一种自动煮饭机器人及使用方法与流程
1.本发明涉及家用电器技术领域,具体是指一种自动煮饭机器人及使用方法。
背景技术:
2.现在人们生活、工作的压力日益增加,越来越多人都需要加班完成工作,对于加班群体来说,结束日常劳累工作或外出后,在家做饭成为人们较为心累的现象,同时,每天早起做饭的时间更少之又少,为提高加班群体的饮食效率,现在市场出现各种高压锅、电饭锅等半自动做饭家用电器,通过将谷物或饭菜清洗干净放入锅中定时蒸煮即可使用,但还是需要手动清洗米、加水和清洗等操作,对于粥类如玉米粥,需要经常搅拌棒,不然会出现粘锅现象,普通电饭锅不能满足人们能够快速吃到食物。
技术实现要素:
3.为解决现有技术中的不足,本发明提供一种自动煮饭机器人,通过旋转搅拌模块和进料模块的配合将不同谷物通过进料口投放至锅体内,通过进排水装置进水抽水,实现快速清洗谷物并进行蒸煮,省去人们做饭的时间,增加工作和休闲的时间。
4.本发明为实现上述目的,通过以下技术方案实现:一种自动煮饭机器人,包括蒸煮模块、进料模块、旋转搅拌模块、升降模块、进排水模块和称重控制模块;
5.蒸煮模块包括锅盖、锅体以及用于支撑锅体的支撑架,锅盖上竖向固设有套筒;
6.旋转搅拌模块包括设置在套筒内的扇形柱阀壳体,扇形柱阀壳体内设有扇形柱阀芯,扇形柱阀芯内穿设有空心轴,空心轴上部设置有定位模块,定位模块包括金属块ⅰ以及与金属块ⅰ相适配的接近开关ⅰ,空心轴通过第一驱动电机驱动其旋转,扇形柱阀壳体上设置有多个进料口;
7.进料模块包括多个进料仓,多个进料仓分别与扇形柱阀壳体的进料口连通;
8.支撑架上方设有固定架,称重控制模块包括称重传感器,称重传感器固设在支撑架上方和固定架的下端位置;
9.升降模块包括固设在称重传感器上的滚珠丝杠以及用于驱动滚珠丝杠旋转的第二驱动电机,滚珠丝杠的螺母滑块与第一驱动电机的壳体固接;
10.进排水模块包括进排水管,进排水管一端与空心轴的上端通过旋转接头连接,另一端连接进排水装置。
11.锅体为现有技术,可以实现加热蒸煮的功能,进料仓为锥形结构,上宽下窄,便于谷物通过锅盖上的套筒滑落至锅体内,进料仓设置为多个,分别固设在支撑架上,并位于锅体上方,每个进料仓的出口分别与扇形柱阀壳体的多个进料口连通,根据需求,投放不同谷物进行蒸煮;扇形柱阀芯的横截面的弧长为优弧,形成一个有劣弧缺口的扇形柱阀芯,劣弧缺口的扇形柱阀芯为扇形进料开口,扇形柱阀芯的弧形面紧贴扇形柱阀壳体的进风口和多个进料口,非工作状态扇形进料开口对应扇形柱阀壳体的进风口,阻隔多个进料口落入谷物,在空心轴设置有定位模块,定位模块包括接近开关ⅰ,用于实现空心轴的定位,根据需
求,第二驱动电机为步进电机,控制第二驱动电机带动滚珠丝杠的螺母滑块向上移动,通过扇形柱阀芯旋转不同角度打开不同进料口进行进料;扇形柱阀芯外壁设有耐磨层,耐摩层为弹性材质,使阀芯与外壳内壁之间形成一定的弹性压力,用于密封各排料口。
12.升降模块还包括底座、支撑臂、滚珠丝杠以及用于驱动滚珠丝杠旋转的第二驱动电机,底座固设在支撑架的固定架上,底座上设置有滚珠丝杠,滚珠丝杠的螺母滑块固接有第一驱动电机,第二驱动电机设置在支撑臂的上端。
13.进排水装置用于连接进排水管,对锅体内进行加水和对外排水,进排水装置为现有技术,包括水泵和电控三通阀,通过切换三通阀的通路可实现一根管的进水和排水功能。
14.锅体与支撑架的下部滑接,打开锅盖可将锅体本体水平移动出锅,锅体与支撑架的下部滑接通过滑轨完成,为现有技术,在此不做赘述,通过升降空心轴带动锅盖脱离锅体本体,使锅体和锅盖分离,便于顺利移出锅体。
15.作为优选,扇形柱阀芯沿轴线开设有阀芯通孔,阀芯通孔与空心轴相适配,扇形柱阀芯上还开设有第一键槽,空心轴上固设有与第一键槽相适配的短键,短键与金属块ⅰ位于同一直线上,空心轴的下端固设有搅拌叶。
