基于影像分析的自动清扫机器人的制作方法
1.本发明属于清扫机器人技术领域,特别是涉及一种基于影像分析的自动清扫机器人。
背景技术:
2.传统的清洁机器人在欧美韩日普及度非常高,在中国最近几年也以每年倍增的速度在普及,但传统的清洁机器人只是属于家用电器类别,真正的智能化无从谈起。相对传统清洁机器人,智能清洁机器人包括双模免碰撞感应系统、自救防卡死功能、自动充电、自主导航路径规划、配备广角摄像头(120
°
)、15组感应红外装置、加入路由wifi功能、可以通过手机app直接远程操控机器人、同时还能拍照视频分享,但针对学校走廊两侧瓷砖墙壁的清洁机器人相对较少,清洁大多还是采用人工,清洁效率较低。
3.目前针对学校走廊两侧瓷砖墙壁的清洁设备较少,由于瓷砖墙壁上粘黏的污秽不同,普通的清洁设备很难做到比较彻底的清洁,因而需要一种清洁效果更好的自动清扫机器人。
技术实现要素:
4.本发明的目的在于提供一种基于影像分析的自动清扫机器人,解决了现有的清洁设备针对不同污渍清洁效果难以满足需求的技术问题。
5.为达上述目的,本发明是通过以下技术方案实现的:
6.一种基于影像分析的自动清扫机器人,包括容纳箱,容纳箱周侧的四角处均开设有弧形槽,弧形槽的内部转动连接有转轴,转轴的周侧安装有转辊,四个转辊的周侧均装设有清扫组件;
7.储水槽,储水槽开设在容纳箱内侧的中部,容纳箱内侧的底部还开设有集水槽,集水槽的顶部安装有冲洗组件,四个弧形槽的底部均开设有与集水槽相连通的弧形槽口,转辊的周侧安装有喷洒组件;
8.移动机构,移动机构装设在容纳箱的底部,容纳箱的顶部安装有影像扫描机构,转辊上安装有用于固定清扫组件的限位组件。
9.可选的,容纳箱的内部开设有与四个弧形槽分别连通的四个内槽,内槽的内部安装有小型水泵,小型水泵的出水口连接有出水管,出水管与喷洒组件转动配合且连通,小型水泵的进水口连接有进水管,进水管的一端与储水槽底部连通。
10.可选的,转轴的内部开设有内腔,喷洒组件与内腔相连通,出水管与内腔相连通,容纳箱顶部的四角处还安装有四个电机,电机的输出端与转轴固定。
11.可选的,其一斜对角的两转辊周侧的清扫组件包括两个棉擦组件、两个刷板组件,另一斜对角的两转辊周侧的清扫组件包括两个刷板组件、两个刮除组件。
12.可选的,棉擦组件、刷板组件、刮除组件均包括弧形固定板,棉擦组件还包括安装在弧形固定板一侧的吸水棉擦,刷板组件还包括安装在弧形固定板一侧的刷板,刮除组件
包括开设在弧形固定板周侧的多个弧形直槽,弧形直槽内转动配合有单向辊,单向辊的周侧安装有多个软刮板。
13.可选的,喷洒组件包括均布安装在转辊周侧的多个导水管,导水管的一侧设置有多个喷水头,多个导水管与内腔之间连接且连通有连接管。
14.可选的,移动机构包括多个移动轮,移动轮为电动滚轮,影像扫描机构包括保护外壳、转动且滑动配合在保护外壳内的影像扫描仪。
15.可选的,容纳箱的内部开设有四个槽道,四个槽道分别位于四个弧形槽一侧,槽道内转动配合有挤压辊,挤压辊位于转辊一侧,冲洗组件包括安装在集水槽顶部的排水管、设置在排水管下侧的多个排水孔,排水管与储水槽之间连接且连通有下水管,下水管内设置有电动阀门。
16.可选的,限位组件包括l形柱、安装在转辊上的多边形柱、开设在l 形柱一侧的多边形槽、装设在多边形槽一侧的弹簧碰珠、开设在多边形柱一侧的与弹簧碰珠适配的半圆槽、开设在弧形固定板一侧的插口、开设在插口两侧的三角卡槽,多边形柱滑动配合在多边形槽内。
