基于地面的无人卫生维护载具以及改善卫生条件的方法与流程
1.本发明涉及一种基于地面的无人卫生维护载具、一种基于地面的无人卫生维护载具的协同作用的集群、以及一种用于尤其使用基于地面的无人卫生维护载具的协同作用的集群来改善比如飞机等运输载具的客舱中的卫生条件的方法。
2.尽管本发明适用于卫生实践或程序中涉及的任何类型的行为,但是将主要结合飞机上的专业卫生保健过程来进一步详细解释本发明和对应的基本概念和挑战。
背景技术:
3.旨在预防或最大限度减少传染病(比如covid-19)传播的卫生实践正变得越来越重要,无论是对于政府机构和监管机构,还是对于关注医疗保健状况以及客户和员工福祉的私营企业而言。
[0004][0005]
当在潜在的危险环境下执行任务时,部署机器和/或自主行动的机器人能够减轻人类面临的风险。在那些情况下可能有所帮助的技术辅助系统、比如外骨骼或自主的基于地面的无人载具(agv)通常是从现有技术中获知的。
[0006]
例如,jp h09-47413a披露了一种清洁机器人,该清洁机器人包括驱动轮或履带,以及用清洁剂或消毒剂擦拭地板的擦拭单元。文献cn 111265707a披露了一种自主移动机器人,该自主移动机器人具有移动底盘和安装在移动底盘上的几个消毒装置。文献us 2016/0271803 a1披露了一种具有uv发射消毒单元的移动机器人平台。
[0007]
因此,对于卫生措施的无人化、自动执行,尤其是为了维持客运载具上的卫生标准,从根本上需要灵活和适应性强的解决方案,这些解决方案可以在有限的空间内可靠且高效地实施。
技术实现要素:
[0008]
因此,本发明的目的之一是为技术辅助系统寻找改善尤其是在客运载具上的卫生条件的改善的解决方案。
[0009]
该目的和其他目的是通过一种具有权利要求1的特征的基于地面的无人卫生维护载具(ugv)、通过具有权利要求15的特征的一种基于地面的无人卫生维护载具(ugv)的集群、以及通过一种具有权利要求17 的特征的用于借助于一个或多个基于地面的无人卫生维护载具(ugv)来改善卫生条件的方法来实现。
[0010]
根据本发明的第一方面,一种基于地面的无人卫生维护载具(ugv) 包括壳体,所述壳体具有底板、顶板、以及大致垂直于所述底板的至少一个壳体侧壁。布置在所述壳体中的是至少一个轮驱动装置,该至少一个轮驱动装置联接到至少一个轮,特别是联接到万向轮。万向轮例如可以实现为麦克纳姆轮。至少一个轮布置在底板中的凹部中。ugv包括:多个传感器,该多个传感器用于感测ugv的环境;以及控制器,该控制器用于基于多个传感器的感测参数来进行ugv的自主定位、导航和防撞。ugv 进一步包括铰接机械臂,该铰接机械臂
安装在壳体的顶板上或穿过顶板,机械臂被配置成支撑至少一个卫生维护工具。ugv进一步包括至少一个载荷接纳元件,该至少一个载荷接纳元件联接到壳体侧壁并从壳体侧壁向外延伸。至少一个载荷接纳元件包括载荷支撑表面,该载荷支撑表面用于相对于竖直方向支撑卫生维护工具供应模块,该竖直方向横向于底板延伸。
[0011]
根据本发明的第二方面,基于地面的无人卫生维护载具(ugv)的集群包括根据本发明的第一方面所述的多个ugv,该多个ugv中的一个执行引导载具的角色,并且引导载具的控制器经由无线通信连接到多个 ugv的其余ugv的控制器、并且被设计成控制多个ugv的其余ugv 的移动。在本发明的意义内,“控制”还表示协调ugv的联合移动。
[0012]
根据本发明的第三方面,一种借助于一或多个基于地面的无人卫生维护载具,尤其通过使用例如根据本发明的第二方面的基于地面的无人卫生维护载具(ugv)的协同作用的集群来改善例如飞机的客舱中的卫生条件的方法包括以下步骤:为根据本发明的第一方面的至少一个ugv在铰接机械臂上配备至少一个卫生维护工具以及在载荷接纳元件上配备卫生维护工具供应模块;针对每个ugv,将配备的卫生维护工具与配备的卫生维护工具供应模块相连接;协调至少一个ugv的协同运动;以及使用配备的卫生维护工具来执行局部卫生维护操作。
[0013]
本发明的概念之一是使用具有万向移动性的自主行动的卫生维护载具,以便在卫生条件需要改善或维持在某一卫生水平的环境中(例如在飞机的客舱中)的不同点执行局部卫生维护操作。例如,当所有乘客在一个飞行航段之后下飞机时,在飞机的客舱中进行局部卫生维护操作可以有助于将卫生条件提高回被认为对于下一个飞行航段的其他乘客的安全重新登机是可接受的水平。
[0014]
由于ugv的低空载重量和紧凑的设计,ugv可以用于受限环境中,比如飞机中。ugv具有机动性极好的优点,因此可以为工作人员提供有价值的支持。此外,工作人员可能会部分或全部被ugv代替,从而减少工作人员暴露在潜在不卫生环境中的时间和程度。由于机械臂接口和工具接口的模块化实施,可以自适应和高度灵活的方式使ugv适合于非常广泛的卫生维护操作。因此,也可能基于这种ugv来实施单个卫生维护系统,作为在机场的用于多种不同类型的飞机的地面服务系统。这允许卫生维护的技术援助系统的实施具有成本效益。
[0015]
