防摔幕墙机器人、用于幕墙机器人的防摔组件及防摔方法与流程
1.本发明涉及机器人技术领域,尤其涉及一种防摔幕墙机器人、用于幕墙机器人的防摔组件及防摔方法。
背景技术:
2.阻碍着幕墙机器人普及使用的很大一个难题为如何解决幕墙机器人作业时的意外坠落的问题,幕墙机器人的意外坠落问题除了容易造成人身安全事故以外,其最直接所导致的影响即为幕墙机器人自身的损坏。
3.基于目前的行业情况,幕墙机器人的造价高昂但实际单位时间收益较低,需要较长的工作时间才能回本,幕墙机器人的一次意外坠落事件很可能会导致产品报废,对经营者造成巨大的经济损失。
技术实现要素:
4.本发明提供了一种防摔幕墙机器人、用于幕墙机器人的防摔组件及防摔方法,该幕墙机器人在下摔前,能够抓稳幕墙,当抓稳失效后,启动减速应急,并且下落前开启气囊,使幕墙机器人安全着落。
5.本发明提供了一种用于幕墙机器人的防摔组件,包括防摔组件主体;
6.所述防摔组件主体包括壳体、中控装置、无线通讯装置、三向加速度获取装置、一体式吸盘气囊装置;
7.所述三向加速度获取装置具有加速度信号反馈端,所述无线通讯装置和所述加速度信号反馈端分别与所述中控装置信号连接;
8.所述一体式吸盘气囊装置包括固定部和弹出部;
9.所述壳体上设置有一柱形槽,所述固定部包括爆炸能量装置,所述爆炸能量装置的控制端与所述中控装置电性连接,所述爆炸能量装置设于所述柱形槽的底部;
10.所述弹出部包括吸盘、连接线、拉力传感器、微控制器和气囊,所述吸盘的尾部为导向柱,所述吸盘基于导向柱配合在所述柱形槽中;
11.所述微控制器和气囊固定在所述吸盘的背面上,所述连接线两端分别连接在所述导向柱和所述壳体之间,所述拉力传感器的信号端和所述气囊的控制端与所述微控制器信号连接;
12.所述拉力传感器用于获取所述连接线的拉力。
13.可选的实施方式,所述防摔组件主体还包括高压喷射装置,所述高压喷射装置外露于所述壳体;
14.所述高压喷射装置的控制端与所述中控装置信号连接。
15.可选的实施方式,所述防摔组件主体还包括流体开关装置;
16.所述流体开关装置具有流体输入端、流体输出端和开关信号反馈端,所述开关信号反馈端与所述中控装置信号连接。
17.可选的实施方式,所述防摔组件主体还包括二次保护气囊,所述二次保护气囊设置在所述壳体上;
18.所述二次保护气囊包括内置控制器、内置加速度传感器和二次气囊主体,所述二次气囊主体的控制端和所述内置加速度传感器分别与所述内置控制器信号连接。
19.相应的,本发明提供了一种幕墙机器人,包括机器人本体和若干个所述的防摔组件;
20.所述机器人本体的流体入口与所述流体开关装置的流体输出端连接。
21.相应的,本发明提供了一种用于幕墙机器人的防摔方法,包括主动式防摔方法:
22.所述主动式防摔方法包括:
23.基于三向加速度获取装置的实时加速度监测数据,所述实时加速度监测数据包括x轴方向加速度、y轴方向加速度和z轴方向加速度;
24.基于所述x轴方向加速度、y轴方向加速度和z轴方向加速度计算总加速度;
25.通过无线通讯装置上传所述总加速度;
26.中控装置基于无线通讯装置实时接收数据中心下发的控制指令;
27.在所述控制指令为失重前应急时,中控装置控制所述一体式吸盘气囊装置动作;
28.所述一体式吸盘气囊装置动作包括:
29.基于所述爆炸能量装置将所述弹出部推出;
30.微控制器启动并实时接收所述拉力传感器上传的拉力数据;
31.在所述拉力数据不满足预设条件时,所述微控制器控制所述气囊动作。
32.可选的实施方式,所述数据中心的控制指令基于以下方式产生:
33.所述数据中心具有学习数据库,所述学习数据库中的数据为关于所述幕墙机器人的加速度变化数据与所述幕墙机器人的行为对应函数;
34.所述幕墙机器人的行为包括正常和失重前;
35.在所述数据中心判断所述幕墙机器人的行为为失重前时,所述数据中心生成失重前应急指令并下发至所述幕墙机器人。
36.可选的实施方式,所述幕墙机器人的行为包括失重中;