17.可选的,l形柱的内部开设有u形槽,u形槽内滑动配合有u形杆,u 形杆的两端均滑动配合有斜面块,斜面块的一端卡接在三角卡槽内,斜面块与u形槽一侧之间连接有弹簧,斜面块滑动配合在u形槽内,u形杆一侧安装有推杆,l形柱的一侧开设有滑槽,滑槽内滑动配合有按帽,推杆的一端与按帽内侧固定。
18.本发明的实施例具有以下有益效果:
19.1、通过设置带有棉擦组件、刷板组件、刮除组件三种组件的清扫组件,可以对校园瓷砖墙壁的不同污渍进行清扫清除,尤其设置的刮除组件,可以对粘黏在瓷砖墙壁上的顽固污渍进行刮除,并可利用单向辊来刮落刮除组件上的污渍,使用方便,且清洁效果好。
20.2、喷洒组件配合转动的转辊,可以将不仅可以对墙面喷洒清洁水源,还可以对弧形槽内进行喷洒清洗,进而使得装置可以边工作边实现自洁,同时挤压辊还可以挤压出棉擦组件内吸入的水渍,使得脏水可以被储存在集水槽内,方便后续集中处理,且该装置可以根据实际情况,来选择开启不同的清扫组件,不但节省能源,还减少了水源的浪费。
21.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
22.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
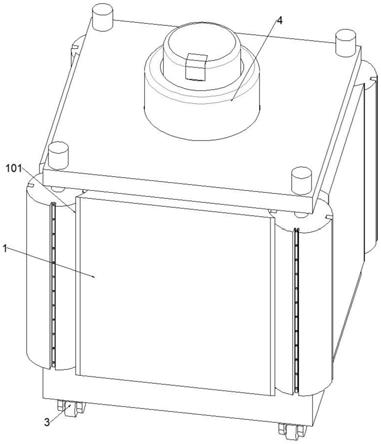
23.图1为本发明一实施例的立体结构示意图;
24.图2为本发明一实施例的立体上部结构示意图;
25.图3为本发明一实施例的侧视结构示意图;
26.图4为本发明一实施例的剖面结构示意图;
27.图5为图4的局部放大结构示意图;
28.图6为图5中a处结构示意图;
29.图7为本发明一实施例的棉擦组件及刷板组件结构示意图;
30.图8为本发明一实施例的刷板组件及刮除组件结构示意图;
31.图9为图8中b处结构示意图;
32.图10为本发明一实施例的喷洒组件结构示意图。
33.其中,上述附图包括以下附图标记:
34.容纳箱1,弧形槽101,储水槽102,集水槽103,内槽104,槽道105,转轴201,内腔202,转辊203,弧形固定板204,弧形直槽205,单向辊 206,软刮板207,刷板208,插口210,三角卡槽211,吸水棉擦212,移动轮3,保护外壳4,影像扫描仪401,排水管5,下水管501,小型水泵6,进水管601,出水管602,连接管7,导水管701,喷水头702,挤压辊8, l形柱9,多边形槽901,弹簧碰珠902,u形槽903,u形杆904,斜面块 905,弹簧906,按帽907,多边形柱10,半圆槽1001,电机11。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
36.为了保持本发明实施例的以下说明清楚且简明,本发明省略了已知功能和已知部件的详细说明。
37.请参阅图1
‑
10所示,在本实施例中提供了一种基于影像分析的自动清扫机器人,包括:容纳箱1,容纳箱1周侧的四角处均开设有弧形槽101,弧形槽101的内部转动连接有转轴201,转轴201的周侧安装有转辊203,四个转辊203的周侧均装设有清扫组件,该装置可以根据实际情况,来选择开启不同的清扫组件,不但节省能源,还减少了水源的浪费;
38.储水槽102,储水槽102开设在容纳箱1内侧的中部,容纳箱1内侧的底部还开设有集水槽103,容纳箱1的一侧开设有排水口,排水口与集水槽 103相连通,集水槽103的顶部安装有冲洗组件,四个弧形槽101的底部均开设有与集水槽103相连通的弧形槽口,转辊203的周侧安装有喷洒组件,喷洒组件配合转动的转辊,可以将不仅可以对墙面喷洒清洁水源,还可以对弧形槽内进行喷洒清洗;