有利地,可以卫生维护工具供应模块本身(即,例如蓄电池、uv照明装置和/或消毒剂箱)用作稳定框架的方式来构建ugv。由于这种卫生维护工具供应模块通常非常重,这使得ugv能够具有轻而紧凑的构造,同时仍保持已装载的ugv整体的重心低。
[0016]
在另一有利实施例中,卫生维护工具供应的载荷,比如卫生维护所需的全部液体消毒剂的量或电能储存装置的容量,可以分布在多个较小的卫生维护工具供应模块上。接着可以不仅经由ugv的单个轮,而是经由多个轮,并且因此经由多个载荷施加点,将这些载荷传递到ugv在其上行驶的输送表面。这可以是有利的,尤其在输送表面对高载荷敏感的情况下。例如,载具(尤其是飞机)的底板不应承受过大的载荷。因此,有利地减少了每单位面积的载荷,尤其在规定了特定阈值时或者在设置了特定敏感输送表面时。例如,每单位面积的载荷可以降低到25kg/cm2或更低。当然,本发明不限于25kg/cm2的阈值。
[0017]
ugv可以基于无线通信协议在它们之间形成ad-hoc网络,使得ugv 的数目可以动态地增加或减小,而无需进行特定的修改,这取决于当前盛行的维护需求。由于设置了标准
化和协调的接口架构,因此不需要为此目的对ugv本身进行重新编程或专门修改。
[0018]
ugv的一大优点是,在小空间内提升大载荷时,它们具有很高的承载能力。由于集成的提升机构,结合载荷被侧向地接纳在壳体侧面的事实, ugv的重心可以保持非常低,使得铰接机械臂的范围可以较宽,而ugv 不会倾向于翻倒。
[0019]
有利的设计和实施例将通过另外的从属权利要求和通过参考附图进行的描述给出。
[0020]
根据根据本发明的ugv的一些实施例,至少一个载荷接纳元件可以基本上平行于底板延伸。例如,载荷接纳元件也可以基本上为板形。可选地,载荷接纳元件的载荷支撑表面可以是平面的。进一步可选地,载荷支撑表面也可以基本上平行于底板延伸。载荷接纳元件的其他形状或构造也是可能的。例如,载荷支撑表面可以是弯曲的,例如凹入以接纳管道或类似的v形类似物。
[0021]
根据根据本发明的ugv的一些实施例,至少一个载荷接纳元件可以联接到壳体侧壁,以便相对于底板,至少相对于竖直方向静止。可选地,载荷接纳元件可以联接到壳体侧壁,以便在所有方向上相对于底板静止。也就是说,当提升卫生维护工具供应模块时,载荷接纳元件相对于ugv 的壳体保持静止,而ugv的至少一个轮相对于底板偏转。
[0022]
根据根据本发明的ugv的一些实施例,至少一个载荷接纳元件可以可拆卸地联接到壳体侧壁。因此,例如可以具有不同形状的支撑表面的各种载荷接纳元件可以容易地联接到壳体侧壁。通常,壳体侧壁可以包括机械联接接口,该机械联接接口被配置成将至少一个载荷接纳元件可拆卸地联接到壳体侧壁。
[0023]
根据根据本发明的ugv的一些实施例,至少一个壳体侧壁可以具有至少一个t形轮廓或燕尾凹槽作为机械联接接口,机械联接接口平行于底板延伸,并且至少一个载荷接纳元件的t形轮廓或燕尾舌轨可以形状配合的方式接合在机械联接接口中。这种设计允许快速更换不同类型的载荷接纳元件,而无需特殊工具,这取决于要运输的卫生维护工具供应模块的类型和形状。由于载荷接纳元件接口的t形轮廓或燕尾结构,载荷接纳元件的承载能力特别高。
[0024]
根据根据本发明的ugv的一些另外的实施例,具有电动工具连接部的工具载体可以布置在至少一个壳体侧壁中。在一些实施例中,在这种情况下,可电操作的吸盘可以联接到电动工具连接部。可电操作的吸盘可以应用于卫生维护工具供应模块的外壁,以防止卫生维护工具供应模块从载荷接纳元件滑落。
[0025]
根据本发明的ugv的另外的实施例可以配备有正好四个轮,这些轮联接到四个轮驱动装置并且布置在底板的凹部中。通过设置多于一个轮,可以有利地减小施加到轮在其上滚动的运输表面的压力。通过设置正好四个轮,可以实现ugv的高度稳定的支架和改善的牵引力。
[0026]
根据根据本发明的ugv的一些其他实施例,ugv的轮驱动装置可以包括至少一个轮悬架和至少一个提升马达。每个轮可以悬挂在一个轮悬架上,并且可以为每个轮设置至少一个提升马达或至少一个提升马达可以联接到每个轮。特别地,每个提升马达可以运动学方式联接到一个轮,以便使该轮相对于壳体在竖直方向上偏转。根据一些实施例,至少两个提升马达用于使轮悬架在垂直于底板的方向上相对于壳体偏转。一般来说,提升马达允许轮以受控方式延伸穿过底板中的凹部,以便将接纳有模块的壳体从底部升起。
[0027]
根据根据本发明的ugv的一些另外的实施例,轮悬架可以包括两个轮悬架臂,这两个轮悬架臂经由两个锯齿螺纹杆连接到壳体,这两个锯齿螺纹杆联接到两个提升马达。提升马达可以是例如步进马达,该步进马达可以经由锯齿螺纹杆来调整载荷的精确提升高度。替代性地,提升马达可以实现为例如伺服马达,或者通常实现为电动马达。锯齿螺纹是梯形螺纹,该梯形螺纹具有两个不同的侧面角,一面是30
°
到45
°
,另一面是0
°
到3
°
