具有声学表面类型传感器的机器人清洁器的制作方法
具有声学表面类型传感器的机器人清洁器
1.相关申请交叉引用
2.本技术要求2019年9月20日提交的标题为“具有声学表面类型传感器的机器人真空清洁器(robotic vacuum cleaner having acoustic surface type sensor)”的第62/903,319号美国临时申请和2020年3月4日提交的标题为“具有声学表面类型传感器的机器人真空清洁器(robotic vacuum cleaner having acoustic surface type sensor)”的第62/985,099号美国临时申请的权益,所述临时申请均以引用的方式完全并入本文中。
技术领域
3.本公开大体上涉及表面处理设备,并且更具体地说,涉及一种机器人清洁器。
背景技术:
4.表面处理设备可包括机器人清洁器。机器人清洁器被配置成在表面四处自主行进,同时收集留在表面上的碎屑。机器人清洁器可被配置成根据随机和/或预定路径沿着表面行进。当根据随机路径沿着表面行进时,机器人清洁器可响应于遇到一个或多个障碍物而调整其行进路径。当根据预定路径沿着表面行进时,机器人清洁器可在先前操作中形成待清洁区域的地图,并且基于所述地图根据预定路径在所述区域四处行进。无论机器人清洁器是否被配置成根据随机或预定路径行进,机器人清洁器都可被配置成以预定模式行进。例如,可使机器人清洁器位于碎屑多的位置并使其进入清洁模式,所述清洁模式使得机器人清洁器在预定时间内保持在碎屑多的位置。
技术实现要素:
附图说明
5.这些和其它特征和优势将通过阅读以下结合附图进行的详细描述而得到更好的理解,附图中:
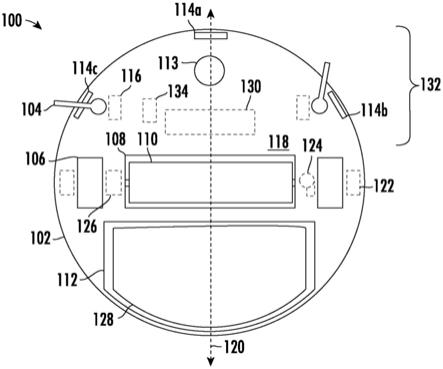
6.图1是根据本公开的实施例的机器人清洁器的示例的示意性仰视图。
7.图2是根据本公开的实施例的被配置成确定表面类型的电路的框图。
8.图3是根据本公开的实施例的湿法/干法机器人清洁器的示例的仰视图。
9.图4是根据本公开的实施例的图3的湿法/干法机器人清洁器的表面类型传感器的示例的分解图。
10.图5是根据本公开的实施例的图4的表面类型传感器的横截面图。
11.图6是根据本公开的实施例的表面类型检测方法的示例的流程图。
12.图7是根据本公开的实施例的从图4的表面类型传感器接收到的对应于软表面的被放大信号的示例。
13.图8是根据本公开的实施例的从图4的表面类型传感器接收到的对应于硬表面的被放大信号的示例。
14.图9是根据本公开的实施例的表面类型检测方法的示例的流程图。
15.图10是根据本公开的实施例的对图7的被放大信号执行的傅里叶变换(fourier transform)的图例。
16.图11是根据本公开的实施例的对图8的被放大信号执行的傅里叶变换的图例。
17.图12是根据本公开的实施例的表面类型检测方法的示例的流程图。
18.图13是根据本公开的实施例的在预定时间段内使用傅里叶变换转换到频域的信号的第一和第二曲线下面积的比率图的图例,每个面积对应于不同频率范围,并且所述预定时间段包括发生铺有地毯的地面与硬木地面之间的过渡。
19.图14是根据本公开的实施例的表面类型检测方法的示例的流程图。
20.图15是根据本公开的实施例的表面类型检测方法的示例的流程图。
21.图16是根据本公开的实施例的表面类型检测方法的示例的流程图。
具体实施方式
22.本公开大体上涉及一种机器人清洁器(例如,机器人真空清洁器)。机器人清洁器可包括:抽吸电机,其被配置成在空气入口处产生抽吸;至少一个边刷,其具有边刷电机,所述边刷被配置成将表面上的碎屑推向所述空气入口;集尘杯,其用于收集推入所述空气入口的碎屑;以及表面类型传感器。所述机器人清洁器被配置成至少部分地基于从待清洁表面(例如地面)反射并被表面类型传感器检测到的机器人电机声音(例如由机器人清洁器的一个或多个电机产生的声音)来检测表面类型。另外或替代地,所述机器人清洁器可被配置成至少部分地基于由声发射器(例如扬声器)产生的从待清洁表面反射并由表面类型传感器检测到的声发射(或声音)来检测表面类型。所述声发射器可在一定位置耦合到机器人清洁器,使得由其产生的发射在待清洁表面的方向上行进。
23.图1示出机器人清洁器100的示意性仰视图。如图所示,机器人清洁器100包括主体102、相对于主体102可旋转的一个或多个边刷104、耦合到主体102并且被配置成在待清洁表面上推动机器人清洁器100的一个或多个驱动轮106、其中安置可旋转搅动器110的空气入口108、集尘杯112、非驱动支撑轮113(例如脚轮)和耦合到主体102的一个或多个表面类型传感器114。所述一个或多个表面类型传感器114可用于使用例如从待清洁表面(例如地面)反射的机器人电机声音来检测表面类型,所述机器人电机声音由机器人清洁器100的一个或多个电机产生。
