一种清洁机的制作方法
1.本实用新型涉及到地面清洁领域,具体涉及到一种清洁机。
背景技术:
2.现有清洁机一般主要用于在地面上行走来进行拖地清洁,清洁机上主要设置驱动轮来实现移动行走,在行走的过程带动清洁机上的拖布来实现对地面的清洁处理,虽然能够满足实现清洁机的拖地清洁效果,但是清洁机的整体结构较为复杂,为了简化清洁机的结构,部分清洁机通过设置旋转的拖布来进行拖地清洁并通过旋转的拖布来带动清洁机进行移动行走,主要将拖布设置为倾斜结构来实现通过拖布接触地面旋转时能够带动清洁机进行移动行走,但是该结构的清洁机因无驱动轮结构导致无法检测到清洁机移动行走的距离,清洁机无法进行按距离的大小来设定移动行走的路径,导致清洁机无法对室内进行准确的覆盖移动行走来提升清洁覆盖率。
技术实现要素:
3.本实用新型旨在至少在一定程度上解决上述相关技术中的技术问题之一。
4.为此,本实用新型的目的在于提供一种清洁机,主要解决现有的清洁机无法按距离来设定移动行走的路径导致的清洁机的移动覆盖率较低的问题。
5.本实用新型的实施方式提供了一种清洁机,清洁机包括机器主体,机器主体的底部上安装有两个呈并列分布布置结构的旋拖组件,旋拖组件设置为可贴合地面水平旋转运动的结构,且当两个旋拖组件贴合地面水平旋转时两个旋拖组件的底部端面均与地面之间形成不均衡的摩擦力来带动机器主体进行位移;机器主体的底部上设置有第一轮,第一轮设置为可接触地面旋转运动的结构;清洁机还包括检测模块,检测模块用于检测第一轮进行旋转运动的旋转速度。
6.前述的一种清洁机,第一轮位于两个旋拖组件之间的中部位置的前侧位置上;或第一轮的数量设置为两个且两个第一轮分别位于两个旋拖组件的一侧位置上。
7.前述的一种清洁机,当第一轮的数量设置为两个时两个第一轮分别位于两个旋拖组件的中心位置到机器主体的两侧面之间的位置区域内且位于两个旋拖组件的外侧。
8.前述的一种清洁机,第一轮设置有可相对地面旋转滚动的第一旋转部;或第一轮设置有可相对地面旋转滚动的第一旋转部和设置有可绕竖直方向水平旋转的第二旋转部;或第一轮上设置有可贴合地面全向旋转的球部。
9.前述的一种清洁机,检测模块包括第一件和第二件,当第一轮旋转运动时可使得第一件和第二件之间形成触动检测信号来检测第一轮的旋转速度。
10.前述的一种清洁机,第一件设置为磁铁且位于第一轮上可与第一轮同步旋转运动,第二件设置为霍尔元件且位于机器主体上,当第一轮旋转运动使得第一件和第二件的位置对应时可触动检测信号。
11.前述的一种清洁机,第一件和第二件均设置位于机器主体上,第一件设置为红外
发射器且第二件设置为红外接收器,且第一件和第二件的位置对应设置使得第二件可以接收到第一件发射出的红外信号,第一轮上设置有隔挡部且隔挡部可与第一轮同步旋转运动。
12.前述的一种清洁机,第一件设置为红外发射器且第二件设置为红外接收器,第一轮上设置有第一部和第二部,第一件和第二件设置为至少部分朝向第一部和第二部方向,第一部和第二部设置为相邻分布布置结构,且第一部上设置有黑颜色材质构成的黑色部,第二部上设置有白颜色材质构成的白色部。
13.前述的一种清洁机,机器主体上设置有压件,压件位于旋拖组件的上侧并设置为接触旋拖组件的一部分来形成压接结构使得当旋拖组件贴合地面时有不均衡的压力,且当旋拖组件贴合地面水平旋转时与地面之间形成不均衡的摩擦力。
14.前述的一种清洁机,压件位于两个旋拖组件之间的中部位置上且压件设置为同时接触两个旋拖组件的一部分来分别形成压接结构;或压件的数量设置为两个且两个压件分别位于两个旋拖组件的上侧并设置为分别接触两个旋拖组件的一部分来分别形成压接结构。
