一种基于柔性传感器和红外测距仪的坐姿矫正座椅
1.本实用新型涉及坐姿矫正技术领域,特别是一种基于柔性传感器和红外测距仪的坐姿矫正座椅。
背景技术:
2.随着社会现代化进程的不断发展,坐姿不正而导致的各类疾病正日渐低龄化,特别是青少年学习生活的压力负担加重,久坐行为已经不可避免,久坐时不会一直保持良好的姿态,还可能出现高低肩,脊柱侧弯,骨盆侧倾等体态问题,若长时间不纠正,会影响学生的健康和生长发育。
技术实现要素:
3.本实用新型所要解决的技术问题是针对现有技术的不足,提供一种能够有效辅助使用人员采用正确坐姿进行学习生活,避免因不良坐姿引起的各类不良疾病的基于柔性传感器和红外测距仪的坐姿矫正座椅。
4.本实用新型所要解决的技术问题是通过以下的技术方案来实现的。本实用新型是一种基于柔性传感器和红外测距仪的坐姿矫正座椅,该座椅包括坐垫和连接在坐垫一侧的靠背,在坐垫上固定安装有若干柔性压敏传感器,柔性压敏传感器呈矩形状的阵列分布在坐垫上,在靠背上安装有至少2个红外测距传感器,红外测距传感器通过调节支架安装在靠背上,在靠背的中部设置有与调节支架配合的调节槽,红外测距传感器固定安装在调节支架上,调节支架的一端插装在调节槽内,在调节槽的槽底固定连接有与调节支架固定连接的支撑弹簧,在调节槽上还旋接有用于对调节支架进行固定的固定螺栓,在靠近坐垫一侧的靠背上还设置有若干与调节槽连通的测距孔。
5.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的基于柔性传感器和红外测距仪的坐姿矫正座椅,在座椅上还固定安装有控制器,柔性压敏传感器、红外测距传感器均与控制器的输入端连接。
6.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的基于柔性传感器和红外测距仪的坐姿矫正座椅,控制器通过安装盒固定安装在座椅上,在安装盒上还安装有用于发出提醒信号的蜂鸣器,蜂鸣器与控制器的输出端连接。
7.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的基于柔性传感器和红外测距仪的坐姿矫正座椅,所述控制器为arm内核的微控制器中的stm32f103zet6单片机。
8.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的基于柔性传感器和红外测距仪的坐姿矫正座椅,所述柔性压敏传感器设置有256个,256个柔性压敏传感器按16行16列的矩形状阵列分布。
9.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的基于柔性传感器和红外测距仪的坐姿矫正座椅,所述红外测距传感器设置有2
个,2个红外测距传感器之间的距离为20cm
‑
50cm。
10.本实用新型所要解决的技术问题还可以通过以下的技术方案来进一步实现,对于以上所述的基于柔性传感器和红外测距仪的坐姿矫正座椅,所述调节支架包括长方体状的调节杆和活动套装在调节杆上的固定块,在固定块上设置有与固定螺栓配合的固定孔。
11.与现有技术相比,本实用新型提高的座椅包括坐垫和靠背,在坐垫上安装有用于对使用人员左右倾进行判断的柔性压敏传感器,在靠背上安装有用于对使用人员前后倾进行判断的红外测距传感器,便于及时了解使用人员的坐姿,在使用人员坐姿不正确时,可以及时提醒使用人员调整坐姿,避免因不良坐姿引起的各类不良疾病;其次,红外测距传感器通过调节支架安装在靠背上,能够适应不同身高的使用者,增加判断的准确性。该座椅设计合理、实用方便,能够对使用人员的坐姿进行实时监控,在使用人员坐姿不正确时,可以及时提醒使用人员调整坐姿,避免因不良坐姿引起的各类不良疾病。
附图说明
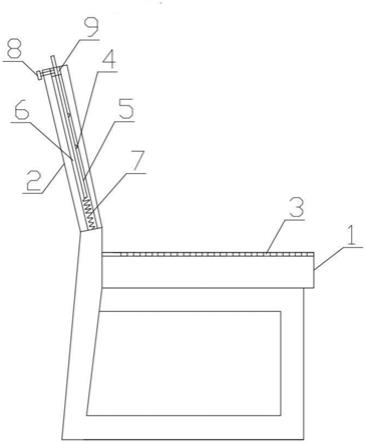
12.图1为本实用新型的一种结构示意图;
13.图2为本实用新型红外测距传感器的安装示意图;
14.图3为本实用新型的原理图;
15.图4为本实用新型左右倾判断程序框图;
16.图5为本实用新型前后倾判断程序框图。
具体实施方式
17.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.参照图1
‑