24.所述一个或多个边刷104可由安置在主体102内的对应边刷电机116(以隐线示出)驱动。边刷电机116的激活引起相应边刷104围绕横向于(例如大体上垂直于)主体102的底部表面118延伸的轴线的对应旋转。一个或多个边刷104的旋转将待清洁表面(例如,地面)上的碎屑推向主体102的中心轴线120,其中所述中心轴线120平行于机器人清洁器的前移方向延伸。换句话说,一个或多个边刷104的旋转将待清洁表面(例如地面)上的碎屑推向空气入口108。
25.一个或多个驱动轮106可由对应的驱动电机122(以隐线示出)驱动。驱动电机122的激活引起相应驱动轮106的对应旋转。多个驱动轮106的差动旋转可用于在待清洁表面上操纵机器人清洁器100。
26.空气入口108可流体耦合到抽吸电机124。抽吸电机124被配置成使空气入口108处
产生吸力,使得沉积在待清洁表面上的碎屑可被推入空气入口108中。可旋转搅动器110可由对应的搅动器电机126驱动。可旋转搅动器110的旋转可使可旋转搅动器110的至少一部分接合待清洁表面并且逐出上面沉积的至少一部分碎屑。接着,逐出的碎屑可因抽吸电机124产生的抽吸而被抽吸到空气入口108中。
27.集尘杯112流体耦合空气入口108和抽吸电机124,使得抽吸到空气入口108中的至少一部分碎屑可沉积在集尘杯112内。集尘杯112还可包括与其以可移除方式耦合的垫128。垫128可被配置成接收液体,使得机器人清洁器100可进行湿法清洁。
28.如图所示,机器人清洁器100可包括前向表面类型传感器114a、左表面类型传感器114b和右表面类型传感器114c。例如,左表面类型传感器114b和右表面类型传感器114c可安置在主体102的中心轴线120的相对侧,而前向表面类型传感器114a可定位成使得中心轴线120延伸穿过前向表面类型传感器114a。然而,其它配置是可能的。例如,机器人清洁器100可仅包括布置在主体102的中心轴线120的相对侧的左表面类型传感器114b和右表面类型传感器114c。作为另外的示例,机器人清洁器100可仅包括布置在中心轴线120上的前向表面类型传感器114a,使得中心轴线120延伸穿过前向表面类型传感器114a。包括左表面类型传感器114b和右表面类型传感器114c允许机器人清洁器100(例如,使用控制器130)确定机器人清洁器100相对于表面类型过渡处的取向(例如,使得机器人清洁器100可被控制以沿着表面类型的过渡处)。
29.表面类型传感器114a、114b和114c可耦合到机器人清洁器100的主体102并且沿着主体的外周布置。例如,并且如图所示,表面类型传感器114a、114b和114c可围绕主体102的前向部分132的外周布置。前向部分132对应于主体102的从一个或多个驱动轮106延伸并在一个或多个边刷104的方向上延伸的部分。
30.通过沿着主体102的前向部分132的外周布置表面类型传感器114a、114b和114c,机器人清洁器100可能够在机器人清洁器100越过表面类型过渡处之前(例如,在一个或多个驱动轮106越过过渡处之前)检测到表面类型的过渡处。例如,机器人清洁器100可被配置成避免越过表面类型过渡处。由此,可防止清洁工具(例如,可旋转搅动器110或垫128)中的一个或多个越过表面类型过渡处。这可例如防止湿垫128接触铺有地毯的表面(从而可能防止损坏铺有地毯的表面)。在一些情况下,表面类型传感器114可仅在机器人清洁器100进行湿法清洁(例如,垫128是湿的)时被激活。这可使控制器130的功耗降低和/或处理负荷减小。在其它情况下,表面类型传感器114可在湿法和干法清洁操作中均处于作用中。在这些情况下,表面类型传感器114还可用于检测不存在表面(例如台阶边缘)。
31.一个或多个表面类型传感器114可以是声学传感器,其被配置成检测从待清洁表面反射的机器人电机声音。机器人电机声音可包括由机器人清洁器100的一个或多个电机(例如边刷电机116、驱动电机122、抽吸电机124和/或搅动器电机126中的一个或多个)产生的声音。机器人电机声音可在从待清洁表面反射之后由一个或多个表面类型传感器114检测到。反射的机器人电机声音可具有足够可预测的声波标记图(例如振幅和/或频率分布),以允许机器人清洁器100至少部分地基于反射的机器人电机声音来确定表面类型。换句话说,可使用自然产生的声音(例如由机器人清洁器100的操作产生的声音,例如机器人电机声音)而非人工产生的声音(例如由声发射器出于表面类型检测的目的而产生的声音)来确定表面类型。由此,可使用表面类型传感器114而不使用声发射器(例如扬声器)来确定表面
类型。此类配置可减小由机器人清洁器100产生的总噪声、生产机器人清洁器100的成本和/或机器人清洁器100的大小。
32.一个或多个表面类型传感器114可定位成接近于边刷电机116、驱动电机122、抽吸电机124和/或搅动器电机126中的一个或多个(例如定位在小于或等于对应电机的最大宽度或直径的两倍的距离内)。通过将一个或多个表面类型传感器114定位在对应电机附近,可更容易标识被反射声音的声波标记图。例如,反射的信号的量值在接近于电机的位置可能较大。如图所示,左表面类型传感器114b和右表面类型传感器114c可定位成接近于对应的边刷电机116。此类定位可使边刷104与待清洁表面的接合所产生的噪声(或不合需要的声学干扰)的量最小化。
