集尘盒及扫地机器人的制作方法
1.本实用新型涉及智能电器技术领域,特别是涉及一种集尘盒及扫地机器人。
背景技术:
2.随着经济的发展与社会的进步,人们对生活质量的要求越来越高,因此一些能够解放人工的智能电器应运而生。其中,扫地机器人作为智能家用电器的一种,在人们的日常生活中发挥越来越重要的作用。
3.扫地机器人包括壳体及集尘盒,集尘盒装配于壳体内用于集尘。扫地机器人还包括装配于壳体上的滚刷组件、供电件及风道组件等,风道组件包括风道及风机。在扫地机器人吸尘时,风机工作,携带灰尘的气流从滚刷组件进入集尘盒内,在集尘盒内的过滤件的过滤作用下灰尘滞留于集尘盒内,干净气流经风道流向外界。
4.传统的扫地机器人,整个扫地机器人空间利用率低,从而导致扫地机器人的体积较大。
技术实现要素:
5.基于此,有必要针对传统扫地机器人空间利用率低的问题,提供一种能够提高扫地机器人空间利用率的集尘盒及扫地机器人。
6.一种集尘盒,所述集尘盒包括:
7.本体,具有集尘腔,所述本体具有纵长延伸的纵长方向和相对所述纵长方向的周向方向;
8.所述本体在所述周向方向上的第一侧面设有与所述集尘腔连通的出风口和与所述出风口相互独立的第一安装区域;
9.所述第一侧面沿所述纵长方向的尺寸为第一长度,所述出风口沿所述纵长方向的尺寸为第二长度,所述第二长度与所述第一长度之比为2/5
‑
2/3;
10.在所述纵长方向上,所述第一安装区域位于所述出风口的至少一侧。
11.在其中一个实施例中,定义垂直于所述第一侧面的方向为第一方向,与所述第一方向及所述纵长方向均垂直的方向为第二方向;
12.所述第一侧面具有沿所述第二方向延伸的第一中线,所述出风口位于所述第一中线的一侧,所述第一安装区域位于所述第一中线的另一侧。
13.在其中一个实施例中,定义垂直于所述第一侧面的方向为第一方向,与所述第一方向及所述纵长方向均垂直的方向为第二方向;
14.所述第一侧面具有沿所述纵长方向延伸的第二中线,所述出风口位于所述第二中线的上方;
15.其中,所述第一侧面具有用于安装第二供电件的第二安装区域,在所述第二方向上,所述第二安装区域位于所述第二中线的下方。
16.在其中一个实施例中,所述集尘盒还包括过滤件,所述过滤件设于所述本体内且
位于气流从所述集尘腔流向所述出风口的流动路径上;
17.其中,所述本体具有底面,所述过滤件的一端距离所述底面的高度与所述过滤件另一端距离所述底面的高度不等。
18.在其中一个实施例中,所述本体包括盒体及装配件,所述过滤件装配于所述装配件上并与所述装配件形成过滤组件,所述过滤组件装配于所述盒体的顶端;所述出风口设于所述装配件上。
19.在其中一个实施例中,定义垂直于所述第一侧面的方向为第一方向,与所述第一方向及所述纵长方向均垂直的方向为第二方向;所述第一侧面具有沿所述第二方向延伸的第一侧边与第二侧边;
20.所述出风口具有沿所述第二方向延伸的第三侧边与第四侧边,所述第三侧边相对于所述第四侧边靠近所述第一侧边设置;
21.其中,所述第一侧边与所述第三侧边在所述纵长方向上的间距为第一间距,所述第四侧边与所述第二侧边在所述纵长方向上的间距为第二间距,所述第一间距与所述第二间距中长度较短的一者的长度为20mm
‑
40mm。
22.一种扫地机器人,包括如上述任一项所述的集尘盒;及
23.风道组件,设于所述集尘盒的本体具有出风口的一侧,所述风道组件包括风道和动力件,所述动力件通过所述风道与所述集尘盒连接且所述风道与所述出风口连通,所述动力件用于提供气流从所述集尘盒流向所述风道的动力;
24.所述扫地机器人还包括与所述风道组件设于所述本体的同一侧的第一供电件;
25.其中,在所述纵长方向上,所述第一供电件设于所述集尘盒的所述第一安装区域。
26.在其中一个实施例中,定义垂直于所述第一侧面的方向为第一方向,与所述第一方向及所述纵长方向均垂直的方向为第二方向;平行于所述第一方向的第一虚拟直线和平行于所述第二方向的第二虚拟直线所在平面为第一虚拟平面;