15.前述的一种清洁机,机器主体上设置有调节装置,调节装置设置为与压件相连使得调节装置可带动压件在竖直方向上移动进而可通过调节装置来调节压件对旋拖组件的压力大小。
16.前述的一种清洁机,旋拖组件包括旋转盘和旋拖布,旋拖布安装于旋转盘上且位于旋转盘的下侧,旋拖组件上设置有用于对接安装的第一磁吸部且机器主体上对应的位置设置有第二磁吸部,第一磁吸部和第二磁吸部可磁性吸合使得旋拖组件安装于机器主体上。
17.前述的一种清洁机,第一轮与机器主体之间设置有弹性件,第一轮通过弹性件对接安装于机器主体上使得第一轮可在竖直方向上进行浮动位移。
18.与现有技术相比,本实用新型具有如下有益效果:
19.本方案的清洁机设置两个呈并列分布布置结构的旋拖组件,并将旋拖组件设置为可水平旋转运动的结构,通过旋拖组件实现对地面的大面积、大摩擦力的拖地清洁效果。
20.本方案同时利用旋拖组件的底部端面均与地面之间形成不均衡的摩擦力来带动机器主体进行位移,实现清洁机上无需设置驱动轮即可实现清洁机进行位移行走,清洁机的整体结构简单。
21.本方案在清洁机上设置第一轮,并设置检测模块来实现对第一轮的旋转速度的检测,进而通过第一轮的旋转速度实现检测到清洁机位移行走的距离,并可以根据检测到的距离来控制清洁机进行移动行走的路径,实现提升对地面的移动行走清洁的覆盖率。
22.本方案的检测模块可以实现对第一轮的旋转速度实现有效的检测,进而实现对清洁机的移动行走距离进行检测,以便控制清洁机进行更高覆盖率的移动行走。
23.本方案通过设置压件来实现对旋拖组件施加压力的结构效果,形成旋拖组件贴合地面时有不均衡的压力,进而实现旋拖组件贴合地面水平旋转时形成有不均衡的摩擦力,不均衡的摩擦力实现带动清洁机进行移动行走,解决现有通过设置拖布倾斜结构来实现清洁机进行位移行走的结构下的拖布对地面的拖地效果差、驱动拖布旋转的电机容易损坏的问题。
24.本方案针对压件还设置调节装置,通过调节装置实现对压件上下移动的调节,实现调节压件对旋拖组件的压力的大小,进而实现不均衡的压力的可调节性,并通过不均衡的压力实现不均衡的摩擦力的可调节性,有利于通过调节压力来实现清洁机进行稳定地移动行走。
25.本方案的旋拖组件与机器主体之间通过磁性吸合的方式实现安装和拆卸,磁性吸合的方式方便用户安装和拆卸旋拖组件,且旋拖组件的安装稳定性和可靠性更高,不容易变形或卡住。
附图说明
26.图1为清洁机的底部示意及两个旋拖组件之间设置压件的整体结构示意图;
27.图2为清洁机上两个旋拖组件之间设置压件的侧部剖面示意图;
28.图3为清洁机的底部示意及两个旋拖组件上分别设置压件的整体结构示意图;
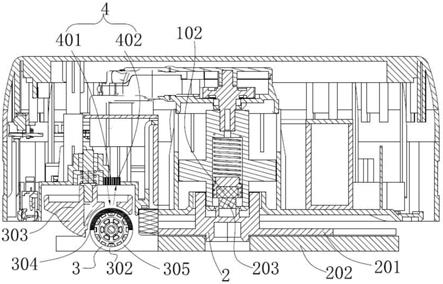
29.图4为清洁机上两个旋拖组件上分别设置压件的侧部剖面示意图;
30.图5为检测模块对第一轮进行检测的第一种方式;
31.图6为检测模块对第一轮进行检测的第二种方式;
32.图7为检测模块对第一轮进行检测的第三种方式;
33.图8为检测模块对第一轮进行检测的第四种方式;
34.附图标记:1
‑
机器主体,101
‑
压件,102
‑
第二磁吸部,2
‑
旋拖组件,201
‑
旋转盘,202
‑
旋拖布,203
‑
第一磁吸部,3
‑
第一轮,301
‑
隔挡部,302
‑
第一旋转部,303
‑
第二旋转部,304
‑
第一部,305
‑
第二部,306
‑
球部,4
‑
检测模块,401
‑
第一件,402
‑
第二件,5
‑
调节装置,501
‑
动力件。
具体实施方式