33.另外或替代地,一个或多个表面类型传感器114可被配置成检测由一个或多个声发射器(例如扬声器)134(以隐线示出)产生的在从待清洁表面反射之后的发射声音。声发射器134可定位成使得声发射器134具有在待清洁表面的方向上延伸的发射轴线。发射的声音可在例如1赫兹(hz)到100khz的范围内。作为另一示例,发射的声音可在20hz到20khz的范围内。作为又一示例,发射的声音可在20khz到100khz的范围内。在一些情况下,表面类型传感器114可包括声发射器134。使用由声发射器134产生的在从待清洁表面反射之后的发射,而非或连同机器人电机声音,可提高表面类型检测的准确性。
34.在一些情况下,声发射器134可被配置成至少部分地基于机器人电机声音来产生发射。例如,发射的声音可至少部分地基于由一个或多个表面类型传感器114检测到的被反射声音。在一些情况下,声发射器134可被配置成发射通常模仿(例如接近)由机器人清洁器100的一个或多个电机产生的声音的发射声音。换句话说,声发射器134可被配置成产生模仿机器人电机声音的声发射。
35.图2示出其中表面类型传感器114用于确定表面类型的示意性电路框图的示例。如图所示,表面类型传感器114电耦合到放大电路(或放大器)200。放大电路200被配置成放大由表面类型传感器114的麦克风202输出的信号(例如电压)。放大电路200电耦合到控制器130,使得从放大电路200输出的被放大信号可由控制器130接收。换句话说,控制器130通过放大电路200电耦合到表面类型传感器114。控制器130被配置成处理所述被放大信号,使得可确定表面类型。由此,控制器130可大体上被描述为被配置成至少部分地基于反射的机器人电机声音来确定表面类型。例如,在处理被放大信号时,控制器130可使用傅里叶变换(例如快速傅里叶变换)。控制器130还可被配置成滤除噪声(例如检测到的声音中的不合需要的声学干扰)。例如,控制器130可被配置成当相应的边刷104在待清洁表面与对应的表面类型传感器114之间经过时滤除检测到的声音信号中的偏差。
36.麦克风202可被配置成检测由机器人清洁器100的一个或多个电机产生的声音。例如,麦克风202可被配置成检测在1hz到100khz的频率范围内的声音。作为另一示例,麦克风202可被配置成检测在1hz到80khz的频率范围内的声音。作为又一示例,麦克风202可被配置成检测在20hz到20khz的频率范围内的声音。
37.图3示出机器人湿法/干法清洁器300的示例的仰视图,所述清洁器可以是图1的机器人清洁器100的示例。如图所示,机器人湿法/干法清洁器300包括多个边刷302、多个驱动轮304、其中具有可旋转搅动器308的空气入口306、前向非驱动轮310、后向非驱动轮312、集尘杯314、以可移除方式耦合到集尘杯314的垫316以及多个表面类型传感器318(例如左表
面类型传感器318a和右表面类型传感器318b)。多个边刷302可由对应的边刷电机320(示意性地以隐线示出)驱动,多个驱动轮304可由对应的驱动电机322(示意性地以隐线示出)驱动,并且可旋转搅动器308可通过对应的搅动器电机324(示意性地以隐线示出)进行旋转。机器人湿法/干法清洁器300还可包括抽吸电机326(示意性地以隐线示出),所述抽吸电机被配置成使空气入口306处产生吸力以使得沉积在待清洁表面(例如地面)上的碎屑可被推走。
38.表面类型传感器318可与垫316间隔开一定距离,所述距离足以准许机器人湿法/干法清洁器300(例如使用控制器328,以隐线示意性地示出)确定表面类型过渡处并且在垫316到达过渡处之前更改清洁器的前进方向。此类配置可防止垫316接触邻近表面类型。例如,传感器-垫分隔距离330可处于100毫米(mm)到150mm的范围内。作为另一示例,传感器-垫分隔距离330可为130mm。在一些情况下,传感器分隔距离332可被配置成最大化,同时仍使传感器-垫分隔距离330的量值足以允许机器人清洁器300改变方向并防止垫316越过检测到的表面类型过渡处。
39.图4示出表面类型传感器318的透视分解图,而图5示出表面类型传感器318的横截面图。如图所示,表面类型传感器318包括印刷电路板(pcb)400、电耦合到pcb 400的连接器402和电耦合到pcb 400的麦克风404。如图所示,pcb 400包括麦克风开口406,麦克风404的至少一部分定位在所述麦克风开口上。麦克风开口406与准直仪408对准(例如居中对准)。准直仪408可以是延伸穿过表面类型传感器318的主体410的管,其被配置成将声能(例如从待清洁表面反射的声音)引导到麦克风404中。麦克风404可以是陶瓷麦克风。在一些情况下,pcb 400可包括被配置成放大麦克风404的输出的放大器电路。