27.所述第一供电件朝向所述第一虚拟平面的正投影,与所述风道组件朝向所述第一虚拟平面的正投影至少部分重叠。
28.在其中一个实施例中,在所述本体的纵长方向上,所述第一供电件位于所述风道组件的其中一侧;
29.或者,在所述本体的纵长方向上,所述第一供电件位于所述风道组件的两侧。
30.在其中一个实施例中,所述第一供电件及所述风道组件在所述集尘盒的本体所在平面的正投影位于所述平面内。
31.上述集尘盒及扫地机器人,在本体的纵长方向上,出风口占据本体的长度较小,如此在本体设有出风口的第一侧面可以预留第一安装区域以便于装配供电件,即将供电件与出风口连通的风道组件设于本体的同一侧。也即为当将扫地机器人放置于地面上时,供电件位于风道组件的左侧和/或右侧,这样避免了将供电件与风道组件前后排布,提高了扫地机器人的空间利用率,从而减少了扫地机器人的体积。
附图说明
32.图1为本实用新型一实施例提供的扫地机器人的剖视图;
33.图2为图1中所示的扫地机器人的局部结构图;
34.图3为图1中所示的扫地机器人的集尘盒的剖视图;
35.图4为图3中所示的集尘盒的爆炸图;
36.图5为图3中所示的集尘盒的一视角的轴测图;
37.图6为图3中所示的集尘盒的另一视角的轴测图;
38.图7为图3中所示的集尘盒的平面图;
39.图8为图3中所示的集尘盒的平面图;
40.图9为本实用新型另一实施例提供的扫地机器人的局部结构图;
41.图10为图3中所示的集尘盒的局部装配部;
42.图11为图3中所示的集尘盒的局部结构图;
43.图12为图10中所示的集尘盒的另一视角的结构图;
44.图13为图3中所示的集尘盒的过滤组件的结构图;
45.图14为图3中所示的集尘盒的又一视角的轴测图;
46.图15为图3中所示的集尘盒的又一视角的轴测图;
47.图16为图3中所示的集尘盒的又一视角的轴测图;
48.图17为图1中所示的扫地机器人的a处放大图;
49.图18为图3中所示的集尘盒的侧视图;
50.图19为图18中所示的扫地机器人在未装配集尘盒时的结构图;
51.图20为图19中所示的扫地机器人的b处放大图。
52.100、扫地机器人;10、主体;11、壳体;111、第二限位部;112、第二导向配合面;113、第二转动配合部;12、风道组件;121、风道;122、动力件;13、第一供电件;14、第二供电件;20、集尘盒;21、集尘腔;22、进风口;23、出风口;24、本体;241、盒体;2411、容置部;2412、容置腔;2413、第一缺口;2414、第二缺口;242、过滤组件;2421、过滤件;2422、装配件;24221、第一板;24222、第二板;24223、第三板;24224、凹陷部;2423、装配腔;243、轨道;244、滑块;245、密封件;2461、第一子卡接部;2462、第二子卡接部;2471、第三子卡接部;2472、第四子卡接部;248、第一防脱部;249、第二防脱部;25、触发件;26、装配部;27、提手;271、第一限位部;272、第一导向配合面;273、第一转动配合部;l1、第一长度;l2、第二长度;l3、第一间距;l4、第二间距;a、第一侧边;b、第二侧边;c、第三侧边;d、第四侧边;x1、第一中线;x2、第二中线。
具体实施方式
53.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
54.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装
置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
55.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