。当将这种锯齿螺纹装载在较平的螺纹侧面上时,这种锯齿螺纹可以吸收较大的力,并且尤其在这种情况下,对于用于在竖直方向上提升较重模块的提升机构(比如电能储存装置或液体消毒剂箱)特别有利。在竖直提升移动的情况下,更容易拆卸的缺点几乎没有任何意义。
[0028]
根据根据本发明的ugv的一些实施例,ugv可以包括至少两个轮和倾斜传感器,该倾斜传感器被配置成捕获底板相对于预定义参考方向的倾斜,其中控制器可以被配置成控制联接到轮的提升马达,使得底板相对于参考方向的倾斜保持在预定义范围内。参考方向例如可以是重力方向或垂直于ugv在其上驱动的运输表面的平坦区域的方向。通过基于所捕获的倾斜来控制提升马达,底板以及因此载荷接纳元件可以保持在期望的预定义取向。例如,预定义倾斜范围可以包含相对于参考方向为5度的角度范围。一般来说,控制ugv的倾斜使在运输表面的不平坦区域上移动变得容易,且防止ugv意外翻倒。
[0029]
根据根据本发明的ugv的一些另外的实施例,控制器可以具有无线通信模块,一个ugv的控制器可以经由该无线通信模块与另一个ugv 的控制器交换数据。多个ugv可以经由无线通信模块以协作的方式一起执行维护操作,因为在运输中涉及的一组ugv之间,可以可选地实时交换各个ugv的重要移动参数。例如,如果使用至少两个ugv,那么可以定义一个引导载具(“主载具”)和多个跟随载具(“从载具”)。可能地,也可以通过将各个ugv的系统时间与主ugv同步来实现协同操作模式,并且基于此,根据在应该执行卫生维护操作的区域内的预定义移动计划来为移动“定时”。在这种情况下,引导载具借助于与跟随载具的控制器的无线通信来控制跟随载具的移动。
[0030]
根据根据本发明的无人运输系统的一些实施例,可以设置包含充电接口的基站,其中ugv可以包括:电能储存装置,其例如用于操作提升马达、控制器、传感器等;以及ugv充电接口,其被配置成联接到基站的充电接口以对电能储装存置充电。可选地,基站的充电接口和ugv充电接口可以被配置成用于感应充电。例如,基站可以包括充电接口,该充电接口包含充电板和充电电感线圈,该充电电感线圈布置在充电板下面或集成到充电板中。ugv可以包括接收电感线圈,该接收电感线圈布置在壳体的底板上或集成到底板中ugv充电接口。为了充电,电能储存装置可以简单地行驶到基站的充电板上。因此,充电可以非常简单的方式自主进行。
[0031]
上述设计和实施例可以任何适当的方式相互组合。本发明的进一步可能的设计、实施例和实施方案还包含上文没有明确提到或者下文关于示例性实施例描述的本发明的特征的组合。特别地,本领域技术人员还将添加各个方面作为对本发明的相应基本形式的改善或添加。
附图说明
[0032]
下面基于示意图中给出的示例性实施例更详细地描述本发明。
[0033]
图1示出了根据本发明的一些实施例的基于地面的无人卫生维护载具的外部的示
意性透视图;
[0034]
图2示出了根据本发明的一些实施例的基于地面的无人卫生维护载具的外部的示意性透视图;
[0035]
图3示出了根据本发明的一些实施例的基于地面的无人卫生维护载具的内部存在的部件的示意图;
[0036]
图4示出了图3的基于地面的无人卫生维护载具在升高要运输的模块期间的两种操作状态的示意图;
[0037]
图5示出了根据本发明的一些实施例的基于地面的无人卫生维护载具的外部的示意性透视图;
[0038]
图6示出了根据本发明的实施例的基于地面的无人卫生维护载具的底板侧的示意性透视图;
[0039]
图7示出了图6的基于地面的无人卫生维护载具在升高和运输要运输的卫生维护工具供应模块期间的四种操作状态的示意图;
[0040]
图8示出了图6和图7中所示的基于地面的无人卫生维护载具的内部存在的部件;
[0041]
图9示出了根据本发明的进一步实施例的基于地面的无人卫生维护载具的外部的示意性透视图;
[0042]
图10示出了根据本发明的进一步实施例的基于地面的无人卫生维护载具的外部的示意性透视图;
[0043]
图11示出了根据本发明的进一步实施例的基于地面的无人卫生维护载具的外部的示意性透视图;
[0044]
图12示出了根据本发明的进一步实施例的基于地面的无人卫生维护载具的外部的示意性透视图;
[0045]
图13示出了根据本发明的一些实施例的基于地面的无人卫生维护载具的外部的示意性透视图;
[0046]
图14示出了根据本发明的一些实施例的基于地面的无人卫生维护载具的部件的分解图;
[0047]
图15示意性地展示了根据本发明的实施例的运输系统的功能框图;以及
[0048]
图16示意性地展示了根据本发明的实施例的基于地面的无人卫生维护载具的功能框图。
[0049]
附图旨在提供对本发明的实施例的进一步理解。附图展示了实施例,并用于结合描述来解释本发明的原理和概念。其他实施例和许多所陈述的优点从附图中来看是显而易见的。附图的元件不一定相对于彼此以真实比例示出。指示方向的术语,比如“顶部”、“底部”、“左”、“右”、“上方”、“下方”、“水平”、“竖直”、“前部”、“后部”、以及类似术语仅用于解释目的,并且不旨在将普遍性限于如附图所示的特定配置。