40.图6示出使用例如表面类型传感器318的表面类型检测方法600的示例的流程图。表面类型检测方法600可包括步骤602。步骤602可包括在表面类型传感器318的麦克风404处接收声音,以及从麦克风404输出对应于接收到的声音的信号。接收到的声音包括由边刷电机320、驱动电机322、搅动器电机324和/或抽吸电机326中的一个或多个产生并从待清洁表面反射的机器人电机声音。
41.表面类型检测方法600还可包括步骤604。步骤604可包括放大从麦克风404输出的信号。软表面(例如地毯)的被放大信号的示例大体上在图7中示出,而硬表面(例如硬木)的被放大信号的示例大体上在图8中示出。
42.表面类型检测方法600可包括步骤606。步骤606可包括对被放大输出求平均值。如从图7和8可见,对应于软表面的平均被放大输出可小于对应于硬表面的平均被放大输出。
43.表面类型检测方法600可包括步骤608。步骤608可包括将平均被放大输出与阈值进行比较,并且至少部分地基于与阈值的比较来确定表面类型(例如,硬地面或软地面)。
44.图9示出使用例如表面类型传感器318的表面类型检测方法900的示例的流程图。表面类型检测方法900可包括步骤902。步骤902可包括在表面类型传感器318的麦克风404处接收声音,以及从麦克风404输出对应于接收到的声音的信号。接收到的声音包括由边刷电机320、驱动电机322、搅动器电机324和/或抽吸电机326中的一个或多个产生并从待清洁表面反射的机器人电机声音。
45.表面类型检测方法900还可包括步骤904。步骤904可包括放大从麦克风404输出的信号。软表面(例如地毯)的被放大信号的示例大体上在图7中示出,而硬表面(例如硬木)的
被放大信号的示例大体上在图8中示出。在一些情况下,从麦克风404输出的信号可能未被放大,而可能以未放大状态被处理,如在步骤906中所论述。
46.表面类型检测方法900可包括步骤906。步骤906可包括处理被放大信号。处理被放大信号可包括将被放大信号转换成频域(例如转换成对应于声频的值)。例如,可使用傅里叶变换来处理被放大信号以获得对应的声频。图10中示出对图7的被放大信号执行的傅里叶变换的图例,而图11中示出对图8的被放大信号执行的傅里叶变换的图例。图10和11的图形表示绘示了构成检测到的声音信号的频率和对应于每个检测到的频率的相对量值。例如,并且如图所示,所述图形表示可在x轴上绘示频率并且在y轴上绘示相对量值。处理被放大信号还可包括滤除被放大信号中的噪声。噪声可包括由于例如一个或多个边刷302在待清洁表面与表面类型传感器318之间经过而产生的偏差。
47.在一些情况下,处理被放大信号可包括使用快速傅里叶变换。可在多个预定时间间隔(例如,2毫秒、5毫秒、10毫秒、15毫秒和/或任何其它时间间隔)中使用快速傅里叶变换处理信号,并且可对快速傅里叶变换的对应输出求平均。例如,可在五个五毫秒预定时间间隔中执行快速傅里叶变换,并且可对快速傅里叶变换的输出求平均。可通过对快速傅里叶变换的输出求平均来产生图形。
48.表面类型检测方法900还可包括步骤908。步骤908可包括针对至少一个频率范围计算x轴与傅里叶变换的绘制表示之间的面积(例如曲线下面积)。换句话说,可在至少一个频率范围中对转换的信号进行积分。例如,所述频率范围可从0hz延伸到30khz。在一些情况下,所述频率范围可大体上对应于机器人电机声音的频率范围。
49.表面类型检测方法900还可包括步骤910。步骤910可包括将计算出的曲线下面积与阈值进行比较,并且至少部分地基于所述比较来确定表面类型(例如,硬地面或软地面)。换句话说,可将积分信号与阈值进行比较,并且可至少部分地基于所述比较来确定表面类型。
50.图12示出使用例如表面类型传感器318的表面类型检测方法1200的示例的流程图。表面类型检测方法1200可包括步骤1202。步骤1202可包括在表面类型传感器318的麦克风404处接收声音,以及从麦克风404输出对应于接收到的声音的信号。接收到的声音包括由边刷电机320、驱动电机322、搅动器电机324和/或抽吸电机326中的一个或多个产生并从待清洁表面反射的机器人电机声音。
51.表面类型检测方法1200还可包括步骤1204。步骤1204可包括放大从麦克风404输出的信号。软表面(例如地毯)的被放大信号的示例大体上在图7中示出,而硬表面(例如硬木)的被放大信号的示例大体上在图8中示出。在一些情况下,从麦克风404输出的信号可能未被放大,而可能以未放大状态被处理,如在步骤1206中所论述。
52.表面类型检测方法1200可包括步骤1206。步骤1206可包括处理被放大信号。处理被放大信号可包括将被放大信号转换成频域(例如转换成对应于声频的值)。例如,可使用傅里叶变换来处理被放大信号以获得对应的声频。图10中示出对图7的被放大信号执行的傅里叶变换的图例,而图11中示出对图8的被放大信号执行的傅里叶变换的图例。图10和11的图形表示绘示了构成检测到的声音信号的频率和对应于每个检测到的频率的相对量值。例如,并且如图所示,所述图形表示可在x轴上绘示频率并且在y轴上绘示相对量值。处理被放大信号还可包括滤除被放大信号中的噪声。噪声可包括由于例如一个或多个边刷302在