16.作为优选,扇形柱阀芯的横截面为扇形形状,扇形对应的圆心角大于180
°
,扇形柱阀芯包括扇形进料开口。
17.作为优选,空心轴的上部套设有圆盘,所述圆盘与空心轴固接,所述金属块ⅰ固设在圆盘上,所述接近开关ⅰ设置在金属块ⅰ的上方,所述接近开关ⅰ固设底座上,所述底座固设在第一驱动电机壳体上。
18.空心轴设置接近开关ⅰ用于实现空心轴的定位,短键与金属块ⅰ位于同一直线上,金属块ⅰ和短键保持相同的角度位置,当金属块ⅰ旋转至接近开关ⅰ位置时,短键和第一键槽的位置相对应。
19.作为优选,旋转搅拌模块还包括接近开关ⅱ,接近开关ⅱ设置在扇形柱阀壳体的上方,扇形柱阀壳体与接近开关ⅱ之间设置有金属块ⅱ,接近开关ⅱ与金属块ⅱ相适配。
20.金属块ⅱ和扇形柱阀芯一起转动,接近开关ⅱ设置有多个,多个接近开关ⅱ设置在锅盖上,分别与多个进料口和进气口对应,接近开关ⅱ不跟随扇形柱阀芯转动,当扇形柱阀芯带动金属块ⅱ转动,靠近接近开关ⅱ时,接近开关ⅱ输出信号,信号发送至控制器,得出扇形柱阀芯的扇形进料开口朝向,进一步的,第一驱动电机和第二驱动电机均为步进电机,步进电机在中低速时几乎为恒力矩,还可以实现精确的角度控制,控制器发出角度信号至步进电机,步进电机转动给定角度用于控制扇形柱阀芯的转动,在进风口位置设置一个接近开关ⅱ用于初始位置定位,左旋一定角度为左边的进料口,右旋一定角度为右进料口,接近开关ⅱ用于反馈扇形进料开口的朝向;称重传感器设置在支撑架和固定架之间,通过称重传感器先对锅体和支撑架称重且归零,然后再分别称谷物和水的重量。
21.作为优选,扇形柱阀壳体上还设置有进风口,锅盖上设置有冷却风扇,冷却风扇的排风口朝向进风口。
22.通过设置锅盖上设置有风扇,风扇的排风口朝向进风口,并从进排水管排风,用于防止溢锅和冷却扇形柱阀,避免造成扇形柱阀芯温度过高导致进料口附近谷物温度升高。
23.作为优选,第一驱动电机为步进电机,空心轴穿设并固接在第一驱动电机内的输出空心轴内,第一驱动电机内的输出空心轴的上端与旋转接头转动连接。
24.通过这样设置,实现空心轴的转动但第一驱动电机和进排水管不转动的功能,
25.一种自动煮饭机器人的使用方法,包括如下步骤:
26.通过金属块ⅰ确定扇形进料开口的朝向,控制第一驱动电机,将空心轴的短键旋转至第一键槽正下方,控制第二驱动电机带动螺母滑块向上移动,进而带动空心轴上移,短键进入第一键槽内;
27.空心轴旋转带动扇形柱阀芯的扇形进料开口转至进料口,通过对应的进料仓投放谷物至锅体内,不同谷物通过接近开关ⅱ控制扇形进料开口转至不同进料口进行投放并通过称重控制模块进行称重;
28.进排水装置通过进排水管进水,控制第二驱动电机带动滚珠丝杠上的螺母滑块向下移动,进而带动空心轴下移至短键脱离第一键槽,通过控制第一驱动电机带动空心轴的搅拌叶旋转,对谷物进行清洗,停止进水;
29.通过进排水装置进行抽水,反复冲洗后,根据称重传感器计算锅体内水的重量,控制进排水装置加水进行煮饭。
30.对比现有技术,本发明的有益效果在于:通过设置扇形柱阀芯的弧形面紧贴扇形柱阀壳体的进风口和多个进料口,非工作状态扇形进料开口的上放对应扇形柱阀壳体的进风口,阻隔进料口落入谷物,根据需求,控制第二驱动电机带动滚珠丝杠的螺母滑块向上移动;锅盖上设置有冷却风扇,冷却风扇的排风口朝向进风口,并从进排水管排风,用于防止溢锅和冷却扇形柱阀,避免造成扇形柱阀芯温度过高导致进料口附近谷物温度升高;多个接近开关ⅱ设置在锅盖上,分别与多个进料口和进气口对应,接近开关ⅱ不跟随扇形柱阀芯转动,当扇形柱阀芯带动金属块ⅱ转动,靠近接近开关ⅱ时,接近开关ⅱ输出信号,信号发送至控制器,得出扇形柱阀芯的扇形进料开口朝向,通过扇形柱阀芯旋转不同角度打开不同进料口进行进料;进排水装置用于连接进排水管,对锅体内进行加水和对外排水,可实现进料、加水、清洗谷物、蒸煮以及自清洗功能,配以定时预约功能和手机远程控制功能可实现提前做饭的功能,最终实现,早起有饭吃,回家有饭吃,省去人们的做饭的时间,增加工作和休闲的时间。