56.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
57.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
58.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
59.正如背景技术中所述,扫地机器人包括滚刷组件、供电件及风道组件,风道组件包括风道及风机。具体地,集尘盒上设有进风口及出风口,滚刷组件及风道组件设于集尘盒的前后两侧,滚刷组件与进风口连通,风道组件的风道与出风口连通,风道组件的风机与风道未与集尘盒连接的一端连接,供电件用于扫地机器人各部件的供电。传统的扫地机器人空间利用率较低,从而导致整个扫地机器人的体积较大。
60.本技术的发明人研究发现,出现上述问题的根本原因在于:传统集尘盒的出风口的长度接近整个集尘盒沿其纵长方向上的长度,如此导致与出风口连通的风道组件的占位与供电件的占位相冲突,进而导致供电件只能设于滚刷组件的前端,也即为在扫地机器人的吸尘路径上,供电件与风道组件只能位于集尘盒的前后两端。
61.参阅图1,本实用新型一实施例提供一种扫地机器人100,包括主体10及集尘盒20,集尘盒20设于主体10上,用于收集灰尘。当集尘盒20内的灰尘达到一定容量后,用户可以将集尘盒20从主体10上取下倒尘;当倒尘完毕后,再将集尘盒20装配于主体10上,以便于再次集尘。
62.请一并参阅图2,主体10包括壳体11及装配于壳体11上的滚刷组件(图中未示出)及风道组件12,风道组件12包括风道121及动力件122,滚刷组件与风道组件12分别装配于集尘盒20相对的两侧。参照图2中方向所示,风道组件12位于图2中集尘盒20的左下侧,则滚刷组件位于图2中集尘盒20的右上侧。
63.具体地,集尘盒20内设有集尘腔21(参阅图3),且集尘盒20上设有均与集尘腔21连
通的进风口22及出风口23(参阅图4),滚刷组件与进风口22连通,风道组件12与出风口23连通。更具体地,动力件122通过风道121与集尘盒20连接且风道121与出风口23连通,动力件122用于提供气流从滚刷组件流向集尘盒20,并从集尘盒20流向风道121的动力。
64.在扫地机器人100工作时,动力件122启动,外界携带灰尘的气流从滚刷组件进入集尘盒20内,灰尘滞留于集尘盒20内,洁净气体从集尘盒20流向风道121,并经过动力件122后排向外界。具体地,滚刷组件包括辊体、刷体及滚刷驱动件,辊体与滚刷驱动件连接,刷体设于辊体表面。动力件122为风机,风机包括蜗壳、电机及风叶,蜗壳与风道121连通,电机及风叶均设于蜗壳内。滚刷驱动件带动辊体绕自身轴线旋转,进而带动辊体表面的刷体旋转,通过旋转的刷体与地面接触来带起地面上的灰尘等垃圾。同时电机驱动风叶在蜗壳内转动,从而产生流动的气流,流动的气流携带滚刷组件带起的灰尘进入集尘盒20,灰尘滞留于集尘盒20内,清洁气流从集尘盒20进入风道121内,最终从风道121进入蜗壳排出。
65.参阅图2,扫地机器人100还包括第一供电件13,第一供电件13装配于壳体11上,上述滚刷组件及风道组件12均与第一供电件13电连接,第一供电件13用于向滚刷组件及风道组件12提供其所需要的电力。
66.参阅图5,本技术的实施例中,集尘盒20包括本体24,上述集尘腔21设于本体24内,进风口22及出风口23均设于本体24上。本体24具有相对纵长方向的周向方向,本体24在周向方向上的第一侧面设有上述出风口23及与出风口23相互独立的第一安装区域。参阅图6,本体24的纵长方向x(集尘盒20的纵长方向x也即为本体24的纵长方向x)即为图6中的左上到右下的方向,或者右下到左上的方向。