待清洁表面与表面类型传感器318之间经过而产生的偏差。
53.在一些情况下,处理被放大信号可包括使用快速傅里叶变换。可在多个预定时间间隔(例如,2毫秒、5毫秒、10毫秒、15毫秒和/或任何其它时间间隔)中使用快速傅里叶变换处理信号,并且可对快速傅里叶变换的对应输出求平均。例如,可在五个五毫秒预定时间间隔中执行快速傅里叶变换,并且可对快速傅里叶变换的输出求平均。可通过对快速傅里叶变换的输出求平均来产生图形。
54.表面类型检测方法1200还可包括步骤1208。步骤1208可包括针对第一频率范围和第二频率范围计算x轴与傅里叶变换的绘制表示之间的面积(例如曲线下面积)。换句话说,可在至少两个频率范围中对转换的信号进行积分。第一频率范围可大体上对应于从软表面最好地反射的一系列频率,而第二频率范围可大体上对应于从硬表面最好地反射的一系列频率。例如,第一频率范围可从0hz延伸到10khz,而第二频率范围可从15khz延伸到20khz。
55.表面类型检测方法1200还可包括步骤1210。步骤1210可包括计算对应于第一和第二频率范围的曲线下面积的比率。换句话说,可计算对应于第一频率范围的积分信号与第二频率范围的积分信号的比率。例如,可计算第一和第二频率范围处的积分信号的比率,其中第一频率范围的积分信号除以第二频率范围的积分信号。图13示出在发生铺有地毯的地面与硬木地面之间的过渡的预定时间段内计算的比率的曲线图的示例。
56.表面类型检测方法1200还可包括步骤1211。步骤1211可包括产生调整后的比率。调整后的比率可基于一个或多个先前计算的比率和当前计算的比率。例如,可通过将当前计算的比率乘以第一系数、将一个或多个先前计算的比率乘以一个或多个额外系数并对乘法的结果求和来计算调整后的比率。在一些情况下,可使用无限脉冲响应滤波器计算调整后的比率。方程式1示出能够用于使用当前计算的比率、先前计算的比率(例如就在当前计算的比率之前计算的比率)和系数(其中所述系数少于一)产生调整后的比率的无限脉冲响应(iir)滤波器的示例。
57.[方程式1]
[0058]
iirn=(当前比率)*(系数)+(先前比率)*(1-系数)
[0059]
表面类型检测方法1200还可包括步骤1212。步骤1212可包括将当前计算的比率(或调整后的比率)与阈值进行比较,并且至少部分地基于所述比较来确定表面类型(例如,硬地面或软地面)。在一些情况下,可针对不同对频率范围来计算多个比率。这些比率中的每一者可与对应的阈值进行比较,并且至少部分地基于所述比较可确定表面类型。
[0060]
在一些情况下,可存储比较的结果(例如超过阈值或低于阈值),并且可在已存储预定数目的比较结果之后确定表面类型。例如,在已存储预定数目的比较输出(例如,三个)之后,可至少部分地基于存储的比较的预定数目(例如两个)指示阈值被超过而确定表面类型。
[0061]
当使用调整后的比率时,相比于仅使用当前计算的比率,地面类型确定可更准确。例如,调整后的地面类型比率可弱化用于计算比率的信号内的噪声影响,从而潜在地减少误报(或地面类型变化的错误指示)的发生。
[0062]
图14示出使用例如表面类型传感器318的表面类型检测方法1400的示例的流程图。表面类型检测方法1400可包括步骤1402。步骤1402可包括在表面类型传感器318的麦克风404处接收声音,以及从麦克风404输出对应于接收到的声音的信号。接收到的声音包括
由边刷电机320、驱动电机322、搅动器电机324和/或抽吸电机326中的一个或多个产生并从待清洁表面反射的机器人电机声音。
[0063]
表面类型检测方法1400还可包括步骤1404。步骤1404可包括放大从麦克风404输出的信号。软表面(例如地毯)的被放大信号的示例大体上在图7中示出,而硬表面(例如硬木)的被放大信号的示例大体上在图8中示出。在一些情况下,从麦克风404输出的信号可能未被放大,而可能以未放大状态被处理,如在步骤1406中所论述。
[0064]
表面类型检测方法1400可包括步骤1406。步骤1406可包括处理被放大信号。处理被放大信号可包括将被放大信号转换成频域(例如转换成对应于声频的值)。例如,可使用傅里叶变换来处理被放大信号以获得对应的声频。图10中示出对图7的被放大信号执行的傅里叶变换的图例,而图11中示出对图8的被放大信号执行的傅里叶变换的图例。图10和11的图形表示绘示了构成检测到的声音信号的频率和对应于每个检测到的频率的相对量值。例如,并且如图所示,所述图形表示可在x轴上绘示频率并且在y轴上绘示相对量值。处理被放大信号还可包括滤除被放大信号中的噪声。噪声可包括由于例如一个或多个边刷302在待清洁表面与表面类型传感器318之间经过而产生的偏差。
[0065]
在一些情况下,处理被放大信号可包括使用快速傅里叶变换。可在多个预定时间间隔(例如,2毫秒、5毫秒、10毫秒、15毫秒和/或任何其它时间间隔)中使用快速傅里叶变换处理信号,并且可对快速傅里叶变换的对应输出求平均。例如,可在五个五毫秒预定时间间隔中执行快速傅里叶变换,并且可对快速傅里叶变换的输出求平均。可通过对快速傅里叶变换的输出求平均来产生图形。