附图说明
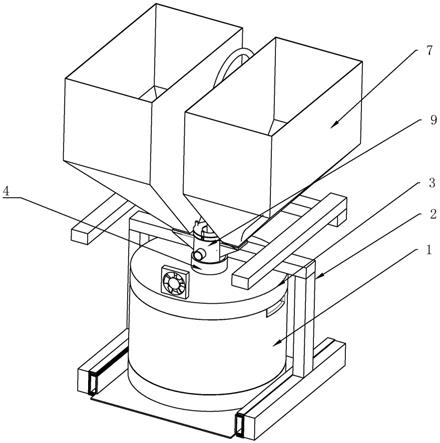
31.附图1为本发明立体结构示意图;
32.附图2为本发明隐藏一进料仓第二立体结构示意图;
33.附图3为本发明旋转搅拌模块结构示意图;
34.附图4为本发明扇形柱阀芯及扇形柱阀壳体横截面示意图;
35.附图5为本发明附图2中a处放大结构示意图。
36.附图中所示标号:1、锅体本体;2、支撑架;201、固定架;3、锅盖;4、套筒;5、进风口;6、进料口;7、进料仓;8、扇形柱阀芯;801、阀芯通孔;802、第一键槽;9、扇形柱阀壳体;10、空心轴;11、第一驱动电机;12、扇形进料开口;13、冷却风扇;14、底座;15、支撑臂;16、滚珠丝杠;17、螺母滑块;18、第二驱动电机;19、旋转接头;20、进排水管;21、搅拌叶;22、短键;23、接近开关ⅱ;24、金属块ⅱ;25、称重传感器;26、接近开关ⅰ;27、底座;28、金属块ⅰ;29、圆盘;。
具体实施方式
37.下面结合具体实施例,进一步阐述本发明,如图1~5所示,一种自动煮饭机器人及使用方法,包括蒸煮模块、进料模块、旋转搅拌模块、称重控制模块升降模块和进排水模块。
38.蒸煮模块包括锅体以及用于支撑锅体的支撑架2,锅体1上设有锅盖3,所述锅盖3上竖向固接有套筒4,套筒4与锅体1连通。
39.进料模块包括两个进料仓7,两个进料仓7分别与扇形柱阀壳体9的两个进料口6连通。
40.旋转搅拌模块包括扇形柱阀芯8、扇形柱阀壳体9、空心轴10以及驱动空心轴10的第一驱动电机11,扇形柱阀壳体9上设置有进风口5和两个进料口6;扇形柱阀芯8的横截面为扇形形状,扇形对应的圆心角大于180
°
,扇形柱阀芯8包括扇形进料开口,扇形柱阀壳体9与套筒4内壁通过键连接,扇形柱阀芯8设置在扇形柱阀壳体9内,阀芯通孔801内穿设有空心轴10,空心轴10上部设置有金属块ⅰ28以及与金属块ⅰ28相适配的接近开关ⅰ26,空心轴10的上部套设有圆盘29,圆盘29与空心轴10固接,金属块ⅰ28固设在圆盘29上,接近开关ⅰ26设置在金属块ⅰ28的上方,接近开关ⅰ26固设底座27上,底座27固设在第一驱动电机11壳体上,在空心轴10设置有接近开关ⅰ26,用于实现空心轴10的定位。
41.锅体为现有技术,可以实现加热蒸煮的功能,进料仓7为锥形结构,上宽下窄,便于谷物通过锅盖3上的套筒4滑落至锅体内,进料仓7设置为两个,位于锅体上方,每个进料仓7的出口分别与套筒4上的两个进料口6连通,根据需求,投放不同谷物进行蒸煮;扇形柱阀芯8的横截面的弧长为优弧,形成一个有劣弧缺口的扇形柱阀芯8,劣弧缺口的扇形柱阀芯8为扇形进料开口12,扇形柱阀芯8的弧形面紧贴套筒4的进风口5和两个进料口6,非工作状态扇形进料开口对应套筒4的进风口5,扇形柱阀芯8的优弧面阻隔进料口6落入谷物,根据需求,控制第二驱动电机18带动滚珠丝杠16的螺母滑块17向上移动,通过扇形柱阀芯8旋转不同角度打开不同进料口6进行进料;扇形柱阀芯8外壁设有弹性耐磨层,使扇形柱阀芯8与扇形柱阀壳体9之间形成弹性压力,用于密封进料口6。
42.锅体与支撑架2的下部滑接,打开锅盖3可将锅体本体1水平移动出锅,锅体与支撑架2的下部滑接通过滑轨完成,为现有技术,在此不做赘述,通过升降空心轴10带动锅盖3脱离锅体本体1,便于顺利移出锅体。