67.也即为,当将本体24放置于水平面上时,本体24具有相对设置的顶面及底面,顶面与底面的连线方向为第二方向z,第一方向y与纵长方向x及第二方向z均垂直,上述出风口23在第一方向上设于第一侧面。
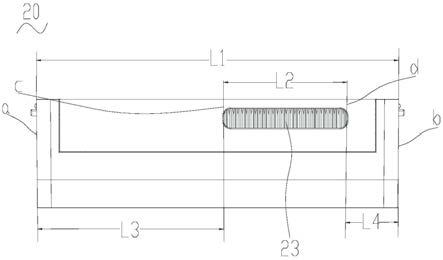
68.本体24在纵长方向x上的长度为第一长度l1,出风口23在本体24的纵长方向x上的长度为第二长度l2(参阅图6及图7),第二长度l2与第一长度l1的比为2/5
‑
2/3。在纵长方向x上,第一安装区域位于出风口23的至少一侧,第一供电件13安装于第一安装区域。
69.通过上述设置,在本体24的纵长方向x上,出风口23占据本体24的长度较小,如此在本体24设有出风口23的第一侧面可以预留第一安装区域以便于装配第一供电件13,即将第一供电件13与风道组件12设于本体24在第一方向y上的同一侧,也即为当将扫地机器人100放置于地面上时,在本体24的纵长方向x上,第一供电件13位于风道组件12的左侧和/或右侧(参阅图2中方向所示),这样避免了将供电件与风道组件12前后排布(在第一方向y上,供电件与风道组件12位于集尘盒20相对的两侧),提高了扫地机器人100的空间利用率,从而减少了扫地机器人100的体积。
70.在一个实施例中,定义平行于第一方向y的第一虚拟直线和平行于第二方向z的第二虚拟直线所在平面为第一虚拟平面。第一供电件13朝向第一虚拟平面的正投影,与风道组件12朝向第一虚拟平面的正投影至少部分重叠。也即为,在本体24的纵长方向x上,第一供电件13与风道组件12至少部分相对设置,如此可以减少第一供电件13所占据的体积,提高扫地机器人100的空间利用率。
71.具体地,第一供电件13朝向第一虚拟平面的正投影位于风道组件12朝向第一虚拟平面的正投影的范围内,也即为第一供电件13与风道121完全正对。更具体地,第一供电件
13朝向第一虚拟平面的正投影位于风道121朝向第一虚拟平面的正投影的范围内。应当理解的是,在另一些实施例中,第一供电件13朝向第一虚拟平面的正投影位于风道121及动力件122朝向第一虚拟平面的正投影的范围内,在此亦不作限定。
72.参阅图8,在一个实施例中,第一侧面具有沿第二方向z延伸的第一中线x1,出风口23位于第一中线x1的一侧,第一安装区域位于第一中线x1的另一侧。此时,出风口23位于第一侧面的左侧或右侧,则在本体24的纵长方向x上,第一供电件13能够设置于风道组件12的其中一侧。继续参阅图7,具体地,第一侧面具有沿第二方向z延伸的第一侧边a与第二侧边b,出风口23具有沿第二方向z延伸的第三侧边c与第四侧边d,第三侧边c相对于第四侧边d靠近第一侧边a设置。其中,第一侧边a与第三侧边c在纵长方向x上的间距为第一间距l3,第四侧边d与第二侧边b在纵长方向x上的间距为第二间距l4,第一间距l3与第二间距l4中长度较短的一者的长度为20mm
‑
40mm。
73.应当理解的是,在另一个实施例中,第一中线x1也可以穿过出风口23设置,此时,出风口23位于第一侧面的中间位置,第一安装区域位于出风口23的两侧,则在本体24的纵长方向x上,第一供电件13位于风道组件12的两侧。
74.继续参阅图8,进一步,第一侧面具有沿纵长方向x延伸的第二中线x2,出风口23位于第二中线x2的上方,本体24设有出风口23的侧面具有第二安装区域,在第二方向z上,第二安装区域位于第二中线x2的下方,参阅图9,此时设置扫地机器人100包括第二供电件14,第二供电件14设于风道121上述第二安装区域,以增加整个供电件的容量,便于扫地机器人100的供电。
75.第一供电件13及风道组件12在集尘盒20的本体24所在平面的正投影位于该平面内,如此可以防止第一供电件13及风道组件12的体积过大,提高扫地机器人100的空间利用率。
76.在一个实施例中,第一供电件13与第二供电件14一体设置。应当理解的是,在另一些实施例中,第一供电件13也可以与第二供电件14分体设置,在此不作限定。具体地,第一供电件13与第二供电件14均为长方体状结构,且均为可充电电池。