[0066]
表面类型检测方法1400可包括步骤1408。步骤1408可包括计算处理后的信号在一个或多个频率范围内的斜率(或量值变化除以频率变化)。例如,可计算对应于处理后的信号的第一频率范围的第一斜率,并且可计算对应于处理后的信号的第二频率范围的第二斜率。在一些情况下,第一频率范围可大体上对应于从软表面最好地反射的一系列频率,而第二频率范围可大体上对应于从硬表面最好地反射的一系列频率。例如,第一频率范围可从0hz延伸到10khz,而第二频率范围可从15khz延伸到20khz。
[0067]
在一些情况下,可在计算某一频率范围中的斜率之前将处理后的信号归一化。将处理后的信号归一化可包括将一个或多个频率范围处的处理后的信号除以所述一或多个频率范围处对应的直流电(dc)信号。处理后的信号的归一化可考虑到测得声音中的绝对差异。
[0068]
表面类型检测方法1400还可包括步骤1410。步骤1410可包括将计算的斜率与阈值进行比较,并且至少部分地基于所述比较来确定表面类型(例如,硬地面或软地面)。在一些情况下,可计算多个倾斜,每个倾斜对应于相应频率范围。这些斜率中的每一个可与对应的阈值进行比较,并且至少部分地基于所述比较可确定表面类型。
[0069]
在一些情况下,可存储比较的结果(例如超过阈值或低于阈值),并且可在已存储预定数目的比较结果之后确定表面类型。例如,在已存储预定数目的比较输出(例如,三个)之后,可至少部分地基于存储的比较的预定数目(例如两个)指示阈值被超过而确定表面类型。
[0070]
图15示出使用例如表面类型传感器318的表面类型检测方法1500的示例的流程图。表面类型检测方法1500可包括步骤1502。步骤1502可包括在表面类型传感器318的麦克
风404处接收声音,以及从麦克风404输出对应于接收到的声音的信号。接收到的声音包括由边刷电机320、驱动电机322、搅动器电机324和/或抽吸电机326中的一个或多个产生并从待清洁表面反射的机器人电机声音。
[0071]
表面类型检测方法1500还可包括步骤1504。步骤1504可包括放大从麦克风404输出的信号。软表面(例如地毯)的被放大信号的示例大体上在图7中示出,而硬表面(例如硬木)的被放大信号的示例大体上在图8中示出。在一些情况下,从麦克风404输出的信号可能未被放大,而可能以未放大状态被处理,如在步骤1506中所论述。
[0072]
表面类型检测方法1500可包括步骤1506。步骤1506可包括处理被放大信号。处理被放大信号可包括将被放大信号转换成频域(例如转换成对应于声频的值)。例如,可使用傅里叶变换来处理被放大信号以获得对应的声频。图10中示出对图7的被放大信号执行的傅里叶变换的图例,而图11中示出对图8的被放大信号执行的傅里叶变换的图例。图10和11的图形表示绘示了构成检测到的声音信号的频率和对应于每个检测到的频率的相对量值。例如,并且如图所示,所述图形表示可在x轴上绘示频率并且在y轴上绘示相对量值。处理被放大信号还可包括滤除被放大信号中的噪声。噪声可包括由于例如一个或多个边刷302在待清洁表面与表面类型传感器318之间经过而产生的偏差。
[0073]
在一些情况下,处理被放大信号可包括使用快速傅里叶变换。可在多个预定时间间隔(例如,2毫秒、5毫秒、10毫秒、15毫秒和/或任何其它时间间隔)中使用快速傅里叶变换处理信号,并且可对快速傅里叶变换的对应输出求平均。例如,可在五个五毫秒预定时间间隔中执行快速傅里叶变换,并且可对快速傅里叶变换的输出求平均。可通过对快速傅里叶变换的输出求平均来产生图形。
[0074]
表面类型检测方法1500可包括步骤1508。步骤1508可包括计算信号在一个或多个频率范围内的最大和/或最小量值。在一些情况下,针对每个频率范围计算最大和最小量值。在一些情况下,针对多个频率范围中的每个频率范围计算最大或最小量值中的仅一个。
[0075]
表面类型检测方法1500可包括步骤1510。步骤1510可包括计算信号在一个或多个频率范围内的计算出的最小量值与最大量值之间的比率。在一些情况下,可使用对应于不同频率范围的最大和最小量值来计算比率。例如,可使用第一频率范围的最大值或最小值以及第二频率范围的最大值或最小值来计算比率(例如最大值之间的比率、最小值之间的比率或最大值与最小值之间的比率)。在一些情况下,可使用对应于相同频率范围的最大和最小量值计算至少一个比率。
[0076]
在一些情况下,可针对大体上对应于从软表面最好地反射的一系列频率的第一频率范围计算最大和/或最小量值,并且可针对大体上对应于从硬表面最好地反射的一系列频率的第二频率范围计算最大和/或最小量值。例如,第一频率范围可从0hz延伸到10khz,而第二频率范围可从15khz延伸到20khz。
[0077]