5,一种基于柔性传感器和红外测距仪的坐姿矫正座椅,该座椅包括坐垫1和连接在坐垫1一侧的靠背2,在坐垫1上固定安装有若干柔性压敏传感器3,用于对坐垫1的受力分布情况进行测量,柔性压敏传感器3呈矩形状的阵列分布在坐垫1上,便于更好的对坐垫1各个地方的受力进行进行测量;在靠背2上安装有至少2个红外测距传感器4,用于对使用人员的后背与靠背2之间的距离进行测量;红外测距传感器4通过调节支架5安装在靠背2上,在靠背2的中部设置有与调节支架5配合的调节槽6,红外测距传感器4固定安装在调节支架5上,调节支架5的一端插装在调节槽6内,调节支架5能够在调节槽6内进行移动,便于对红外测距传感器4的位置进行调整,便于适应不同的使用人员;在调节槽6的槽底固定连接有与调节支架5 固定连接的支撑弹簧7,在调节槽6上还旋接有用于对调节支架5进行固定的固定螺栓8,支撑弹簧7用于与固定螺栓8配合,分别用于从两侧对调节支架 5进行固定,避免调节支架5发生晃动,影响红外测距传感器4的测量结果;在靠近坐垫1一侧的靠背2上还设置有若干与调节槽6连通的测距孔10,测距孔10设置有多个,便于与红外测距传感器4配合,方便红外测距传感器4 更好的对使用人员的后背与靠背2之间的距离进行测量。
19.柔性压敏传感器3采用的是压阻式柔性压力传感器,是基于压阻效应的传感器在外力作用下活性材料会变形,并间接改变内部导电材料的分布和接触状态,从而导致活性材料的电阻有规律变化,与电容式和压电式压力传感器相比,它们不需要复杂的传感器结构,且功耗较低,测试压力范围广,制造过程简单。
20.在座椅上还固定安装有控制器,柔性压敏传感器3、红外测距传感器4均与控制器的输入端连接,用于接收柔性压敏传感器3、红外测距传感器4的检测数据,并对得到的数据进行处理,求出前后倾判断结果和左右倾判断结果;其次还可设置上位机,如计算机,控制器将测量得到的数据和判断结构一起通过串口连接ch340芯片,由ch340芯片将串口信号转换为usb信号后传入上位机,由上位机的matlab接收并处理,利用matlab提供的设备控制工具箱与图形用户界面工具箱对串口通信与用户界面进行设计,接收到的柔性压敏传感器3传感器阵列数据在matab中经过处理后在ui上显示为热力图的形式,其他结果则直接显示在matlab设计的ui上,方便观察使用人员的坐姿情况。
21.控制器通过安装盒固定安装在座椅上,在安装盒上还安装有用于发出提醒信号的蜂鸣器,蜂鸣器与控制器的输出端连接。安装盒的设置,方便控制器的固定安装;蜂鸣器的设置,用于在控制器根据接收到的数据判断使用人员坐姿不正确时,发生报警信号,提醒使用人员调整坐姿。
22.所述控制器为arm内核的微控制器中的stm32f103zet6单片机,单片机电路中包括了必要的电源电路和通信电路,实时性强,能够很好的满足本技术的使用需求。
23.所述柔性压敏传感器3设置有256个,256个柔性压敏传感器3按16行 16列的矩形状阵列分布,每一个柔性压敏传感器3相互独立,分布在456mm 长357mm宽的长方形内,每一个柔性压敏传感器3的长宽均为25.1mm和 18.3mm。用于遍布到坐垫1上,更好的对坐垫1的受力情况进行检测,便于根据检测的受力数据判断使用人员是否出现左右倾的情况。
24.所述红外测距传感器4设置有2个,2个红外测距传感器4之间的距离为 20cm
‑
50cm。2个红外测距传感器4可根据相应使用人员的具体情况设计,以适应不同身高的使用者,对于成人使用时,距离可设计大一些,对于未成年人使用时,距离可设计小一些;优选的,2个红外测距传感器4之间的距离为 30cm。
25.所述调节支架5包括长方体状的调节杆和活动套装在调节杆上的固定块 9,在固定块9上设置有与固定螺栓8配合的固定孔。在固定块9上设置有与调节杆配合的套装孔,套装孔略大于调节杆,便于固定块9在调节杆上滑动,调节槽6和固定块9均呈长方体状,固定块9用于通过固定螺栓8固定在调节槽6的槽口处,既便于配合调节杆的固定,又便于对调节槽6的槽口进行密封。
26.本技术进行左右倾判断:
27.左右倾判断程序通过单片机控制adc运行扫描模式,使模拟开关对柔性压敏传感器3阵列的每一列进行扫描,并将数据进行保存,形成一个16
×
16 的压力矩阵,最后通过对矩阵进行计算处理,得出左右倾判断结果;正常坐姿时,身体处于端正状态,压力矩阵具有左右对称性;分别将压力矩阵的左边8列数据和右边8列数据进行求和,分别记作l和r,则左半部分和与右半部分和之差δ为
28.δ=l
‑
r
29.设置阈值为p,p为正数,将p与δ比较得出判断结果;
30.本技术进行前后倾判断:
31.前后倾判断程序以单片机为控制核心,采集两个红外测距传感器4的数据,通过对数据的计算分析,得出使用者背部倾斜角度来判定使用者是否为正确的坐姿,具体为:
32.单片机采集到的上红外测距传感器4测得距离和下红外测距传感器4测得距离分别记作x1和x2,上下红外测距传感器4之间的垂直距离为b,在安装调试时水平方向上两个红外测距传感器4之间有一定距离,记作y,y为正数,则为求得使用者的前倾角度,前倾距离a为
33.a=x1‑
x2‑
y
34.则求得的倾斜角度θ为
[0035][0036]
对θ的大小进行判断,假设前倾为正,设倾斜角度阈值为α,α为正数;当θ>α时,单片机判断坐姿为前倾;当θ<
‑
α时,单片机判断坐姿为后倾;当
‑
α≤θ≤α时,单片机判断坐姿为正常。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1