[0050]
在附图中,除非另有说明,否则相同的、功能上相同的以及以相同方式起作用的元件、特征和部件在每种情况下由相同的附图标记表示。
具体实施方式
[0051]
在本发明的意义内,无人卫生维护载具在这种情况下包含无人驾驶载具,无人驾
驶载具的目的是运输装载在载具上的卫生维护工具供应模块以执行局部卫生维护操作,基本上没有人的参与或干预地例如借助集成在运输载具中的用于定位、导航、障碍物检测和路径规划的传感器和软件来执行基于地面的移动操作,例如方向改变、加速或制动操纵。
[0052]
图1示出了基于地面的无人卫生维护载具(ugv)100的外部的示意性透视图。图3示出了存在于ugv 100内部的部件的示意图。图6到图8 示出了另外的ugv 1000,其中图6和图7示出了ugv 1000的外部的示意性透视图,并且图8示出了存在于ugv 1000内部的部件的示意图。图 16示出了ugv 100、1000的功能框图。
[0053]
如图16中示例性地示出,ugv 100、1000可以包括壳体1、1001;至少一个轮驱动装置10;至少一个轮13;控制器15;以及多个传感器s。可选地,也可以设置电能储存装置16和ugv充电接口120。ugv 100、 1000包括至少一个载荷接纳或载荷承载元件6,该至少一个载荷接纳或载荷承载元件被配置成支撑要运输的物品并且联接到ugv 100、1000的壳体1、1001。特别地,载荷接纳元件6可以可拆卸地联接到壳体,例如使得其在联接状态下相对于壳体1、1001静止。轮驱动装置10以运动学方式联接到至少一个轮13、130,并且被配置成驱动轮13、130,以便使ugv 100、1000在运输表面上移动。此外,轮驱动装置10可以被配置成使至少一个轮13、130偏转,使得壳体1、1001可以与载荷承载元件6一起被提升,以便提升由载荷接纳元件6支撑的物品。
[0054]
如从图16可以看出,轮驱动装置10可以包含至少一个轮悬架14和至少一个提升马达11。通常,每个轮13、130可以联接到单独的轮悬架,并且可以为每个轮13、130设置一或多个提升马达11。轮驱动装置10的操作可以由控制器15例如基于由传感器s捕获的传感器数据进行控制。控制器15、提升马达11以及(必要时)传感器s可以由电能储存装置16 供应电能,该电能储存装置可以例如为电池、蓄电池等。电能储存装置16 可以经由ugv充电接口120充电。
[0055]
控制器15可以包括例如asic、fpga或任何其他合适的计算构件或处理器。控制器15用于控制和监视ugv 100的轮驱动装置、传感器和其他电子或电气部件。
[0056]
传感器s可以例如包含热电传感器3,该热电传感器提供关于附近热源的信息并且因此可以用于保护ugv附近的工作人员。可以在ugv 100、 1000上的不同位置处以不同布置设置其他传感器,特别是用于捕获关于 ugv周围的信息的环境传感器,例如雷达传感器、超声波传感器、光学传感器、ir感器、激光传感器、激光雷达传感器或其他类型的传感器。不受通用性的限制,传感器2a和2b在图16中示出。进一步可选地,可以设置倾斜传感器8。有利地,用于环境感测的传感器也可以用于导航目的。例如,控制器15可以从环境传感器接收传感器数据,并且基于所捕获的传感器数据来控制轮驱动装置的操作。例如,在ugv在将由ugv执行卫生维护操作的区域内移动期间,传感器可以捕获表示ugv附近的表面和物体相对于卫生水平的污染或清洁度的信息。
[0057]
ugv 100、1000可以单独使用或者与至少一个另外的ugv 100、1000 组合使用以执行卫生维护任务。由于每个ugv 100、1000均包括传感器s,所以每个ugv 100、1000均可以进行自主导航。当与其他ugv 100、1000 组合使用时,每个ugv 100、1000可以配备有单独的载荷接纳元件6,以便容易地与要运输的卫生维护工具供应模块的接口联接。当然,所有的 ugv 100、1000也可以配备有相同类型的载荷接纳元件6。可选地,由 ugv 100、1000捕获的传感器信息可以在ugv 100、1000之间共享,这些ugv例如经由控制器15的无线通信模块15a
协作地分担卫生维护任务中的工作量。
[0058]
由于ugv 100、1000出色的机动性,例如,由于采用了万向轮13、 130,该ugv可以容易地在飞机的客舱内在座位排之间进行导航。类似地,ugv 100、1000可以用于在其他运输载具内执行卫生维护任务,比如轮船、火车或公共汽车。当然,ugv 100、1000的其他使用情况也是可能的。例如,ugv 100、1000可以在室内环境中执行卫生维护任务,比如在仓库、超市、办公室、实验室、医院中等,或者在室外环境中执行卫生维护任务,比如机场、火车站、港口、矿山等。
[0059]