表面类型检测方法1500可包括步骤1512。步骤1512可包括将计算的一个或多个比率与一个或多个阈值进行比较,并且至少部分地基于所述比较来确定地面类型。在一些情况下,可存储比较的结果(例如超过阈值或低于阈值)并且可在已存储预定数目的比较结果之后确定表面类型。例如,在已存储预定数目的比较输出(例如,三个)之后,可至少部分地基于存储的比较的预定数目(例如两个)指示阈值被超过而确定表面类型。
[0078]
图16示出使用例如表面类型传感器318的表面类型检测方法1600的示例的流程
图。表面类型检测方法1600可包括步骤1602。步骤1602可包括在表面类型传感器318的麦克风404处接收声音,以及从麦克风404输出对应于接收到的声音的信号。接收到的声音包括由边刷电机320、驱动电机322、搅动器电机324和/或抽吸电机326中的一个或多个产生并从待清洁表面反射的机器人电机声音。
[0079]
表面类型检测方法1600还可包括步骤1604。步骤1604可包括放大从麦克风404输出的信号。软表面(例如地毯)的被放大信号的示例大体上在图7中示出,而硬表面(例如硬木)的被放大信号的示例大体上在图8中示出。在一些情况下,从麦克风404输出的信号可能未被放大,而可能以未放大状态被处理,如在步骤1606中所论述。
[0080]
表面类型检测方法1600还可包括步骤1606。步骤1606可包括处理被放大信号。处理被放大信号可包括使用解调计算(例如i/q解调计算)以确定信号在两个或更多个频率下的量值。例如,可针对第一和第二频率计算被放大信号的量值。
[0081]
表面类型检测方法1600还可包括步骤1608。步骤1608可包括确定各对确定的量值之间的比率。例如,可确定第一确定的量值与第二确定的量值之间的比率。
[0082]
表面类型检测方法1600还可包括步骤1610。步骤1610可包括将计算的一个或多个比率与一个或多个阈值进行比较,并且至少部分地基于所述比较来确定地面类型。在一些情况下,可存储比较的结果(例如超过阈值或低于阈值),并且可在已存储预定数目的比较结果之后确定表面类型。例如,在已存储预定数目的比较输出(例如,三个)之后,可至少部分地基于存储的比较的预定数目(例如两个)指示阈值被超过而确定表面类型。
[0083]
使用解调计算而非傅里叶变换(例如快速傅里叶变换)可减少处理要求但可能减小地面类型预测的准确性。使用解调计算时的准确性可通过增大在其处计算信号量值的频率的数目来提高。然而,增大在其处计算信号量值的频率的数目可能会增大处理要求。
[0084]
虽然表面类型检测方法600、900、1200、1400、1500和1600大体上论述基于至少部分地基于机器人电机声音来确定表面类型,但表面类型检测方法600、900、1200、1400、1500和1600可另外(或替代地)使用从声发射器(例如图1的声发射器134)发射的在从待清洁表面反射之后的声音。发射的声音可在例如1hz到100khz的范围内。作为另一示例,发射的声音可在20hz到20khz的范围内。作为又一示例,发射的声音可在20khz到100khz的范围内。
[0085]
表面类型检测方法600、900、1200、1400、1500和1600可体现在(例如控制器328的)一个或多个非瞬态计算机可读介质中作为上面存储的一个或多个指令,所述一个或多个指令在由(例如控制器328的)一个或多个处理器执行时使对应的表面类型检测方法600、900、1200、1400、1500或1600被执行。例如,控制器大体上可被描述为被配置成执行表面类型检测方法600、900、1200、1400、1500和/或1600中的一个或多个方法的至少一部分。另外或替代地,表面类型检测方法600、900、1200、1400、1500和1600可体现于电路系统(例如,专用集成电路系统、现场可编程门阵列和/或其类似者)中。在一些情况下,表面类型检测方法600、900、1200、1400、1500和1600的一部分可使用电路系统执行,而一部分可使用体现在一个或多个非瞬态计算机可读介质中的一个或多个指令执行。
[0086]
此外,在一些情况下,地面类型的确定可使用一个或多个机器学习算法来提高地面类型的确定的准确性。例如,机器学习算法可被配置成标识最能指示特定地面类型的频率范围。在一些情况下,机器学习算法可被配置成指派对应于特定频率范围的权重或系数。在一些情况下,机器学习算法可被配置成产生将由机器人清洁器用以进行地面类型检测的
算法。
[0087]
根据本公开的机器人清洁器的示例可包括:主体;一个或多个驱动轮,其耦合到所述主体;一个或多个表面类型传感器,其耦合到所述主体,所述一个或多个表面类型传感器被配置成接收从待清洁表面反射的机器人电机声音,所述机器人电机声音由所述机器人清洁器的一个或多个电机产生;以及控制器,其被配置成至少部分地基于反射的机器人电机声音来确定表面类型。
[0088]