35.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本实用新型。
36.实施例:本实用新型的一种清洁机,如图1至图8构成所示,清洁机主要用于在地面上移动行走来实现对地面的清洁效果,同时清洁机上无需设置驱动轮结构,提供一种整体结构更简单且能够稳定移动行走的清洁机,同时清洁机可以具有对地面较高的覆盖率来实现取得较好的拖地清洁效果。
37.本方案的清洁机包括机器主体1,机器主体1的底部上安装有两个呈并列分布布置结构的旋拖组件2,旋拖组件2用于接触贴合地面来进行拖地清洁,主要为旋拖组件2设置为可贴合地面水平旋转运动的结构,且当两个旋拖组件2贴合地面水平旋转时两个旋拖组件2的底部端面均与地面之间形成不均衡的摩擦力来带动机器主体1进行位移;即为利用两个旋拖组件2贴合地面水平旋转产生的不均衡的摩擦力来作为清洁机移动行走的动力源,使得清洁机上无需设置驱动轮结构,清洁机的整体结构简单。
38.其中,机器主体1的底部上设置有第一轮3,第一轮3设置为可接触地面旋转运动的结构;清洁机在移动行走的过程中第一轮3接触地面来旋转运动,清洁机还包括检测模块4,检测模块4用于检测第一轮3进行旋转运动的旋转速度,检测模块4不仅可以来检测判断第一轮3是否处于旋转状态,还可以检测第一轮3的旋转速度,通过检测第一轮3的旋转速度进
而可以实现对清洁机的行走距离的判断,方便控制清洁机根据移动行走的距离来设定清洁机的移动行走模式,进而方便控制清洁机进行更高覆盖率的移动行走。
39.可选地,两个旋转组件的水平旋转方向设置为相反,有利于清洁机进行稳定地移动行走来完成拖地清洁任务。
40.第一轮3在清洁机上的位置设置,可以为第一轮3位于两个旋拖组件2之间的中部位置的前侧位置上,清洁机在移动行走的过程中第一轮3起到引导清洁机的移动行走方向;只需要满足第一轮3接触地面旋转运动即可。
41.或者,第一轮3的数量设置为两个且两个第一轮3分别位于两个旋拖组件2的一侧位置上,可以为两个第一轮3分别位于两个旋拖组件2的前侧位置或者前侧位置与靠近机器主体1两侧之间的区域位置上,实现两个第一轮3分别引导两个旋拖组件2的移动行走方向,同时有利于清洁机进行转弯移动行走,只需要满足两个第一轮3均能够接触地面旋转运动即可。
42.其中,当第一轮3的数量设置为两个时两个第一轮3分别位于两个旋拖组件2的中心位置到机器主体1的两侧面之间的位置区域内且位于两个旋拖组件2的外侧,即为两个第一轮3分别位于两个旋拖组件2的斜向外侧位置,此时有利于合理布置两个第一轮3和两个旋拖组件2之间的位置来使得清洁机的整体结构更紧凑,不会增大清洁机的外径尺寸也可以实现安装两个第一轮3,同时只需要确保两个第一轮3均能够接触地面旋转运动即可。
43.针对第一轮3的结构,可以理解地,本方案主要利用第一轮3接触地面旋转运动并通过检测模块4来实现对第一轮3的旋转速度进行检测而达到可以判断清洁机的移动距离的目的,因此第一轮3的结构可以为以下几种结构方式:
44.第一种结构方式为,第一轮3设置有可相对地面旋转滚动的第一旋转部302,可见第一轮3可以只设置可相对地面旋转滚动的第一旋转部302,通过检测第一旋转部302的旋转速度即可实现来判断清洁机的移动距离。
45.第二种结构方式为,第一轮3设置有可相对地面旋转滚动的第一旋转部302和设置有可绕竖直方向水平旋转的第二旋转部303,此时设置第二旋转部303有利于提升清洁机进行转弯移动,起到转弯移动过程中的引导导向效果;同时也可以实现通过检测第一旋转部302的旋转速度即可实现来判断清洁机的移动距离。