如图1到图4中示例性地示出,ugv 100基本上包括壳体1,该壳体具有底板1c、与底板1c相反的顶板、以及大致垂直于底板1c的至少一个壳体侧壁1a。壳体1可以具有例如大致盒状的结构,在其他侧面上,即在完成壳体1以为内部部件形成封闭围封的侧壁上可能具有圆角。特别地,顶板可以不是完全平坦的,而是可以具有弯曲的或部分阶梯状的或波纹状的表面。在底板1c的凹部1d中布置有轮13,该轮例如借助于具有两个悬架臂14a、14b的轮悬架14悬挂在ugv 100内。
[0060]
轮13可以是例如万向轮,例如所谓的麦克纳姆轮或伊隆轮,其具有多个桶形滚子,这些桶形滚子以相对于轮13的旋转主轴倾斜的角度可旋转地安装在轮13的圆周上。滚子提供与地面或运输表面的接触。滚子可以围绕倾斜的轴承轴自由旋转。轮13本身经由壳体1内的轮驱动装置10 以可变的旋转方向和可变的旋转速度驱动。
[0061]
然而,替代性地,为此目的,可以将轮13实现为具有可控旋转悬架的独立转向轮,以使轮运行轴垂直于地面旋转。例如,轮13可以作为驱动轮集成到行进/转弯模块中,除了驱动轮的旋转移动之外,该行进/转弯模块还允许额外的主动竖直轴旋转能力和对准。在这种情况下,轮驱动装置可以具有两个单独的驱动马达,其中一个驱动马达驱动行进/转弯模块的驱动轮,而另一个驱动马达执行驱动轮围绕竖直轴的对准。在各自的情况下,围绕轮运行轴和竖直轴旋转的能力是无限的,因此实现轮的连续移动而没有结束位置。替代性地,为了实施ugv 100的万向移动性,轮13 也可以实现为全侧轮,即实现为这样的轮,在该轮的主圆周表面上附接有多个辅助轮,该多个辅助轮的旋转轴与轮13的主旋转轴成直角。
[0062]
ugv 100可以包括用于环境感测的多个传感器。例如,附接到壳体1 顶部的可以是热电传感器3,该热电传感器提供关于附近热源的信息,并且因此可以用于保护ugv附近的工作人员。其他传感器,例如雷达传感器、超声波传感器、光学传感器、ir传感器、激光传感器、激光雷达传感器或其他类型的传感器可以在不同位置且以不同布置集成到ugv 100的壳体1中。不受通用性的限制,作为示例,将传感器2a和2b表示为在图1到图4中的ugv 100的不同侧壁上。在ugv 100中包括空气污染传感器是可能的。这种空气污染或空气质量传感器是监视周围区域中空气污染的存在(尤其用于检测和量化空气中的颗粒物)的装置。例如,空气质量传感器可以能够对ugv 100周围的空气进行采样,以便确定空气中病菌、病毒、细菌孢子和类似病原体或微生物的污染水平。
[0063]
ugv 100可以包括控制器15,该控制器用于基于多个传感器的感测参数来进行ugv 100的自主定位和导航。控制器15可以包括例如asic、 fpga或任何其他合适的计算构件或处理器。控制器15用于控制和监视 ugv 100的轮驱动装置、传感器和其他电子或电气部件。
[0064]
壳体侧壁1a中的在图1和图2中被示出为面向前方的一个壳体侧壁中,可以存在平行于底板1c延伸的一或多个凹槽5。这些凹槽5用于接纳一个或多个载荷接纳元件6。图1示
出了两个载荷接纳元件6a、6b,其各自表示向外突出的载荷接纳叉6a和6b。在图2中,仅示出了一个载荷接纳元件6,作为加宽的载荷接纳平台或板6c。载荷接纳元件6a、6b、6c 各自包括基本上平坦的支撑表面60,以便相对于垂直于底板1c延伸的竖直方向支撑物品。图12示例性地示出了从壳体侧壁1a向外突出的呈基本上楔形的部件6d的形式的载荷接纳元件6。楔形部件6d可以包括从壳体侧壁1a向外延伸并相对于该壳体侧壁倾斜的凹入弯曲支撑表面60。因此,楔形部件6d的支撑表面60被配置成相对于竖直方向支撑物品。可选地,除了楔形部件6d之外,配对物61也可以联接到壳体侧壁1a、1001a。如图12中示例性地示出,配对物61可以沿着壳体侧壁1a、1001a在竖直方向上延伸,并且包含与支撑表面60相对布置的凹入弯曲端部部段。通常, ugv 1、1001的至少一个载荷接纳元件6可以包括载荷支撑表面60,该载荷支撑表面用于相对于竖直方向支撑物品,该竖直方向横向于底板1c、 1001c延伸。
[0065]
如图1、图2和图12进一步所示,载荷接纳元件6a、6b、6c可以具有设置在载荷接纳表面60处的防滑特征,例如防滑材料62(图12)和/ 或槽形轮廓(图1和图2)。还可以使载荷接纳元件6相对于水平方向侧倾或倾斜。
[0066]
凹槽5可以是例如t形轮廓或燕尾凹槽,相应载荷接纳元件6a、6b、 6c的t形轮廓或燕尾舌轨可以形状配合的方式接合在该t形轮廓或燕尾凹槽中。为此,可以从外侧将舌轨推入凹槽5中。凹槽5可以平行于底板 1c延伸,并且与底板1c相距不同的距离,彼此平行,以使不同的载荷承载高度能够灵活地适应要运输的货物。一般来说,至少一个载荷接纳元件 6可拆卸地联接到壳体侧壁1a。特别地,至少一个载荷接纳元件6可以联接到壳体侧壁1a,以便相对于底板1c,至少相对于竖直方向静止。
[0067]
工具载体4a也可以布置在壳体侧壁1a中。可选地,工具载体4a可以具有电动工具连接部,即为了供应电力,该连接部可以经由电线连接到壳体1内部的电能储存装置16,例如电池或蓄电池。电能储存装置16还可以为ugv 100的其他电气和电子部件提供独立的电力供应。工具载体 4a可以例如通过以运动学方式联接到工具载体4a的载体提升马达(未示出)相对于底板1c在竖直方向上移动。