39.移动机构,移动机构装设在容纳箱1的底部,容纳箱1的顶部安装有影像扫描机构,转辊203上安装有用于固定清扫组件的限位组件。
40.具体的:该清扫机器人在工作时,先启动影像扫描机构并随即移动至贴紧墙边,同时控制其一带有棉擦组件、刷板组件的转辊203转动,此时喷洒组件启动,使得清扫组件开始工作,当影像扫描机构扫描到有未清扫干净的区域时,则同时控制另一带有刮除组件、刷板组件的转辊203转动,进而继续对该未清扫干净的区域进行清扫,清扫结束后,清扫机器人移动到排水区域,并打开排水口,使集水槽内的脏水排出,此时电磁阀打开,水箱内的水源由下水管501流入到排水管5,进而由排水管5上的排水孔排出,对集水槽内进行冲洗;
41.需要说明的是水箱内可以添加清洁剂,以便于达到更好的清洁效果。
42.需要注意的是,本技术中所涉及的所有用电设备均可通过蓄电池供电或外接电源。
43.需要补充的是,弹簧碰珠902和影像扫描仪401均为现有技术,在此不再赘述。
44.为提高对喷出的水源的利用效果,故通过以下结构进行改善,请参阅图3
‑
5及图10
所示,本实施例的容纳箱1的内部开设有与四个弧形槽101 分别连通的四个内槽104,内槽104的内部安装有小型水泵6,小型水泵6 的出水口连接有出水管602,出水管602与喷洒组件转动配合且连通,小型水泵6的进水口连接有进水管601,进水管601的一端与储水槽102底部连通,转轴201的内部开设有内腔202,喷洒组件与内腔202相连通,出水管 602与内腔202相连通,容纳箱1顶部的四角处还安装有四个电机11,电机11的输出端与转轴201固定,喷洒组件包括均布安装在转辊203周侧的多个导水管701,导水管701的一侧设置有多个喷水头702,多个导水管701 与内腔202之间连接且连通有连接管7,在需要使用某个清扫组件时,可以控制电机11带动此清扫组件所属的转辊203转动,采用此方式,方便切换不同的清扫组件以应对不用的污渍,通过小型水泵6将储水槽102内的水源调入至内腔202、连接管7、导水管701,进而由喷水头702喷出,对待清扫墙面进行喷洒,进而方便清扫组件进行清理。
45.转轴201为中空结构,且中空结构的底部与出水管602转动配合且连通,使得小型水泵6可以将储水槽102内的水源均匀引入转轴201的中空结构内,且导水管701一侧的多个雾化喷水头702,可以将水源雾化均匀的喷出至墙面上,进而提高了清扫组件的清洁效果。
46.为增加对清扫组件的清扫效果,故通过以下结构进行改善,请参阅图 7
‑
10所示,本实施例的其一斜对角的两转辊203周侧的清扫组件包括两个棉擦组件、两个刷板组件,另一斜对角的两转辊203周侧的清扫组件包括两个刷板组件、两个刮除组件,棉擦组件、刷板组件、刮除组件均包括弧形固定板204,棉擦组件还包括安装在弧形固定板204一侧的吸水棉擦212,刷板组件还包括安装在弧形固定板204一侧的刷板208,刮除组件包括开设在弧形固定板204周侧的多个弧形直槽205,弧形直槽205内转动配合有单向辊206,单向辊206的周侧安装有多个软刮板207,设置的单向辊206,在清扫组件工作时,转辊203的转动不会带动单向辊206转动,进而使得单向辊206周侧的软刮板207可以随转辊203转动对墙面的污渍就进行刮除,刮除后转辊203反向转动,此时单向辊206受墙的压力也会开始转动,进而将软刮板207上粘着的软渍刮掉,进而实现快速的清洁工作。
47.需要说明的是,软刮板207的截面呈月牙形,且软刮板207尖端的硬度大于其另一端的硬度,且在单向辊206发生转动时,软刮板207会受到弧形直槽205的挤压而缩入弧形直槽205与单向辊206之间的夹缝中,且由于软刮板207的尖端硬度相对较大,可以更好的去除掉瓷砖上的顽固污渍,达到更好的清洁效果。