43.扇形柱阀芯8沿轴线开设有阀芯通孔801,阀芯通孔801与空心轴10相适配,阀芯通孔801上开设有第一键槽802,空心轴10的上部与第一驱动电机11连接且空心轴10的顶部连接有进排水管20,进排水管20连接有进排水装置,空心轴10的下端固接有搅拌叶21,空心轴10上固设有短键22,短键22与第一键槽802相适配,且短键22与金属块ⅰ28位于同一直线上,通过这样设置,金属块ⅰ28和短键22保持相同的角度位置,当金属块ⅰ28旋转至接近开关ⅰ26位置时,短键22和第一键槽802的位置相对应。
44.空心轴10的上部与第一驱动电机11内的输出轴通过旋转转接头连接,实现空心轴10的转动,进排水管20不转动的功能,进排水装置用于连接进排水管20,对锅体内进行加水和对外排水,设置空心轴10作为进水抽水的管道,能够省去在锅盖3上开口和部分给排水管道,进排水装置为现有技术,包括水泵和电控三通阀。
45.扇形柱阀芯8的上方设置有三个接近开关ⅱ23,扇形柱阀芯8的扇形面设置有金属块ⅱ24,接近开关ⅱ23与金属块ⅱ24相适配。
46.金属块ⅱ24和扇形柱阀芯8一起转动,三个接近开关ⅱ23设置在锅盖3上,分别与两个进料口6和进气口一一对应,接近开关ⅱ23不跟随扇形柱阀芯8转动,当扇形柱阀芯8带动金属块ⅱ24转动,靠近接近开关ⅱ23时,接近开关ⅱ23输出信号,信号发送至控制器,得出扇形柱阀芯8的扇形进料开口12朝向。
47.升降模块包括底座14、支撑臂15、滚珠丝杠16以及用于驱动滚珠丝杠16的螺杆旋转的第二驱动电机18,底座14固设在称重传感器25上,用于设置滚珠丝杠16,滚珠丝杠16的螺母滑块17一侧固接有第一驱动电机11,空心轴10的上部与第一驱动电机11的输出空心轴连接,第一驱动电机11用于带动空心轴10旋转,第二驱动电机18用于带动滚珠丝杠16的螺母滑块17上下移动,第一驱动电机11为空心轴减速机,第二驱动电机18为步进电机,步进电机在中低速时几乎为恒力矩,还可以实现精确的角度控制,控制器发出角度信号至步进电机,步进电机转动给定角度用于控制扇形柱阀芯8的转动,在进风口位置设置一个接近开关ⅱ23用于初始位置定位,左旋一定角度为左边的进料口6,右旋一定角度为右进料口,接近开关ⅱ23用于反馈扇形进料开口12的朝向。
48.称重控制模块包括称重传感器25,称重传感器25设置在支撑架2上端和固定架201下端,位于支撑架2和固定架201之间。
49.锅盖3上设置有冷却风扇13,冷却风扇13的排风口朝向进风口5,并从进排水管20排风,用于防止溢锅和冷却扇形柱阀8,避免造成扇形柱阀芯8温度过高导致进料口6附近谷物温度升高。
50.本发明的使用方法,通过金属块ⅰ28确定扇形进料开口12的朝向,控制第一驱动电机11,将空心轴10的短键22旋转至第一键槽802,控制第二驱动电机18带动滚珠丝杠16的螺母滑块17向上移动,进而带动空心轴10上移;空心轴10旋转带动扇形柱阀芯8的扇形进料开口12转至进料口6,通过对应的进料仓7投放谷物至锅体内,不同谷物通过控制扇形进料开口12转至不同进料口6进行投放并通过称重传感器25进行称重;进排水装置通过进排水管20进水,控制第二驱动电机18带动滚珠丝杠16的螺母滑块17向下移动,进而带动空心轴10下移至短键22脱离第一键槽802,通过控制第一驱动电机11带动空心轴10的搅拌叶21旋转,对谷物进行清洗,停止进水;通过控制进排水装置进行抽水,反复冲洗后,根据称重传感器25计算锅体内水的重量,控制进排水装置加水进行煮饭。
51.应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1