[0068]
各种各样的工具可以附接到工具连接部。例如,图2示出了电动操作的吸盘4b,该电动操作的吸盘连接到电动工具连接部。吸盘4b可以是例如真空吸盘,该真空吸盘靠在要运输的物品的平坦外表面上,并且使得能够借助于吸附表面与外表面之间的真空来改进卫生维护工具供应模块的操纵。图9示例性地示出了联接到工具载体4a的水平止动件4c,该止动件可以围绕在竖直方向上延伸的轴枢转。止动件4c可以用于相对于平行于底板1c、1001c的方向支撑要运输的物品。例如,图10示出了联接到工具载体4a的竖直止动件或夹持元件4d。夹持元件4d可以用于夹持在夹持元件4d与载荷接纳元件6的支撑表面60之间的物品。图11示例性地示出了磁体接口4e,该磁体接口联接到壳体侧壁1a、1001a。磁体接口4e 可以包括:载体板40,其机械地联接到侧壁1a、1000a;以及磁体装置41,特别地电磁体,其联接到工具载体4a。载体板40可以例如以与上文针对载荷接纳元件6描述相同的方式,借助于t形轮廓或燕尾凹槽5可拆卸地联接到侧壁1a、1001。磁体装置41可以机械地和/或电气地联接到工具载体4a。因此,可以启用磁体装置41,例如由工具载体4a向其供应电能,并且可选地,通过工具载体4a相对于载体板40移动,特别地,在竖直方向上移动。此外,例如,图12示出了要联接到工具载体4a的配对物62。工具的另外的示例可以包含操纵器,例如能够操纵物品(例如抓握和旋转物品)的操纵器臂。
[0069]
如图3和图4中示例性地示出,两个提升马达11可以设置在壳体1 内,以在物品已经装载到载荷接纳元件6上之后,能够将物品升高。这些提升马达11被配置成使轮悬架臂14a、14b在垂直于底板1c的方向上(即在竖直方向上)相对于壳体1偏转。例如,轮悬架臂14a、14b可以经由联接到两个提升马达11的两个锯齿螺纹杆12连接到壳体1,使得提升马达11可以使轮悬架臂14沿着锯齿螺纹杆12的路线向上或向下移位,并且因此使万向轮13从凹部1c缩回或伸出。提升马达11可以是电动马达,例如步进马达或伺服马达。图1到图4中示例性地示出的ugv 100包括正好一个轮13。为此轮13设置一个轮驱动装置10,该轮驱动装置包含一个轮悬架14和两个提升马达11。一般来说,同样对于设置多于一个轮的情况,轮驱动装置10可以对于每个轮包括至少一个轮悬架14以及对于每个轮包括至少一个提升马达11,其中每个提升马达11以运动学方式联接到一个轮,以便使该轮在竖直方向上相对于壳体1偏转。
[0070]
提升马达11的两种可能的操作状态在图4的情形(a)和(b)中进行表示,首先,在情形(a)中,轮悬架14位于锯齿螺纹杆12的上端,使得万向轮13完全或几乎完全容纳在壳体1内,即底板1c距底部的距离为零,或者至少非常小。在情形(b)中,在提升马达11致动后,轮悬架 14通过旋转移动沿着锯齿螺纹杆12向下移动,使得万向轮13移出凹部 1d,向下移出壳体1,并且因此整个壳体1从底部升高,直到达到完全提升高度。
[0071]
ugv 100的控制器15可以包含无线通信模块15a(图16),第一 ugv 100的控制器15可以经由该无线通信模块与第二ugv 100的控制器 15交换数据。特别地,不同的ugv 100可以各自被指定为引导载具(“主载具”)或跟随载具(“从载具”),使得引导载具的控制器15经由无线通信连接到跟随载具的控制器15,并且可以控制和监视跟随载具的移动。例如,由传感器s捕获的传感器数据可以经由无线通信模块15a在 ugv 100之间共享。
[0072]
在ugv的协同移动中,ugv 100中的一个可以承担引导载具的角色。引导载具的控制器15经由无线通信与其他ugv 100的控制器15通信,并且可以向跟随载具发出移动命令。
[0073]
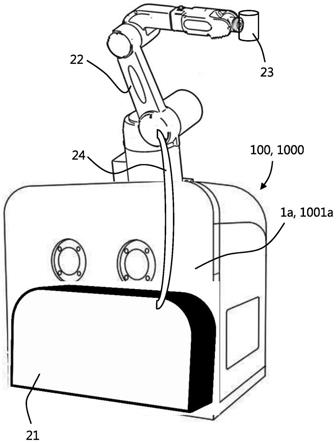
图5和图13示意性地示出了ugv 100、1000,该ugv具有安装在壳体1的顶板上的铰接机械臂。图5和图13中的ugv 100、1000可以具有如图1到图4或图6到图12中的任一者中所描绘的ugv 100或1000 的全部或至少一些性质和特性。图14中示出了图5和图13的实施例的示例性透视图。
[0074]
图5和图13中的ugv 100、1000包含铰接机械臂22、52,该铰接机械臂安装在壳体的顶板的顶部或穿过壳体的顶板的顶部。如图所示,铰接机械臂22、52可以是包含旋转关节的机器人,这些旋转关节通常被称为轴。铰接机械臂22、52可以是例如双轴结构,或者可以是具有三个或更多个轴的更复杂的结构。铰接机械臂22、52可以由伺服马达供电。例如,铰接机械臂22、52可以具有六个轴,每个轴提供额外的自由度,即机械臂独立运动的可能性。轴可以例如布置成链,从而允许先前的链节点沿着机械臂结构支撑后续的节点。铰接机械臂22、52的结构可以在与壳体的顶板竖直对齐并包含第一转动关节的基座中开始。主机械臂主体可以通过此第一转动关节连接到基座。第二转动关节可以垂直于主机械臂主体延伸,从而将肩部部分连接到主机械臂主体。