37.在所述数据中心判断所述幕墙机器人的行为为失重中时,所述数据中心生成失重中应急指令并下发至所述幕墙机器人;
38.在所述控制指令为失重中应急时,所述中控装置控制高压喷射装置动作。
39.可选的实施方式,还包括被动式防摔方法:
40.所述被动式防摔方法包括:
41.在中控装置接收到流体开关装置的断流信号时,中控装置控制所述一体式吸盘气囊装置动作。
42.可选的实施方式,所述内置控制器实时接收所述内置加速度传感器的反馈数据,且在所述内置加速度传感器的反馈数据满足预设条件时,所述内置控制器控制所述二次气囊主体动作。
43.综上,本发明提供了一种防摔幕墙机器人、用于幕墙机器人的防摔组件及防摔方法,该防摔幕墙机器人、用于幕墙机器人的防摔组件及防摔方法利用加速度作为主动防摔的依据,利用防摔组件在防摔幕墙机器人发生坠落时的各个阶段进行相对应的防摔动作,
以避免幕墙机器人的损坏,降低幕墙机器人的损坏可能性。
附图说明
44.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
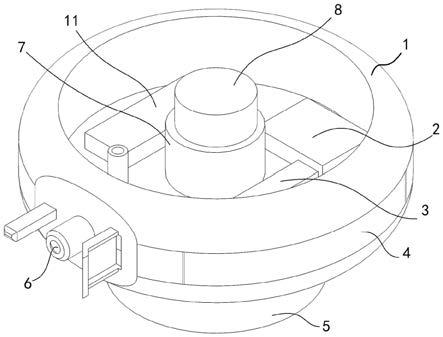
45.图1为本发明实施例的用于幕墙机器人的防摔组件三维结构示意图。
46.图2为本发明实施例的用于幕墙机器人的防摔组件的正视图。
47.图3为本发明实施例的幕墙机器人的防摔组件的电路连接结构示意图。
48.图4为本发明实施例的幕墙机器人的局部结构示意图。
49.图5为本发明实施例的用于幕墙机器人的防摔方法流程图。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
51.图1为本发明实施例的用于幕墙机器人的防摔组件三维结构示意图,图2为本发明实施例的用于幕墙机器人的防摔组件的正视图,其中,壳体1的一侧表面结构隐藏,以示出其内部结构。图3为本发明实施例的幕墙机器人的防摔组件的电路连接结构示意图
52.本发明提供了一种用于幕墙机器人21的防摔组件20,包括防摔组件20主体;具体的,防摔组件20主体是指实现防摔功能的主要配件结构,一般的,防摔组件20主体需要通过连接组件安装于幕墙机器人21的本体上。
53.所述防摔组件20主体包括壳体1、中控装置2、无线通讯装置3、三向加速度获取装置11、一体式吸盘气囊装置。
54.具体的,本发明实施例的壳体1上加工有一平面作为安装面,该安装面用于供壳体1固定在幕墙机器人21的本体上,具体的,该安装面上还设置有相对应的连接结构,连接结构的具体实施结构可参照现有技术。
55.具体的,所述三向加速度获取装置11具有加速度信号反馈端,所述无线通讯装置3和所述加速度信号反馈端分别与所述中控装置2信号连接;中控装置2分别用于与所述无线通讯装置3和所述加速度信号反馈端形成通讯以传输必要的信号。
56.所述一体式吸盘气囊装置包括固定部和弹出部;固定部是指一体式吸盘气囊装置中固定在壳体1上的结构,弹出部是指一体式吸盘气囊装置中在应急弹出时的结构。
57.具体的,所述壳体1上设置有一柱形槽7(盲孔槽),所述固定部包括爆炸能量装置,所述爆炸能量装置的控制端与所述中控装置2电性连接,所述爆炸能量装置设于所述柱形槽7的底部;在视图中由于遮挡,所述爆炸能量装置不可见;具体的,所述爆炸能量装置可以为微型高压气瓶、火药装置等用于在短时间内容产生较大能量的装置,以在必要时候将弹出部整体弹出。具体的,所述爆炸能量装置还可以与所述高压喷射装置8复用。
58.具体的,所述弹出部包括吸盘5、连接线、拉力传感器、微控制器10和气囊。
59.所述吸盘5的尾部为导向柱,所述吸盘5基于导向柱配合在所述柱形槽7中;具体的,所述导向柱采用具有一定弹性的材料制成,通过挤压的方式塞在所述柱形槽7中,在无外力的作用下不会掉落;同时,导向柱还起到了密封柱形槽7的作用,在爆炸能量装置动作时,能把能量尽可能的传递至导向柱上,避免能量的外泄,保证了吸盘5的弹出速度(冲击力)。