在一些情况下,所述一个或多个表面类型传感器可包括左表面类型传感器和右表面类型传感器,左、右表面类型传感器安置在主体的中心轴线的相对侧。在一些情况下,左、右表面类型传感器可沿着主体的外周布置。在一些情况下,机器人电机声音可由抽吸电机、边刷电机、驱动电机和/或搅动器电机中的一个或多个电机产生。在一些情况下,所述机器人清洁器还可包括被配置成由边刷电机驱动的边刷,所述一个或多个表面类型传感器中的至少一个可定位成接近于所述边刷电机。在一些情况下,所述一个或多个表面类型传感器可包括麦克风。在一些情况下,所述机器人清洁器还可包括被配置成产生声发射的声发射器,所述声发射可模仿机器人电机声音。
[0089]
根据本公开的机器人清洁器的另一示例可包括:一个或多个表面类型传感器,其被配置成接收从待清洁表面反射的机器人电机声音,所述机器人电机声音由机器人清洁器的一个或多个电机产生;以及控制器,其电耦合到所述一个或多个表面类型传感器并且被配置成执行表面类型检测方法。所述表面类型检测方法可包括:将从所述一个或多个表面类型传感器接收的信号转换到频域;在至少一个频率范围中对转换的信号进行积分;将积分信号与阈值进行比较;以及至少部分地基于所述比较来确定表面类型。
[0090]
在一些情况下,所述一个或多个表面类型传感器可包括左表面类型传感器和右表面类型传感器,左、右表面类型传感器安置在所述机器人清洁器的主体的中心轴线的相对侧。在一些情况下,左、右表面类型传感器可沿着主体的外周布置。在一些情况下,机器人电机声音可由抽吸电机、边刷电机、驱动电机和/或搅动器电机中的一个或多个电机产生。在一些情况下,边刷可被配置成由边刷电机驱动,所述一个或多个表面类型传感器中的至少一个可定位成接近于所述边刷电机。在一些情况下,所述机器人清洁器还可包括被配置成放大所述一个或多个表面类型传感器的输出的放大器。在一些情况下,所述一个或多个表面类型传感器可包括麦克风。
[0091]
根据本公开的机器人清洁器的又一示例可包括:一个或多个表面类型传感器,其被配置成接收从待清洁表面反射的机器人电机声音,所述机器人电机声音由机器人清洁器的一个或多个电机产生;以及控制器,其电耦合到所述一个或多个表面类型传感器并且被配置成执行表面类型检测方法。所述表面类型检测方法可包括:将从所述一个或多个表面类型传感器接收的信号转换到频域;在第一和第二频率范围中对转换的信号进行积分;计算对应于第一频率范围的积分信号与第二频率范围的积分信号的比率;将所述比率与阈值进行比较;以及至少部分地基于所述比较来确定表面类型。
[0092]
在一些情况下,所述一个或多个表面类型传感器可包括左表面类型传感器和右表面类型传感器,左、右表面类型传感器安置在所述机器人清洁器的主体的中心轴线的相对侧。在一些情况下,左、右表面类型传感器沿着主体的外周布置。在一些情况下,机器人电机声音可由抽吸电机、边刷电机、驱动电机和/或搅动器电机中的一个或多个电机产生。在一
些情况下,所述机器人清洁器还可包括被配置成由边刷电机驱动的边刷,所述一个或多个表面类型传感器中的至少一个可定位成接近于所述边刷电机。在一些情况下,所述机器人清洁器还可包括被配置成放大所述一个或多个表面类型传感器的输出的放大器。在一些情况下,所述一个或多个表面类型传感器可包括麦克风。
[0093]
根据本公开的机器人清洁器的又一示例可包括:声发射器,其被配置成在待清洁表面的方向上产生声发射以使得所述声发射从待清洁表面反射;一个或多个表面类型传感器,其被配置成接收反射的声发射;以及控制器,其电耦合到所述一个或多个表面类型传感器并且被配置成执行表面类型检测方法。所述表面类型检测方法可包括:将从所述一个或多个表面类型传感器接收的信号转换到频域;在至少一个频率范围中对转换的信号进行积分;将积分信号与阈值进行比较;以及至少部分地基于所述比较来确定表面类型。
[0094]
在一些情况下,所述声发射可被配置成模仿机器人电机声音。在一些情况下,所述声发射可至少部分地基于由所述一个或多个表面类型传感器检测到的机器人电机声音。
[0095]
根据本公开的机器人清洁器的又一示例可包括:声发射器,其被配置成在待清洁表面的方向上产生声发射以使得所述声发射从待清洁表面反射;一个或多个表面类型传感器,其被配置成接收反射的声发射;以及控制器,其电耦合到所述一个或多个表面类型传感器并且被配置成执行表面类型检测方法。所述表面类型检测方法可包括:将从所述一个或多个表面类型传感器接收的信号转换到频域;在第一和第二频率范围中对转换的信号进行积分;计算对应于第一频率范围的积分信号与第二频率范围的积分信号的比率;将所述比率与阈值进行比较;以及至少部分地基于所述比较来确定表面类型。
[0096]
在一些情况下,所述声发射可被配置成模仿机器人电机声音。在一些情况下,所述声发射可至少部分地基于由所述一个或多个表面类型传感器检测到的机器人电机声音。
[0097]
虽然本文已描述本发明的原理,但所属领域的技术人员将理解,此描述仅作为示例而做出且并不作为关于本发明的范围的限制。除本文中示出且描述的示范性实施例之外,其它实施例也涵盖在本发明的范围内。由所属领域的技术人员进行的修改和替代被认为在本发明的范围内,本发明的范围不受以下权利要求书以外的其它限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1