[0075]
肩部部分在其端部包含第三平行转动关节,该第三平行转动关节可以用于将肩部部分附接到主机械臂主体。接着,可以在机械臂的端部使用额外的关节或轴来附接机器人手腕和末端执行器23、53。末端执行器23、 53可以用于附接比如消毒剂喷洒工具23或uv照
明单元53等卫生维护工具。
[0076]
机械臂22、52可以用其基座部分直接安装到壳体1的顶板。替代性地,可以将机械臂22、52的基座部分安装到ugv 100、1000的内部结构,并且在壳体的顶板中设置备用件,机械臂22、52的其余部分(尤其是主械臂主体)可以通过该备用件被引导到壳体1的外部。
[0077]
卫生维护工具供应模块21、51可以承载在壳体侧面的载荷接纳元件 6上。卫生维护工具供应模块例如可以是液体消毒剂箱21,该液体消毒剂箱可以借助于液体消毒剂供应管线24(比如塑料管或类似物)连接到机械臂22的末端执行器处的消毒剂喷洒工具23。在另一个示例中,卫生维护工具供应模块可以是电能供应模块51,该电能供应模块包含电池或蓄电池以及对应的供应电路系统以用于向机械臂52的末端执行器处的uv照明单元53供电。电能供应模块51可以借助于电源线54(比如电力电缆或类似物)连接到机械臂52的末端执行器处的uv照明单元53。
[0078]
在仅具有单个轮13或仅具有两个排成一行的轮13的ugv 100、1000 的情况下,两个或更多个ugv 100、1000有可能同时对接到单个卫生维护工具供应模块。例如,各自具有两个排成一行的轮13的两个ugv 100、 1000可以连接到单个卫生维护工具供应模块的相反侧,使得在两个ugv 100、1000的壳体1侧面的载荷接纳元件6可以通过从相反侧支撑单个卫生维护工具供应模块来一起承载该单个卫生维护工具供应模块。这样,卫生维护工具供应模块可以承载在两个ugv 100、1000之间的中间,从而平衡所得载具的重心。以类似的方式,各自仅具有单个轮的四个ugv 100、1000可以从不同侧连接到单个卫生维护工具供应模块,使得四个ugv 100、1000的复合载具承载平衡在中间的单个卫生维护工具供应模块。
[0079]
如图13所示,ugv 100、1000可以另外配备有多个另外的uv照明单元55,这些uv照明单元分布在壳体的周围和表面处。那些另外的uv 照明单元55可以与机械臂52的末端执行器处的uv照明单元53一起,用于用能够杀死如病菌、病毒、细菌或类似微生物等有机颗粒物质或将其灭活的uv光尽可能有效且广泛地照射ugv 100、1000附近的一切。
[0080]
由于机动性和紧凑的体积,图5和图13的ugv 100、1000可以非常适合于出于执行卫生维护操作的目的进入飞机客舱的所有机舱区域。ugv 100、1000的过程自主性使得任何卫生维护过程可以自动进行,从而可以有利地在可能由于uv-c辐射或雾化消毒剂而对工作人员造成潜在危险的过程中省去工作人员。由于机械臂和载荷接纳元件的即插即用功能性,图 5和图13中的ugv 100、1000可以相当快速且容易地改变其配备的工具和供应模块。
[0081]
图6到图8示出了具有四个轮130的布置的ugv的实施例1000。ugv 1000在所有方向上的移动性源于ugv 1000具有四个特殊布置的麦克纳姆轮这个事实。还可能为ugv设置具有可以控旋转悬架的独立转向轮,以使轮运行轴垂直于地面旋转。一般来说,ugv 100可以包括四个万向轮。 ugv 1000的基本元件和操作模式基本上与结合图1到图5描述的ugv 100的相同,同样地设置壳体1001,该壳体具有底板1001c、顶板和大致垂直于底板1001c的至少一个壳体侧壁1001a。在其余的侧表面上,即在完成壳体1000以形成内部部件的封闭围封的侧壁上,壳体1000可以具有例如基本上盒状的结构,可能地具有圆角。布置在底板1001c的(一或多个)凹部1001d中的是四个轮130,这四个轮由ugv内的轮悬架14悬挂。这种设计例如在以下情况下是有利的:要承载的卫生维护工具供应模块的载荷不仅经由ugv的一个轮,而是经由多个轮,并且因此经由多个载荷施加点,传递到底部,例如飞机内的客舱的底部。
[0082]
在图7中,示出了轮130可以借助于提升马达降低或缩回。在这种情况下,可以将轮