77.参阅图10,在一个实施例中,本体24包括盒体241及过滤组件242,进风口22及集尘腔21均设于盒体241上,过滤组件242可拆卸地装配于盒体241上,过滤组件242的过滤件2421位于气流从集尘腔21流向外界的流动路径上。盒体241与过滤组件242中一者上设有一端具有开口的轨道243,另一者上设有滑块244,滑块244能够从轨道243具有开口的一端滑向轨道243内或从轨道243内滑出,过滤组件242通过滑块244与轨道243配合装配。如此,当需要将过滤组件242装配于盒体241上时,滑块244顺着轨道243滑动将过滤组件242装配于盒体241上,当需要将过滤组件242从盒体241上拆下时,滑块244顺着轨道243反向滑动将过滤组件242从盒体241上拆下,便于过滤组件242的拆装。
78.具体地,轨道243设于盒体241上,滑块244设于过滤组件242上,当需要将过滤组件242装配于盒体241上时,设于过滤组件242上的滑块244从轨道243具有开口的一端滑向轨道243内,以将过滤组件242装配于盒体241上,当需要将过滤组件242从盒体241上拆下时,设于过滤组件242上的滑块244从轨道243具有开口的一端滑出轨道243,以将过滤组件242从盒体241上拆下。当然,在另一个实施例中,轨道243也可以设于过滤组件242上,相应地,滑块244设于盒体241上,在此不作限定。
79.参阅图11及图12,过滤组件242还包括装配件2422,过滤件2421装配于装配件2422上,滑块244设于装配件2422上。
80.具体地,过滤件2421与装配件2422装配为一体,则当需要将过滤件2421装配于盒体241上时,可以将装配为一体的过滤件2421及装配件2422共同装配于盒体241上,避免先装配过滤件2421再装配装配件2422,当需要将过滤件2421从盒体241上拆卸时,只需要将装配为一体的过滤件2421及装配件2422一同从盒体241上拆下,避免了先拆卸装配件2422再拆卸过滤件2421,便于过滤件2421的拆装。具体地,过滤组件242还包括胶粘件,过滤件2421通过胶粘件与装配件2422粘结为一体。当然,在另一些实施例中,过滤件2421还可以通过其他方式与装配件2422装配为一体,在此亦不作限定。
81.装配件2422内设有集尘腔21连通的装配腔2423(参阅图13),过滤件2421装配于装配腔2423内,上述出风口23设于装配件2422上且与装配腔2423连通。在一个具体实施例中,在第一方向y上,出风口23设于装配件2422的一侧面上,装配件2422在本体24的纵长方向x上的长度为第一长度l1,出风口23在本体24的纵长方向x上的长度为第二长度l2,第二长度l2为第一长度l1的2/5
‑
2/3倍。
82.在一个具体实施例中,过滤件2421所在的平面相对于重力方向倾斜设置。也即为,过滤件2421的一端与本体24的底面之间的距离与过滤件2421的另一端与底面之间的距离不等。如此,相对于过滤件2421所在的平面与重力方向相平行的情况,便于粘贴于过滤件2421上的灰尘在重力的作用下滑落入集尘腔21内。
83.继续参阅图13,本体24还包括密封件245,密封件245设于装配件2422与盒体241之间,以密封装配件2422与盒体241,防止风从装配件2422与盒体241之间向外界逸散。具体地,密封件245为密封棉。在另一些实施例中,密封件245也可以为密封圈等密封结构,在此亦不作限定。
84.在一个实施例中,盒体241相对的两侧设有轨道243,装配件2422相对的两侧设有滑块244,装配件2422两侧的滑块244分别与两侧的轨道243相配合,以便于过滤组件242的拆装。