48.请参阅图1
‑
2所示,本实施例的移动机构包括多个移动轮3,移动轮3 为电动滚轮,影像扫描机构包括保护外壳4、转动且滑动配合在保护外壳4 内的影像扫描仪401,影像扫描仪401可以获取扫描的墙面是否未清除的污渍,进而可以控制并调整清扫组件进而二次清扫。
49.本实施例的四个转辊203,每斜对角的两转辊203装配的清扫组件相同,因而在其一转辊出现故障时,可以立即进行调整,使得该清扫机器人的清扫效果一直处于最优的状态,且每相邻两转辊203的清扫组件不相同,因而在清扫机器人在经过直角墙面时,可以使用机器人另一面的两转辊203 对墙面进行清扫,因而不仅省去了机器人自转切换转辊203所花费的时间,还减少了能耗。
50.影像扫描仪401还可以提前对墙面进行扫描,并对墙面的污渍分析,并根据分析结果来切换合适的清扫组件。
51.为方便对集水槽内进行清洗,故通过以下结构进行改善,请参阅图4 所示,本实施
例的容纳箱1的内部开设有四个槽道105,四个槽道105分别位于四个弧形槽101一侧,槽道105内转动配合有挤压辊8,挤压辊8位于转辊203一侧,冲洗组件包括安装在集水槽103顶部的排水管5、设置在排水管5下侧的多个排水孔,排水管5与储水槽102之间连接且连通有下水管501,下水管501内设置有电动阀门,在清扫结束后,清扫机器人移动到排水区域,并打开排水口,使集水槽内的脏水排出,此时电磁阀打开,水箱内的水源由下水管501流入到排水管5,进而由排水管5上的排水孔排出,对集水槽内进行冲洗。
52.为方便对磨损的清扫组件进行更换,故通过以下结构进行改善,请参阅图5
‑
6所示,限位组件包括l形柱9、安装在转辊203上的多边形柱10、开设在l形柱9一侧的多边形槽901、装设在多边形槽901一侧的弹簧碰珠 902、开设在多边形柱10一侧的与弹簧碰珠902适配的半圆槽1001、开设在弧形固定板204一侧的插口210、开设在插口210两侧的三角卡槽211,多边形柱10滑动配合在多边形槽901内,l形柱9的内部开设有u形槽903, u形槽903内滑动配合有u形杆904,u形杆904的两端均滑动配合有斜面块905,斜面块905的一端卡接在三角卡槽211内,斜面块905与u形槽 903一侧之间连接有弹簧906,斜面块905滑动配合在u形槽903内,u形杆904一侧安装有推杆,l形柱9的一侧开设有滑槽,滑槽内滑动配合有按帽907,推杆的一端与按帽907内侧固定,需要解除限位组件对清扫组件的限位时,先按动按帽907,进而带动推杆及u形杆904移动,使u形杆904 推动斜面块905移动,使得斜面块905的斜面在三角卡槽211的斜面上滑动,进而使斜面块905滑出三角卡槽211,同时弹簧906被迫发生形变,此时拉起l形柱9,使弹簧碰珠902卡入到半圆槽1001内,此时l形柱9的一端也脱离了插口210,此时松开按帽907即可,需要进行限位时,先将l 形柱9按下,使l形柱9的一端重新插入插口210,斜面块905受弹簧906 的影响先发生形变再恢复初始状态,进而最终带动斜面块905卡入三角卡槽211,进而完成对清扫组件的限位,该方式操作简单,对清扫组件的拆装效率高,方便使用。
53.上述实施例可以相互结合。
54.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
55.在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1