扫地机器人及扫地系统的制作方法
1.本公开属于机械技术领域,特别涉及一种扫地机器人及扫地系统。
背景技术:
2.扫地系统是一种用于清扫房间地面的机器装置,其由扫地机器人和集尘装置组成。
3.在相关技术中,扫地机器人主要包括尘盒组件和风机组件,尘盒组件具有相互连通的连接风口、吸尘风口和集尘风口,风机组件与尘盒组件相连,且风机组件与连接风口相连通。扫地机器人工作时,在风机组件的作用下,地面上的垃圾将由吸尘风口被吸入尘盒组件内部并储存。当尘盒组件内装满后,扫地机器人能够移动至集尘装置处,并通过集尘风口与集尘装置对接。在对接完毕后,集尘装置利用自身的风力将尘盒组件内的垃圾吸收过来并储存。
4.然而,由于吸尘风口和集尘风口连通,且吸尘风口与外界连通,所以集尘装置在通过自身的风力吸收尘盒组件内的垃圾时,无法很好的在尘盒组件内建立低压空间,导致吸收效果不理想。
技术实现要素:
5.为了解决上述技术问题,本公开的目的在于提供一种扫地机器人及扫地系统,能够提高集尘效果。
6.为了达到上述目的,本公开所采用的技术方案如下:
7.根据本公开的一个方面,提供了一种扫地机器人,包括尘盒组件和第一风机组件;
8.所述尘盒组件具有相互连通的第一尘盒风口和第二尘盒风口;
9.所述第一风机组件与所述尘盒组件相连,所述第一风机组件具有相互连通的第一风机风口和第二风机风口,所述第一风机风口与所述第一尘盒风口相连通;
10.所述第一风机组件被配置为,当所述第一风机组件正转时,气流方向为从所述尘盒组件至所述第一风机组件,当所述第一风机组件反转时,气流方向为从所述第一风机组件至所述尘盒组件。
11.在本公开的一种实现方式中,所述扫地机器人还包括第一翻板组件;
12.所述第一翻板组件位于所述尘盒组件内,且与所述尘盒组件相连,所述第一翻板组件位于所述第二尘盒风口处;
13.所述第一翻板组件被配置为,当所述第一风机组件正转时,所述第一翻板组件露出所述第二尘盒风口,当所述第一风机组件反转时,所述第一翻板组件封闭所述第二尘盒风口。
14.在本公开的另一种实现方式中,所述第一翻板组件包括第一板件和第一扭簧;
15.所述第一板件与所述尘盒组件相枢接;
16.所述第一扭簧的一个端脚与所述第一板件相连,所述第一扭簧的另一个端脚与所
述尘盒组件相连。
17.在本公开的又一种实现方式中,所述尘盒组件具有第三尘盒风口;
18.所述第三尘盒风口分别与所述第一尘盒风口和所述第二尘盒风口连通,所述第三尘盒风口用于与集尘装置连通;
19.所述扫地机器人还包括第二翻板组件;
20.所述第二翻板组件位于所述尘盒组件外,且与所述尘盒组件相连,所述第二翻板组件位于所述第三尘盒风口处;
21.当所述第一风机组件正转时,所述第二翻板组件封闭所述第三尘盒风口,当所述第一风机组件反转时,所述第二翻板组件露出所述第三尘盒风口。
22.在本公开的又一种实现方式中,所述第一尘盒风口与所述第二尘盒风口之间的距离,小于所述第一尘盒风口与所述第三尘盒风口之间的距离。
23.在本公开的又一种实现方式中,所述第二翻板组件包括第二板件和第二扭簧;
24.所述第二板件与所述尘盒组件相枢接;
25.所述第二扭簧的一个端脚与所述第二板件相连,所述第二扭簧的另一个端脚与所述尘盒组件相连。
26.在本公开的又一种实现方式中,所述尘盒组件内具有过滤件;
27.所述过滤件位于所述第二尘盒风口和所述第一尘盒风口之间,且所述过滤件靠近所述第一尘盒风口。
28.根据本公开的另一个方面,提供了一种扫地系统,包括扫地机器人和集尘装置;