85.继续参阅图10,过滤组件242装配于盒体241的顶部,具体地,盒体241的顶部设有容置部2411,容置部2411具有容置腔2412,容置部2411的侧面设有与容置腔2412连通的第一缺口2413,过滤组件242从第一缺口2413插设于容置部2411上并至少部分容置于容置腔2412内。
86.上述轨道243设于容置部2411上,滑块244设于装配件2422上,过滤组件242通过滑块244与轨道243配合装配。容置腔2412的内壁上设有第一卡接部,装配件2422上设有第二卡接部,过滤组件242装配于容置腔2412内,第一卡接部与第二卡接部卡接限制装配件2422相对于容置部2411在装配方向上运动。也即为,当滑块244在滑轨内滑动到位后,第一卡接部与第二卡接部卡接固定以使过滤组件242牢固固定于盒体241上。
87.第一卡接部的部分设于容置腔2412与第一缺口2413相对的内壁上,第一卡接部的剩余部分位于容置腔2412设有轨道243或滑块244的内壁上,第二卡接部与第一卡接部设置的位置相对应。也即为,第一卡接部的部分位于滑块244与滑轨相配合的滑动路径上,第一卡接部的剩余部分与轨道243或滑块244位于同一侧,第二卡接部与第一卡接部设置的位置相对应。
88.具体地,第一卡接部包括第一子卡接部2461与第二子卡接部2462,第一子卡接部2461设于容置腔2412与第一缺口2413相对的内壁上,第二子卡接部2462设于容置腔2412设有轨道243的内壁上。第二卡接部包括第三子卡接部2471(参阅图12)与第四子卡接部2472,第三子卡接部2471设于装配件2422滑入容置腔2412的端部,第四子卡接部2472设于装配件2422设有滑块244的一侧。当滑块244在轨道243内滑动到位后,每个第三子卡接部2471与每个第一子卡接部2461卡接,每个第四子卡接部2472与每个第二子卡接部2462卡接,以保证过滤组件242装配于盒体241上的稳定性。
89.在一个实施例中,容置腔2412的顶部设有第二缺口2414,集尘盒20的顶面形成于装配件2422上。容置腔2412内设有第一防脱部248,装配件2422上设有第二防脱部249,第二防脱部249与第一防脱部248限位配合以限制装配件2422从第二缺口2414脱出容置腔2412。通过设置第一防脱部248与第二防脱部249限位配合,以防止过滤组件242在装配于盒体241上后,过滤组件242在受到向上的作用力时,过滤组件242从第二缺口2414脱出容置腔2412。
90.第一防脱部248与第二防脱部249中一者为限位槽,在装配件2422与容置部2411的装配方向上的一端,限位槽具有开口,第一防脱部248与第二防脱部249中另一者为插接部。其中,限位槽从具有开口的一端到远离开口的一端宽度逐渐减小,插接部从开口插接于限位槽内,并从限位槽具有开口的一端到远离开口与限位槽逐渐配合紧密。
91.通过上述设置,当滑块244滑入轨道243的过程中,插接部从限位槽宽度较大的一端逐渐插入其宽度较小的一端,如此可以保证插接部与限位槽配合越来越紧密,进一步避免过滤组件242从第二缺口2414脱出容置腔2412。
92.在一个具体实施例中,装配件2422包括第一板24221、第二板24222及第三板24223(参阅图12及图13),第一板24221与第二板24222连接且相垂直,第三板24223的两端分别与第一板24221与第二板24222连接,且第一板24221、第二板24222及第三板24223界定形成与集尘腔21连通的装配腔2423。其中,集尘盒20的顶面形成于第一板24221上,第三子卡接部2471与第一板24221连接,第二板24222形成集尘盒20的部分侧面,第四子卡接部2472与第二板24222连接,第一板24221或第二板24222上设有与装配腔2423连通的出风口23,第三板24223位于容置腔2412内,过滤件2421设于装配腔2423内且过滤件2421所在的平面与第三板24223所在的平面平行。应当理解的是,在另一些实施例中,装配件2422的设置方式不限于此,在此亦不作限定。