46.第三种结构方式为,第一轮3上设置有可贴合地面全向旋转的球部306,球部306可以实现贴合地面全向旋转,即为包括水平旋转和旋转滚动,此时有利于提升清洁机进行更加灵活的移动行走,同时也可以实现通过检测球部306在进行旋转滚动上的旋转速度即可实现来判断清洁机的移动距离。
47.上述三种结构的第一轮3均可贴合地面来进行旋转运动,旋转运动均至少包括贴合地面旋转滚动,通过检测模块4来检测第一轮3在旋转滚动中的旋转速度即可实现判断清洁机的移动行走距离。
48.针对检测模块4对第一轮3的旋转速度进行检测的部分,检测模块4包括第一件401和第二件402,当第一轮3旋转运动时可使得第一件401和第二件402之间形成触动检测信号来检测第一轮3的旋转速度,主要为第一轮3在旋转滚动时可以使得第一件401和第二件402之间形成触动检测信号,通过触动检测信号判断清洁机处于旋转滚动状态,也可以判断第一轮3的旋转速度;如第一轮3旋转滚动一圈对应的清洁机的移动行走距离,可以实现检测
模块4检测效果。
49.具体地,第一件401和第二件402的构成可以为以下几种方式;
50.第一种方式为,第一件401设置为红外发射器且第二件402设置为红外接收器,第一轮3上设置有第一部304和第二部305,第一件401和第二件402设置为至少部分朝向第一部304和第二部305方向,第一部304和第二部305设置为相邻分布布置结构,且第一部304上设置有黑颜色材质构成的黑色部,第二部305上设置有白颜色材质构成的白色部;此时第一件401和第二件402安装在机器主体1上,第一轮3可以设置在第一旋转部302上,因黑色不会反射红外信号,白色会对红外信号进行反射,因为可以通过黑色和白色交替相邻的结构来实现检测第一轮3的旋转速度;具体地,当第二件402不能接收到红外信号时则此时第一件401发射出的红外信号为发射到第一轮3的第一部304上即为黑色上;当第二件402能够接收到红外信号时则此时第一件401发射出的红外信号为发射到第一轮3的第二部305上即为白色上;即可实现检测模块4对第一轮3旋转速度的检测,进而来判断清洁机的移动行走距离。
51.第二种方式为,第一件401设置为磁铁且位于第一轮3上可与第一轮3同步旋转运动,主要为第一件401可位移第一轮3上来同步旋转滚动,第二件402设置为霍尔元件且位于机器主体1上,当第一轮3旋转运动使得第一件401和第二件402的位置对应时可触动检测信号,即为利用霍尔传感器的检测原理来实现对第一轮3的旋转速度的检测,第一件401可以设置位于第一旋转部302上,当第一轮3带动第一件401旋转滚动时,若第一件401的位置触动第二件402的检测信号则判断第一轮3处于旋转滚动状态,可以通过检测到第一件401的次数来判断第一轮3旋转滚动的圈数进而来判断其旋转速度,进而来判断清洁机的移动行走距离。
52.第三种方式为,第一件401和第二件402均设置位于机器主体1上,第一件401设置为红外发射器且第二件402设置为红外接收器,且第一件401和第二件402的位置对应设置使得第二件402可以接收到第一件401发射出的红外信号,第一轮3上设置有隔挡部301且隔挡部301可与第一轮3同步旋转运动;隔挡部301可以设置为第一旋转部302上,当第一轮3旋转滚动时则带动隔挡部301同步旋转滚动,当隔挡部301的位置位于第一件401和第二件402之间并形成隔挡结构时,此时第二件402无法接收到第一件401发射出的红外信号,则为隔挡部301对红外信号形成隔挡,可以通过检测到隔挡部301对红外信号隔挡的次数来判断其旋转速度,进而来判断清洁机的移动行走距离。
