清洗机内的污物情况判断方法、清洗机智能清洗方法及清洗机与流程
本发明涉及一种清洗机内的污物情况判断方法,应用该污物情况判断方法的清洗机的智能清洗方法,本发明还涉及一种清洗机。
背景技术:
1、清洗机为了保证清洗效果,通常会检测清洗机内的污浊程度,进而调整清洗机的清洗参数,进而提升清洗效果。现有技术中,普遍使用浊度传感器以用于检测清洗机中的污浊程度,进而根据浊度传感器的检测数据进行清洗控制。但是浊度传感器及与其配套使用的数据线成本高,并且浊度传感器对不同的污染物敏感程度不同,极易造成误判。另外在长期使用过程中,浊度传感器上也容易积累水垢,影响其检测精度。也有采用摄像头等装置实现清洗机内污物情况检测,摄像头使用时同样存在前述的问题,并且使用过程中计算量大,对控制芯片要求高,相应也提高了控制芯片的成本。
技术实现思路
1、本发明所要解决的第一个技术问题是针对上述现有技术提供一种仅采用清洗机工作中必要工作参数,无需专门设置用于采集清洗机内污物信息设备,即能准确实现清洗机内污物情况检测的清洗机内的污物情况判断方法。
2、本发明所要解决的第二个技术问题是针对上述现有技术提供一种应用前述清洗机内的污物情况判断方法,进而实现智能、有效清洗的清洗机的智能清洗方法。
3、本发明所要解决的第三个技术问题是针对上述现有技术提供一种应用前述清洗机内的污物情况判断方法和/或智能清洗方法的清洗机。
4、本发明解决上述第一个技术问题所采用的技术方案为:一种清洗机内的污物情况判断方法,其特征在于:清洗机进行一道清洗工作时,检测获取加热前清水冲洗状态下的电机功率n,检测获取加热后清洗状态下的电机功率数据p,比较p相对于n的变化情况,以及电机功率p随时间自身的波动情况,进而确定清洗机内的污物情况。
5、为了更准确的判断清洗机内的污物等级,计算加热前清水冲洗状态下的电机功率数据平均值作为未加热清洗阶段时的电机功率n;
6、在加热后清洗状态下,计算单位时间内的电机平均功率p0,同时获取该单位时长内对应的最大电机功率值pmax和最小电机功率值pmin;
7、计算n与p0之间差值相对于n的占比a,以及pmax与pmin之间差值相对于n的占比k,进而根据a和k确定清洗机内的污物等级。
8、本发明解决上述第二个技术问题所采用的技术方案为:一种清洗机的智能清洗方法,其特征在于:应用如前述的清洗机内的污物情况判断方法;
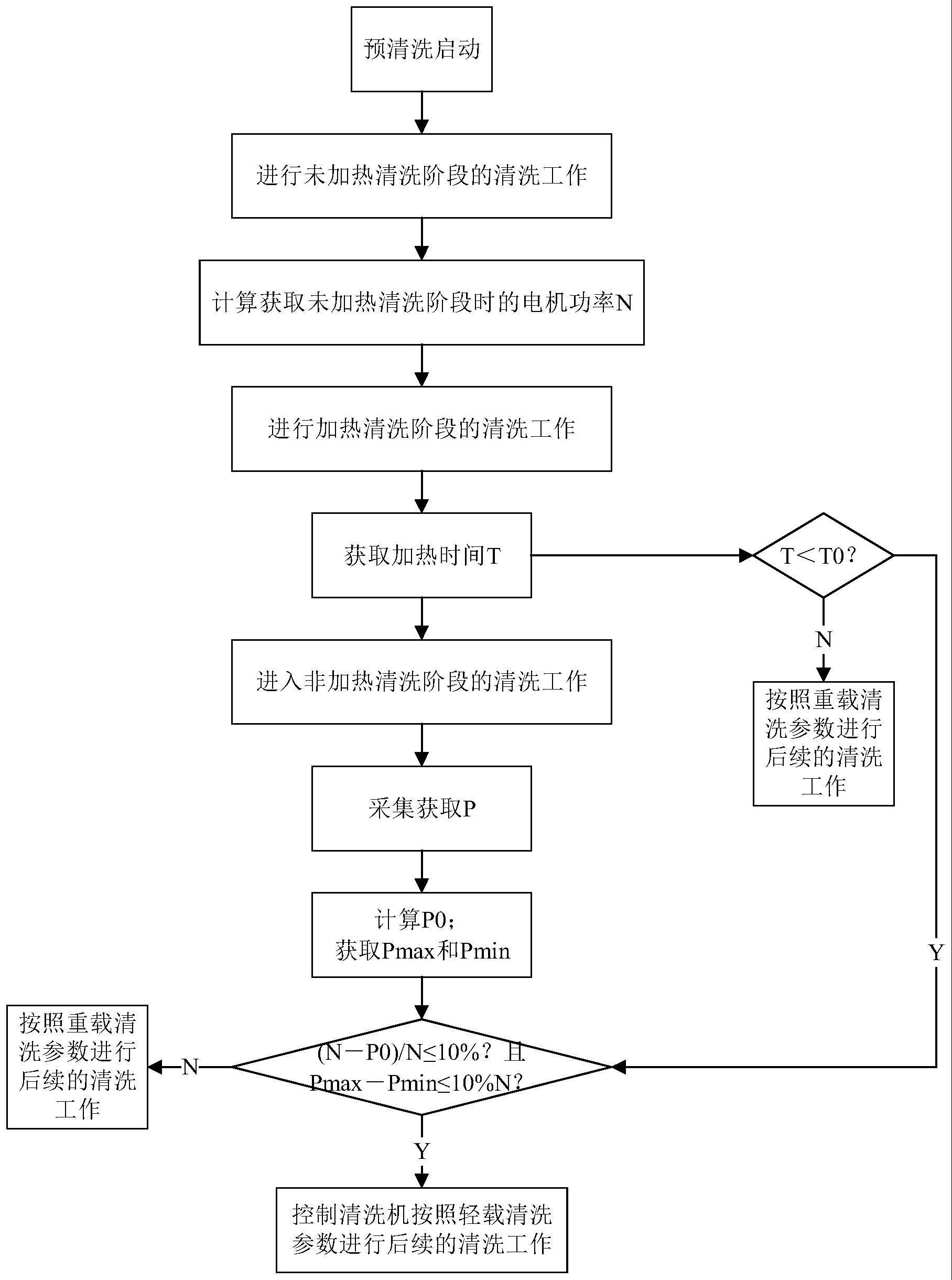
9、清洗机的一道清洗过程依次包括未加热清洗阶段、加热清洗阶段以及非加热清洗阶段;
10、清洗机进行一道清洗工作时,获取未加热清洗阶段时的电机功率n作为加热前清水冲洗状态下的电机功率n;