60.所述微控制器10和气囊9固定在所述吸盘5的背面上,所述连接线两端分别连接在所述导向柱和所述壳体1(柱形槽7的内部)之间,所述拉力传感器的信号端和所述气囊的控制端与所述微控制器10信号连接;具体的,拉力传感器可直接设置在连接线的一端上,连接线通过所述拉力传感器连接在所述导向柱或所述壳体1上。
61.所述拉力传感器用于获取所述连接线的拉力。
62.具体的,所述防摔组件20主体还包括高压喷射装置8,所述高压喷射装置8外露于所述壳体1;所述高压喷射装置8的控制端与所述中控装置2信号连接。所述高压喷射装置8主要是用于供幕墙机器人21掉落时提供一定的驱动力以调节幕墙机器人21的姿态。
63.具体的,所述防摔组件20主体还包括流体开关装置6;所述流体开关装置6具有流体输入端、流体输出端和开关信号反馈端,所述开关信号反馈端与所述中控装置2信号连接。具体的,流体开关装置6的作用是将供幕墙机器人21使用的流体(如气源、水源等)首先经过防摔组件20后再进入至幕墙机器人21的主体上,利用流体开关装置6对流体的有无进行监控,以判断幕墙机器人21是否脱离了正常工作状态发生坠落。
64.进一步的,所述防摔组件20主体还包括二次保护气囊4,所述二次保护气囊4设置在所述壳体1上;所述二次保护气囊4包括内置控制器、内置加速度传感器和二次气囊主体,所述二次气囊主体的控制端和所述内置加速度传感器分别与所述内置控制器信号连接。在幕墙机器人21坠落时,如幕墙机器人21坠落落地时不满足预设的速度姿态等条件,二次保护气囊4主要是进一步起到对幕墙机器人21进行保护的作用。
65.图4为本发明实施例的幕墙机器人21的局部结构示意图。
66.相应的,本发明提供了一种幕墙机器人21,包括机器人本体和若干个所述的防摔组件20;所述机器人本体的流体入口与所述流体开关装置6的流体输出端连接。
67.具体的,针对于现有的幕墙机器人21,可直接将若干个防摔组件20固定在幕墙机器人21上;针对具有流体开关装置6的防摔组件20,所述机器人本体的流体入口需要与所述流体开关装置6的流体输出端连接。
68.图5为本发明实施例的用于幕墙机器人21的防摔方法流程图。
69.相应的,本发明提供了一种用于幕墙机器人21的防摔方法,包括主动式防摔方法:
70.所述主动式防摔方法包括:
71.s101:基于三向加速度获取装置11的实时加速度监测数据;
72.所述实时加速度监测数据包括x轴方向加速度、y轴方向加速度和z轴方向加速度;
73.s102:基于所述x轴方向加速度、y轴方向加速度和z轴方向加速度计算总加速度;
74.需要说明的是,该总加速度包括加速度方向和加速度数值,具体的,防摔组件20的加速度即反应了幕墙机器人21的加速度,幕墙机器人21的加速度与其自身动作和自身姿态相关联。
75.s103:通过无线通讯装置3上传所述总加速度;
76.s104:中控装置2基于无线通讯装置3实时接收数据中心下发的控制指令;
77.具体的,防摔组件20基于下发的控制指令执行相应的动作。
78.具体的,所述数据中心的控制指令基于以下方式产生:
79.所述数据中心具有学习数据库,所述学习数据库中的数据为关于所述幕墙机器人21的加速度变化数据与所述幕墙机器人21的行为对应函数,即针对于不同的加速度变化,幕墙机器人21处于不同的状态行为。
80.例如,在幕墙机器人21正常工作时,其加速度变化数据与预设的加速度变化值一致,其加速度变化情况是与幕墙机器人21的正常工作时的动作变化相关联的,关于幕墙机器人21的正常工作时的加速度变化情况可采用模拟的方式从测试中得出。
81.若幕墙机器人21的加速度数据与其工作正常时的动作变化不一致,则表示幕墙机器人21处于非正常工作状态。