53.第四种方式为,第一轮3上设置有第一部304和第二部305,第一件401和第二件402设置为至少部分朝向第一部304和第二部305方向,第一部304和第二部305设置为相邻分布布置结构,且第一部304上设置有黑颜色材质构成的黑色部,第二部305上设置有白颜色材质构成的白色部;此时第一件401和第二件402安装在机器主体1上,第一轮3可以设置在球部306,因清洁机在进行前进或后退或转弯的过程中均会带动球部306进行旋转滚动,进而可以来针对球部306的旋转滚动的速度来进行检测,其中因黑色不会反射红外信号,白色会对红外信号进行反射,因为可以通过黑色和白色交替相邻的结构来实现检测第一轮3的旋转速度;具体地,当第二件402不能接收到红外信号时则此时第一件401发射出的红外信号为发射到第一轮3的第一部304上即为黑色上;当第二件402能够接收到红外信号时则此时第一件401发射出的红外信号为发射到第一轮3的第二部305上即为白色上;即可实现检测模块4对第一轮3旋转速度的检测,进而来判断清洁机的移动行走距离。
54.针对两个旋拖组件2上贴合地面水平旋转时形成有不均衡的摩擦力的结构部分,主要为两个旋拖组件2贴合地面时形成有不均衡的压力,在不均衡的压力的压接下使得两个旋拖组件2贴合地面水平旋转时能够形成不均衡的摩擦力,进而通过不均衡的摩擦力实现带动清洁机进行移动行走。
55.具体地,机器主体1上设置有压接101,压接101位于旋拖组件2的上侧并设置为接触旋拖组件2的一部分来形成压接结构使得当旋拖组件2贴合地面时有不均衡的压力,且当旋拖组件2贴合地面水平旋转时与地面之间形成不均衡的摩擦力;压接101主要为对旋拖组件2的局部的一部分形成压接结构,进而形成旋拖组件2在贴合地面是有不均衡的压力,在不均衡的压力下来形成旋拖组件2贴合地面水平旋转时有不均衡的摩擦力,进而通过不均衡的摩擦力来带动清洁机进移动行走;两个旋拖组件2上分别形成不均衡的压力来实现分别形成不均衡的摩擦力;实现两个旋拖组件2可以带动清洁机进行前进、后退或转弯移动行走。
56.针对压接101压接两个旋拖组件2的结构部分,可以有以下两种方式:
57.第一种方式为,压接101位于两个旋拖组件2之间的中部位置上且压接101设置为同时接触两个旋拖组件2的一部分来分别形成压接结构;即为单个压接101可以实现对两个旋拖组件2的一部分进行压接来形成两个旋拖组件2上均形成有不均衡的压力;此时压接101不仅可以实现两个旋拖组件2上形成不均衡的压力,还可以实现解决现有清洁机的两个旋拖组件2之间存在拖地漏缝的问题,现有清洁机主要为两个旋拖组件2之间为了避免相互干涉一般会设置一定的间隙,间隙会导致存在拖地清洁存在漏缝的问题无法形成单次移动行走清洁中的全面覆盖,导致清洁机的拖地清洁效果差,本方案的压接101可以解决拖地漏缝的问题。
58.第二种方式为,压接101的数量设置为两个且两个压接101分别位于两个旋拖组件2的上侧并设置为分别接触两个旋拖组件2的一部分来分别形成压接结构;即为两个旋拖组件2上分别设置有一个压接101,即为两个压接101来实现分别对两个旋拖组件2的压接效果,实现两个旋拖组件2上分别形成不均衡的压力,进而在贴合地面上时形成不均衡的摩擦力。
59.本方案中,压接101压接旋拖组件2的结构为压接101仅为压接旋拖组件2的一部分,即为局部的一部分,而不是平整的对整个旋拖组件2施加压力,压接101通过对旋拖组件2的局部位置进行施加压力才可以使得旋拖组件2贴合地面时形成不均衡的压力,进而实现旋拖组件2贴合地面水平旋转时能够形成不均衡的摩擦力,最终实现通过不均衡的摩擦力来带动清洁机进行移动行走。