11、采集获取非加热清洗阶段的实时电机功率数据p作为加热后清洗状态下的电机功率数据p,比较p相对于n的变化情况,以及电机功率p随时间自身的波动情况,进而确定清洗机内的污物情况,并根据清洗内的污物情况确定清洗机后续清洗工作过程中的清洗参数。
12、作为进一步改进,计算未加热清洗阶段时的实时电机功率数据平均值作为未加热清洗阶段时的电机功率n;
13、根据实时采集的实时电机功率p计算单位时长内的电机平均功率p0,同时获取该单位时长内对应的最大电机功率值pmax和最小电机功率值pmin;
14、如果(n-p0)/n≤a,且pmax-pmin≤kn,则判断当前清洗机内的污物较少,进而确定对应的清洗参数为设定的轻载清洗参数;其中0<a<50%,0<k<50%。
15、作为进一步改进,清洗机进行一道清洗工作时,在加热清洗阶段实时采集清洗机内的水温数据,对水温加热至目标温度w0所需的加热时间t进行计时,根据t对非加热清洗阶段确定的清洗参数进行调整,然后根据调整后的清洗参数进行清洗机后续清洗工作。
16、为了针对不同的环境温度具有统一的判断标准,所述加热时间t采用水温自设定温度w1加热至目标温度w0所需的时间,其中w2<w1<w0,w2为清洗机使用地的最高环境温度。
17、作为改进,随着t的增大而提高清洗参数。
18、优选地,所述清洗机的清洗参数包括预设的轻载清洗参数和重载清洗参数,轻载清洗参数小于重载清洗参数;
19、将t与预设的时间阈值t0进行比较,仅在t<t0、(n-p0)/n≤a、且pmax-pmin≤kn的条件下控制清洗机按照轻载清洗参数进行后续的清洗工作,否则按照重载清洗参数进行后续的清洗工作。
20、本发明解决上述第三个技术问题所采用的技术方案为:一种清洗机,其特征在于:应用前述的清洗机内的污物情况判断方法和/或前述的智能清洗方法。
21、与现有技术相比,本发明的优点在于:本发明中的清洗机内的污物情况判断方法基于清洗过程中污物随着清洗而产生的性质变化的特点,进而由污物性质变化引起的清洗机中电机的功率变化,进而确定清洗机内的污物情况,该过程中,仅需要获取清洗机中工作必要工作参数,无需设置额外的检测器件进行污物情况的检测,成本低,且长期应用过程中,不存在其他因素对检测器件造成误差导致的检测误差,对清洗机内污物的判断情况一致性更好且更加准确。相应应用该清洗机内的污物情况判断方法的智能清洗方法,能够能够进行更加智能、有效的清洗工作,且清洗机的故障率低。应用该清洗机内的污物情况判断方法和/或智能清洗方法的清洗机,污物检测装置成本低且检测结果可靠性高。
技术特征:
1.一种清洗机内的污物情况判断方法,其特征在于:清洗机进行一道清洗工作时,检测获取加热前清水冲洗状态下的电机功率n,检测获取加热后清洗状态下的电机功率数据p,比较p相对于n的变化情况,以及电机功率p随时间自身的波动情况,进而确定清洗机内的污物情况。
2.根据权利要求1所述的清洗机内的污物情况判断方法,其特征在于:计算加热前清水冲洗状态下的电机功率数据平均值作为未加热清洗阶段时的电机功率n;
3.一种清洗机的智能清洗方法,其特征在于:应用如权利要求1或2所述的清洗机内的污物情况判断方法;
4.根据权利要求1所述的清洗机的智能清洗方法,其特征在于:计算未加热清洗阶段时的实时电机功率数据平均值作为未加热清洗阶段时的电机功率n;
5.根据权利要求4所述的清洗机的智能清洗方法,其特征在于:清洗机进行一道清洗工作时,在加热清洗阶段实时采集清洗机内的水温数据,对水温加热至目标温度w0所需的加热时间t进行计时,根据t对非加热清洗阶段确定的清洗参数进行调整,然后根据调整后的清洗参数进行清洗机后续清洗工作。
6.根据权利要求5所述的清洗机的智能清洗方法,其特征在于:所述加热时间t采用水温自设定温度w1加热至目标温度w0所需的时间,其中w2<w1<w0,w2为清洗机使用地的最高环境温度。
7.根据权利要求6所述的清洗机的智能清洗方法,其特征在于:随着t的增大而提高清洗参数。
8.根据权利要求6所述的清洗机的智能清洗方法,其特征在于:所述清洗机的清洗参数包括预设的轻载清洗参数和重载清洗参数,轻载清洗参数小于重载清洗参数;
9.一种清洗机,其特征在于:应用如权利要求1或2所述的清洗机内的污物情况判断方法和/或3至8任一项所述的智能清洗方法。
技术总结
本发明涉及一种清洗机内的污物情况判断方法,清洗机进行一道清洗工作时,检测获取加热前清水冲洗状态下的电机功率N,检测获取加热后清洗状态下的电机功率数据P,比较P相对于N的变化情况,以及电机功率P随时间自身的波动情况,进而确定清洗机内的污物情况。本发明还涉及一种清洗机的智能清洗方法,应用前述的污物情况判断方法,进而根据清洗内的污物情况确定清洗机后续清洗工作过程中的清洗参数。本发明还涉及应用清洗机内的污物情况判断方法和/或清洗机的智能清洗方法的清洗机。本发明中的方法及清洗机仅采用清洗机工作中必要工作参数,无需专门设置用于采集清洗机内污物信息设备,即能准确实现污物情况检测,清洗工作更加智能、有效。
技术研发人员:赵书瀚,郑峰,魏本柱,韩健健,张昌海,施郑赞,姜勇
受保护的技术使用者:宁波方太厨具有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!