93.具体地,第三板24223为格栅状,在起到支撑过滤件2421的同时,便于气流从集尘腔21进入装配腔2423内。
94.参阅图14,在一个实施例中,装配件2422的外表面还设有便于手握的凹陷部24224,如此,当需要拆装过滤组件242时,只需要手握凹陷部24224操作过滤组件242即可。
95.在一个实施例中,集尘盒20还包括触发件25(参阅图3及图11),装配件2422的外表面或盒体241上具有装配部26,触发件25装配于装配部26上,扫地机器人100的主体10上设有被触发件,被触发件通过触发件25以判断是否装配集尘盒20,从而确定扫地机器人100是否具备正常工作的条件。当被触发件未感应到触发件25时,则扫地机器人100判断没有装配集尘盒20,此时扫地机器人100不具备正常工作的条件;若被触发件感应到触发件25时,则扫地机器人100判断装配有集尘盒20,此时扫地机器人100具备正常工作的条件。
96.上述通过在装配件2422的外表面或盒体241上设置装配部26,触发件25装配于装
配部26,由于过滤件2421装配于装配件2422的装配腔2423内,即过滤件2421位于装配件2422内,当需要更换触发件25时,则不再需要将过滤件2421取下(由于过滤件2421一般通过胶粘贴于装配件2422上,若将过滤件2421取下,则会导致过滤件2421损坏甚至不可用),触发件25更换便利。
97.在此需要说明的是,上述装配件2422的外表面指代的是:在过滤组件242还未装配于盒体241上时的外表面,当装配件2422装配于盒体241上时,势必有部分外表面被盒体241遮挡。
98.具体地,触发件25为磁铁。当被触发件未感应到磁铁时,则扫地机器人100判断没有装配集尘盒20,此时扫地机器人100不具备正常工作的条件;若被触发件感应到磁铁时,则扫地机器人100判断装配有集尘盒20,此时扫地机器人100具备正常工作的条件。
99.一个具体实施例中,当过滤组件242装配于盒体241上时,装配部26隐藏于外界,装配于装配部26上的触发件25隐藏于外界。应当理解的是,在另一个实施例中,当过滤组件242未装配于盒体241上时,装配部26显露于外界,此时触发件25也显露于外界。
100.具体地,装配部26为设于装配件2422的外表面或盒体241上的装配槽,触发件25收容于装配槽内。当然,在另一些实施例中,装配部26还可以为设于装配件2422的外表面或盒体241上装配孔,在此亦不作限定。
101.在一个具体实施例中,装配部26设于装配件2422或盒体241具有轨道243或滑块244的一侧,当过滤组件242通过滑块244与轨道243配合装配于盒体241上时,装配部26及触发件25均隐藏于外界。继续参阅图12,装配件2422还包括连接部,第二防脱部249通过连接部与装配件2422的第二板24222连接,装配槽设于连接部上。应当理解的是,在另一些实施例中,装配槽的设位置不受限定。
102.参阅图15及图16,在一个实施例中,集尘盒20还包括提手27,提手27与盒体241枢转连接,且能够相对于盒体241在竖直设置的提拉位置与水平设置的限位位置之间切换。提手27背离盒体241的表面设有第一限位部271,扫地机器人100的壳体11上设有第二限位部111,在提手27处于限位位置时,第一限位部271能够与第二限位部111限位配合以限制集尘盒20的位置,从而保证集尘盒20装配到位(参阅图17)。
103.通过在提手27背离盒体241的表面设有第一限位部271,则减少了提手27上设置的限位机构所占据的体积,从而可以相应地增大扫地机器人100其他结构所占用的体积,减少了空间的不必要浪费。