82.具体的,对于幕墙机器人21而言,基于加速度数据可获取的状态信息为幕墙机器人21坠落开始(在幕墙机器人21坠落前,机器人还在执行着相关的控制动作,但是由于机器人即将脱离所清洁的墙壁,其动作与正常工作时相比,加速度的变化幅度小于正常情况)、幕墙机器人21坠落中(在幕墙机器人21坠落时,由于整体脱离了所清洁的墙壁,加速度的变化规律完全不同于正常情况)、幕墙机器人21坠落碰撞(幕墙机器人21坠落于地面上的瞬间,加速度瞬间发生较大的变化)、幕墙机器人21坠落后(加速度归零或发生不同于正常情况的加速度);因此,针对于不同的幕墙机器人21动作,需要提供不同的应急措施。需要说明的是,幕墙机器人21在坠落过程中的每一个状态行为的加速度变化情况都需要根据具体款式的幕墙机器人21进行数据学习得到,本发明实施例仅是针对幕墙机器人21在坠落过程中的加速度变化情况进行概述性的描述。
83.s105:在所述控制指令为失重前应急时,中控装置2控制所述一体式吸盘气囊装置动作;
84.在所述控制指令为失重前应急时,具体的,中控装置2控制所述一体式吸盘气囊装置动作的过程包括基于所述爆炸能量装置将所述弹出部推出;微控制器10启动并实时接收所述拉力传感器上传的拉力数据;在所述拉力数据不满足预设条件时,所述微控制器10控制所述气囊动作。
85.弹出部弹出后,吸盘5朝对应方向射出,吸盘5基于连接线连接在壳体1(即幕墙机器人21的本体)上,若吸盘5能够成功吸附在墙壁上,则连接线的拉力数据会由于吸盘5提供了吸附力而增大到一定程度;若吸盘5没能够成功吸附在墙壁上,则连接线的拉力数据只会因为吸盘5的重力发生较小幅度的变化。
86.在吸盘5没能够成功吸附在墙壁上时,默认认定幕墙机器人21后续会产生坠落,为了防止幕墙机器人21直接摔落于底面上,所述微控制器10控制所述气囊动作,气囊会直接充气打开,以避免幕墙机器人21的本体与地面的直接撞击。
87.由于气囊设于吸盘5上,吸盘5则通过连接线连接于壳体1上,吸盘5与幕墙机器人21的本体之间具有足够大的空间供气囊膨胀,以对幕墙机器人21提供足够体积的缓冲保护。
88.需要说明的是,气囊的动作仅与连接线的拉力变化情况相关联,其动作不需要通
过远程通讯的方式实现,在实际实施中具有良好的应急性能。
89.s106:在所述控制指令为失重中应急时,所述中控装置2控制高压喷射装置8动作。
90.具体的,所述中控装置2控制高压喷射装置8动作是指利用高压喷射装置8喷射出流体以调节幕墙机器人21的下坠姿态,使其以更为安全的方式落地;多个高压喷射装置8的动作是联动的,需要根据实际设置方式进行调整。
91.进一步的,内置控制器实时接收所述内置加速度传感器的反馈数据,且在所述内置加速度传感器的反馈数据满足预设条件时,所述内置控制器控制所述二次气囊主体动作。具体的,内置控制器是指二次气囊中的控制器,幕墙机器人21在下坠时的最大加速度变化情况发生在幕墙机器人21与地面撞击的瞬间,若该加速度值太大时,表明幕墙机器人21与地面的撞击缓冲不够,这时候就需要二次气囊介入对幕墙机器人21进行进一步的撞击保护。
92.具体的,在主动式防摔方法意外,所述用于幕墙机器人21的防摔方法还包括被动式防摔方法:
93.所述被动式防摔方法包括:在中控装置2接收到流体开关装置6的断流信号时,中控装置2控制所述一体式吸盘气囊装置动作。具体的,幕墙机器人21的流体供给管道的长度是可控的,当幕墙机器人21下坠时,流体供给管道会脱出防摔组件20,导致防摔组件20上的流体开关装置6关闭,触发相应的流体开关装置6产生断流信号,在该情况下,中控装置2控制所述一体式吸盘气囊装置动作,以被动式的尝试防摔机器人的坠落。
94.综上,本发明实施例提供了一种防摔幕墙机器人、用于幕墙机器人的防摔组件及防摔方法,该防摔幕墙机器人、用于幕墙机器人的防摔组件及防摔方法利用加速度作为主动防摔的依据,利用防摔组件在防摔幕墙机器人发生坠落时的各个阶段进行相对应的防摔动作,以避免幕墙机器人的损坏,降低幕墙机器人的损坏可能性。
95.以上对本发明实施例所提供的防摔幕墙机器人、用于幕墙机器人的防摔组件及防摔方法进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1