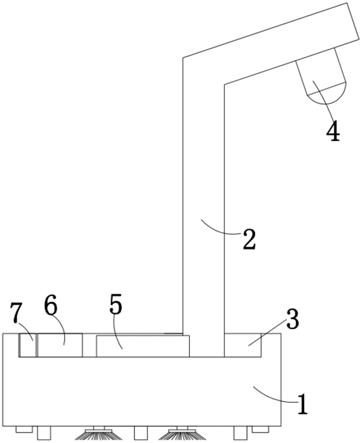
14.图1为本实用新型提出的一种自动清理桌面的机器人台灯的结构示意图;
15.图2为图1的剖视结构示意图;
16.图3为图2中吸尘机构的左视剖视结构示意图;
17.图4为本实用新型提出的一种自动清理桌面的机器人台灯的底座、伺服电机、第一滚轮、第二滚轮和两个颜色传感器连接件仰视结构示意图;
18.图5为图2中酒精喷洒机构的左视结构示意图。
19.图中:1灯座、2 l形灯杆、3安装槽、4照明灯、5 ev3控制主机、6蓄电池、7照具开关、8伺服电机、9第一滚轮、10颜色传感器、11吸尘瓶、12圆环、13吸尘管、14酒精喷瓶、15第二滚轮、16驱动电机、17过滤网、18往复推杆电机。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
21.参照图1
‑
5,一种自动清理桌面的机器人台灯,包括机器人台灯本体,机器人台灯本体包括底部为开口设置的灯座1、固定在灯座1顶部的l形灯杆2以及固定在l形灯杆2顶部内壁上的照明灯4,灯座1的顶部设有安装槽3,安装槽3的底部内壁上从左到右依次固定安装有照具开关7、蓄电池6和ev3控制主机5,照具开关7和照明灯4均与蓄电池6电性连接,照明开关7与照明灯4电性连接,灯座1的两侧内壁上均固定安装有伺服电机8,伺服电机8的顶部固定有控制器,两个控制器均与ev3控制主机5电性连接,伺服电机8的输出轴端部固定安装有第一滚轮9,第一滚轮9的底部延伸至灯座1的下方,灯座1的底部后侧转动安装有第二滚轮15,第二滚轮15和两个第一滚轮9呈三角形设置,灯座1的前侧内壁和后侧内壁上均固定安装有颜色传感器10,两个颜色传感器10均位于两个第一滚轮9之间,两个颜色传感器10均与ev3控制主机5电性连接,两个颜色传感器10之间设有吸尘机构,吸尘机构包括后侧为开口设置的吸尘瓶11,吸尘瓶11的顶部内壁和底部内壁之间固定安装有驱动电机16,驱动电机16的输出轴外侧呈环形固定安装有多个扇叶,吸尘瓶11的前侧内壁上开设有出气孔,吸尘瓶11的后侧螺纹固定有盖板,吸尘瓶11的底部连通并固定有两个吸尘管13,吸尘管13的底端延伸至灯座1的下方,吸尘管13上固定套设有圆环12,圆环12的底部粘接固定有多个刷毛,刷毛的底部与第一滚轮9的底部平齐,吸尘瓶11内固定套设有过滤网17,过滤网17位于驱动电机16的后侧,两个吸尘管13均位于过滤网17的后侧,灯座1内设有酒精喷洒机构,酒精喷洒机构包括固定在灯座1后侧内壁上的酒精喷瓶14以及酒精喷瓶14上的按压式喷雾泵头,灯座1的前侧内壁上固定安装有往复推杆电机18,往复推杆电机18的输出轴端部与按压式喷雾泵头的前侧活动接触,本实用新型设计合理,机器人台灯本体集清扫、吸尘、消毒和照明一体设置的方式,方便人员使用,节省占用空间,且配合两个颜色传感器10的设置,使得整个装置靠近桌面边缘时,自动后退回转,降低机器人台灯本体坠落的风险,满足使用需求。
22.本实用新型中,吸尘瓶11的顶部内壁和底部内壁上均固定安装有固定杆,两个固定杆相互靠近的一端分别与驱动电机16的顶部和底部固定连接,吸尘瓶11的后侧顶部和后侧底部均开设有螺纹槽,螺纹槽内螺纹套设有t形快固螺栓,盖板螺纹套设在两个t形快固螺栓上,吸尘瓶11的底部内壁上开设有两个圆形孔,圆形孔的内壁与对应的吸尘管13的外侧固定连接,灯座1和l形灯杆2均通过乐高零件拼装而成,灯座1的底部开设有前侧和后侧均为开口设置的转动槽,转动槽的两侧内壁之间固定安装有销轴,第二滚轮15的一侧开设有穿孔,穿孔内固定套设有轴承,轴承的内圈内侧与销轴的外侧固定连接,本实用新型设计合理,机器人台灯本体集清扫、吸尘、消毒和照明一体设置的方式,方便人员使用,节省占用空间,且配合两个颜色传感器10的设置,使得整个装置靠近桌面边缘时,自动后退回转,降低机器人台灯本体坠落的风险,满足使用需求。
23.工作原理:使用时,ev3控制主机5通过两个控制器操控两个伺服电机8启动,同时开启驱动电机16,伺服电机8的输出轴带动对应的第一滚轮9转动,两个第一滚轮9转动并同时带动灯座1向前移动,灯座1通过销轴带动第二滚轮15在桌面上滚动,灯座1带动吸尘机构
和酒精喷洒机构向前移动,使得整个机器人台灯本体向前移动,同时两个颜色传感器10对桌面进行检测识别,若颜色传感器10检测识别到桌面时,机器人台灯本体继续向前移动,反之,若没有检测识别到桌面,则说明机器人台灯本体已经靠近桌面边缘,颜色传感器10将信号传递给ev3控制主机5,ev3控制主机5通过一个控制器控制对应的一个伺服电机8关闭,并通过另一个控制器控制另一个伺服电机8反向启动,使得整个机器人台灯本体开始后退转向,从而达到在靠近桌面边缘时,自动后退回转的目的,降低机器人台灯本体坠落的风险;
24.且机器人台灯本体移动的同时带动吸尘机构上的多个刷毛与桌面发生摩擦,并对桌面进行清扫,同时驱动电机16的输出轴带动多个扇叶转动,多个扇叶转动的同时产生抽吸力,并通过两个吸尘管13对桌面上的清扫的杂质灰尘进行吸取,吸取的杂质经两个吸尘管13进入到吸尘瓶11内,过滤网17对抽取的杂质进行过滤遮挡,同时抽取的气体经出气孔排出至外界;
25.垃圾抽取完成后,启动往复推杆电机18,往复推杆18的输出轴前后移动并往复对酒精喷瓶14上的按压式喷雾泵头进行按压,使得酒精喷瓶14内的酒精经按压式喷雾泵头喷出,对桌面进行消毒,如果需要照明灯4照明时,可手动开启照具开关7,使得照明灯4开启进行照明作业,机器人台灯本体集清扫、吸尘、消毒和照明一体设置的方式,方便人员使用,节省占用空间。
26.本实用的描述中,还需要说明的是,除非另有明确的规定和限制,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接连接,也可以是通过中间媒介相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用中的具体含义。
27.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1