60.为了实现压接101对旋拖组件2施加压力的可调节性,机器主体1上设置有调节装置5,调节装置5设置为与压接101相连使得调节装置5可带动压接101在竖直方向上移动进而可通过调节装置5来调节压接101对旋拖组件2的压力大小,通过调节装置5实现带动压接101的上下移动来调节压接101对旋拖组件2施加压力的大小;这样有利于根据清洁机移动行走的需要来对应设定施压压力的大小;如在清洁机在直线位移行走过程中出现偏移时则可以对应来条件旋拖组件2的压力使得清洁机的位移行走偏移状态被纠正回到直线方向前进或后退,有利于提升清洁机进行位移行走的可靠性和稳定性。
61.具体地,调节装置5包括动力件501,动力件501可以设置为电机,压接101与电机相
连,可以在电机上安装第一齿部,压接101上设置第二齿部,电机旋转带动第一齿部旋转进而带动第二齿部在竖直方向上上下移动,实现动力件501带动压接101上下移动的效果。
62.旋拖组件2的具体结构部分,旋拖组件2包括旋转盘201和旋拖布202,旋拖布202的外径或直径大于旋转盘201的外径或直接使得旋拖布202的外沿部分能够覆盖到旋转盘201的外沿部分,旋转盘201和旋拖布202可以均设置为柱形结构或盘形结构,并将旋拖布202安装于旋转盘201上且位于旋转盘201的下侧,旋转盘201与机器主体1之间相连,旋转盘201旋转可以带动旋拖布202同步旋转,主要为同步水平旋转的结构,旋拖组件2上设置有用于对接安装的第一磁吸部203且机器主体1上对应的位置设置有第二磁吸部102,第一磁吸部203和第二磁吸部102可磁性吸合使得旋拖组件2安装于机器主体1上,有利于通过磁性吸合的方式来实现对旋拖组件2的安装和拆卸,方便用户使用;现有的清洁机一般通过卡扣安装相连的方式,卡接安装相连的方式容易变形导致旋拖组件2在长时间下出现难以安装和拆卸的问题,严重影响用户使用体验。
63.具体地,第一磁吸部203安装在旋转盘201上,第二磁吸部102安装在机器主体1上且安装位置与第一磁吸部203的位置在竖直方向上对应,进而实现磁性吸合的拆装结构。
64.为了提到第一轮3接触地面旋转时可以越过地面上凸起的障碍物,本方案在第一轮3与机器主体1之间设置有弹性件,弹性件可以为弹簧或扭簧,第一轮3通过弹性件对接安装于机器主体1上使得第一轮3可在竖直方向上进行浮动位移,弹性件使得第一轮3在竖直方向上可以进行一定的上下浮动位移,当地面上有凸起的障碍物时,此时第一轮3可以向上缩回浮动来跨越障碍物实现清洁机可以越障位移行走,提升清洁机的位移行走能力。
65.工作原理:本方案的清洁机主要在地面上行走来进行完成拖地清洁任务,主要利用清洁机上的旋拖组件2来实现对地面的清洁效果,同时利用旋拖组件2水平旋转运动过程中与地面之间形成的不均衡的摩擦力来作为清洁机移动的动力源,实现清洁机上无需设置驱动轮;具体通过设置压接101来实现对旋拖组件2的一部分进行施加压力使得旋拖组件2贴合地面时有不均衡的压力,在不均衡的压力下进而形成不均衡的摩擦力;同时设置第一轮3来接触地面运动,通过检测模块4来检测第一轮3的旋转速度进而可以判断清洁机移动行走的距离,进而实现控制清洁机可以按照设定的距离来进行移动行走的路径,提升清洁机对地面的拖地清洁的覆盖率,
66.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围,均在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1