104.进一步,第一限位部271为凸设于提手27的表面的凸点,第二限位部111为与凸点相配合的凹槽。当然,在另一些实施例中,也可以设置第一限位部271为凹陷设于提手27表面的凹槽,第二限位部111为与第一限位部271相配合的凸点,在此不作限定。
105.当将第一限位部271与第二限位部111设置为凸点与凹槽相配合的结构时,手提提手27将集尘盒20装配于扫地机器人100的主体10上,而后操作提手27从提拉位置切换至限位位置,凸点与凹槽相配合以将集尘盒20限位于扫地机器人100的主体10上。
106.进一步,提手27的两端均设有第一限位部271,且位于提手27两端的第一限位部271相对于提手27的中线(为了与上述第一中线x1与第二中线x2区分开,定义提手27的中线为第三中线)对称设置,从而保证了限位的稳定性。
107.参阅图18
‑
20,提手27的端部形成圆弧状的第一导向配合面272,扫地机器人100的
壳体11上形成第二导向配合面112,提手27在提拉位置与限位位置切换的过程中,第一导向配合面272与扫地机器人100的主体10上的第二导向配合面112导向配合,便于提手27在提拉位置与限位位置之间切换。
108.进一步,提手27上还设有第一转动配合部273,扫地机器人100的壳体11上设有第二转动配合部113,在提手27在提拉位置与限位位置切换的过程中,第一转动配合部273与第二转动配合部113转动配合。且在提手27处于限位位置时,第一转动配合部273与第二转动配合部113限位配合以限制提手27从提拉位置朝向限位位置的方向继续转动。
109.通过上述设置,第一转动配合部273与第二转动配合,便于提手27在提拉位置与限位位置之间切换。在提手27处于限位位置时,第一转动配合部273与第二转动配合部113限位配合以限制提手27从提拉位置朝向限位位置的方向继续转动,同时第一限位部271与第二限位部111限位配合,双重作用限位提手27,保证了集尘盒20限位的稳定性。
110.具体地,第一转动配合部273沿垂直于提手27的延伸方向延伸设于提手27上,且第一转动配合部273为具有开口的圆弧型槽或半圆块状。
111.在此需要说明的是,上述半圆块状并非只是圆块的一半,在本实施例中,只要是截面形状包括相互连接的一圆弧及一直线的形状均划分为半圆块状。
112.在一个具体实施例中,设置第一转动配合部273为半圆块状,第二转动配合部113为具有开口的圆弧型槽。当然,在另一实施例中,还可以设置第一转动配合部273为具有开口的圆弧型槽,第二转动配合部113为半圆块状,在此亦不作限定。
113.本实用新型另一实施例还提供一种上述扫地机器人100所包括的集尘盒20,集尘盒20包括本体24,本体24内设有集尘腔21,本体24具有纵长延伸的纵长方向x及相对于纵长方向x的周向方向。本体24在周向方向上的第一侧面设有与集尘腔21连通的出风口23和与出风口23相对独立的第一安装区域。第一侧面沿纵长方向x的尺寸为第一长度l1,出风口23沿纵长方向x的尺寸为第二长度l2,第二长度l2与第一长度l1之比为2/5
‑
2/3;在纵长方向x上,第一安装区域位于出风口23的至少一侧。
114.通过上述设置,在本体24的纵长方向x上,出风口23占据本体24的长度较小,如此在本体24设有出风口23的第一侧面可以预留第一安装区域以便于装配第一供电件13,即将第一供电件13与风道组件12设于本体24在第一方向y上的同一侧。也即为当将扫地机器人100放置于地面上时,第一供电件13位于风道组件12的左侧和/或右侧,这样避免了将供电件与风道组件12前后排布,提高了扫地机器人100的空间利用率,从而减少了扫地机器人100的体积。
115.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
116.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1