布置在两个轴上,但也可以单独控制或升高和降低轮,例如借助于为每个轮设置的轮悬架14。图7示出了各种操作状态。因此,图 7在情形(a)中示出了缩回的轮130,图7在情形(b)中示出了轮130 伸出,并且图7的情形(c)和(d)示出了当另一个轴上的轮130伸出的同时,前轮或后轮130缩回。当经过地面的不平坦部分时,例如当经过门槛或缝隙时,轮130的这种轴向或轮向升高或提升可以为有利的。特别地,可以控制联接到轮的升降马达11,以保持底板1001c基本为水平。如图16中示意性地示出,ugv 1000可以包括倾斜传感器8,该倾斜传感器被配置成捕获底板1001c相对于预定义参考方向(即重力方向)的倾斜。例如,倾斜传感器8可以包含三个电子加速度传感器,该三个电子加速度传感器测量沿着三个垂直轴的加速度。ugv 1000的控制器15接收底板 1001c的测得或捕获到的倾斜度,并控制联接到轮130的提升马达11,使得底板1001a相对于参考方向的倾斜度保持在预定义范围内。可选地,当协同控制的ugv 1000的集群用于执行卫生维护操作时,ugv 1000可以向彼此传送其底板的倾斜度,并进一步传送其每个轮130的提升值,其中领航ugv的控制器15被配置成向该群ugv 1000的每个ugv 1000发出控制命令以控制每个ugv 1000的提升马达11。
[0083]
图8示出了ugv 1000内部的详细视图。在壳体1001内部,驱动机构或轮驱动装置10,以及升降机构或轮悬架(在图8中不可见)以紧凑的设计布置。还设置了能量储存装置,其使得ugv 1000能够独立移动。
[0084]
如上文已讨论的各种卫生维护工具和对应的卫生维护工具供应模块可以通过使用ugv的协同作用的集群的方法来运输。这种方法可以由上述所有类型的ugv 100、1000执行,而与轮13、130的数目无关。当使用具有多于一个轮130的ugv 1000时,至少两个ugv 1000,例如如图 5或图13中所表示并解释的ugv 100,在铰接机械臂22、52上配备有至少一个卫生维护工具,并且在载荷接纳元件6上配备有卫生维护工具供应模块21、51。接着,针对每个ugv 100;1000,所配备的卫生维护工具 22、52分别连接到所配备的卫生维护工具供应模块21、51。
[0085]
接着,协调至少两个ugv 100、1000的协同移动,以便能够使用该至少两个ugv 100、1000的所配备的卫生维护工具23、53来执行局部卫生维护操作。卫生维护工具供应模块以合适的方式放置在ugv 1000的载荷接纳元件6上,使得该模块可以通过ugv 1000的提升马达11以协调的移动升高。特别地,使轮13相对于底板1001c在竖直方向上偏转。这样升高的物品接着可以通过至少两个ugv 1000的万向轮130的协同控制来例如在飞机的客舱内移动,以执行局部卫生维护或改善操作,比如对客舱内的物体或客舱内的表面进行清洁、去污和/或消毒。
[0086]
例如,如上所述的方法可以借助于包含两个或更多个ugv 100、1000 的无人卫生维护系统uhms 200来执行。图15示意性地示出了uhms 200,该uhms包括四个ugv 100、1000和基站210。当然,可以设置其他多于或少于四个ugv 100、1000。ugv 100、1000可以如上所述进行配置。基站210可以包括电流源230、用于给ugv 100、1000充电的至少一个充电接口220、以及可选的工具更换器240。
[0087]
充电接口230可以包括:充电板221,ugv 100、1000可以行驶并停放到该充电板上;以及充电感应器线圈222,其布置在充电板221的下面或集成到充电板221中。充电接口220电连接到基站210的电流源230。可选地,可以设置控制器(未示出)来控制充电接口230的操作。
[0088]
ugv 100、1000可以包括ugv充电接口120,该ugv充电接口仅在图16中示意性示出。一般来说,ugv充电接口120被配置成连接到基站220的充电接口230。可选地,ugv充电接口120被配置成自主连接到基站220的充电接口230。例如,ugv充电接口120可以包括接收电感器线圈(未示出),该接收电感器线圈布置在壳体的底板1c、1001d上或集成到该底板中ugv充电接口120。为了给电能储存装置14充电,ugv可以简单地行驶到基站的充电板上。因此,充电可以非常简单的方式自主进行。
[0089]
可选的工具更换器220可以包含容纳各种工具的工具盒,各种工具例如吸盘4b(图2)、止动元件4c(图9)、夹持元件4d(图10)、磁体接口4e(图11)、配对物62(图12)等等。uhms 200的ugv 100、1000 可以自主行驶到工具更换器220,并将相应的工具联接到其工具载体。
[0090]
在前面的详细描述中,在一或多个示例中组合了各种特征,以提高呈现的严格性。然而,在这种情况下应该清楚的是,以上描述仅仅是说明性的,而决不是限制性的。以上描述用于涵盖各种特征和示例性实施例的所有替代、修改和等同物。对于本领域技术人员来说,由于他们的技术知识,在考虑以上描述之后,许多其他示例将是立即和直接显而易见的。
[0091]
已选择并描述了示例性实施例,以便最好地展示本发明的基本原理及其在实践中的可能应用。这使得专家能够就预期目的以最佳方式修改和使用本发明及其各种执行示例。在权利要求以及说明书中,术语“包含”和“具有”用作对应术语“包括”的中性语言术语。此外,术语“一个”的使用原则上无意排除多个这样描述的特征和部件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1