29.所述扫地机器人为前文所述的扫地机器人;
30.所述集尘装置包括对接座、集尘筒和第二风机组件,所述对接座与所述扫地机器人可拆卸地相连通,所述集尘筒与所述对接座相连通,所述第二风机组件与所述集尘筒相连通。
31.在本公开的一种实现方式中,所述对接座包括座体、第一连接管和第二连接管;
32.所述第一连接管的第一端与所述座体相连通,所述第二连接管的第二端与所述扫地机器人可拆卸地相连通;
33.所述第二连接管的第一端与所述座体相连通,所述第二连接管的第二端与所述集尘筒相连通。
34.在本公开的另一种实现方式中,所述第一连接管的中部具有弹性。
35.在本公开的又一种实现方式中,所述集尘筒包括壳体和集尘袋;
36.所述壳体与所述对接座相连;
37.所述集尘袋位于所述壳体内,且与所述壳体可拆卸地相连,所述集尘袋与所述对接座相连通。
38.本公开实施例提供的技术方案带来的有益效果至少是:
39.通过本公开实施例提供的扫地机器人清扫地面时,第一风机组件正转,使得气流由尘盒组件流通至第一风机组件。在此过程中,气流由第二尘盒风口进入尘盒组件内,从而能够将地面上的垃圾由第二尘盒风口吸入尘盒组件内,并暂时储存。当尘盒组件内的垃圾存满后,扫地机器人移动至集尘装置处,并与集尘装置连通。在连通后,第一风机组件反转,使得气流由第一风机组件流通至尘盒组件。在此过程中,能够减少第二尘盒风口的气流流
入,避免了因气流由第二尘盒风口流入而影响集尘装置在尘盒组件内部建立低压空间,保证了集尘效果。并且,第一风机组件所形成的气流,还能够起到助推的作用,更进一步地提高了集尘效果。另外,通过将第一风机组件在正转和反转之间切换,能够改变气流的流向,从而吹动成团聚集的垃圾,达到了疏通垃圾的目的。在疏通垃圾后,集尘效果更佳。
附图说明
40.为了更清楚地说明本公开实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
41.图1是本公开实施例提供的扫地机器人的爆炸图;
42.图2是本公开实施例提供的扫地机器人的一种结构示意图;
43.图3是本公开实施例提供的扫地机器人的另一种结构示意图;
44.图4是本公开实施例提供的扫地机器人的剖视图;
45.图5是本公开实施例提供的扫地系统的结构示意图。
46.图中各符号表示含义如下:
47.1、尘盒组件;
48.11、第一尘盒风口;12、第二尘盒风口;13、第三尘盒风口;14、过滤件;
49.2、第一风机组件;
50.21、第一风机风口;22、第二风机风口;
51.3、第一翻板组件;
52.31、第一板件;32、第一扭簧;
53.4、第二翻板组件;
54.41、第二板件;42、第二扭簧;
55.100、扫地机器人;
56.200、集尘装置;
57.210、对接座;211、座体;212、第一连接管;213、第二连接管;220、集尘筒;221、壳体;222、集尘袋;223、盖板;230、第二风机组件。
具体实施方式
58.为使本公开的目的、技术方案和优点更加清楚,下面将结合附图对本公开实施方式作进一步地详细描述。
59.扫地系统是一种用于清扫房间地面的机器装置,其由扫地机器人和集尘装置组成。
60.在相关技术中,扫地机器人主要包括尘盒组件和风机组件,尘盒组件具有相互连通的连接风口、吸尘风口和集尘风口,风机组件与尘盒组件相连,且风机组件与连接风口相连通。扫地机器人工作时,在风机组件的作用下,地面上的垃圾将由吸尘风口被吸入尘盒组件内部并储存。当尘盒组件内装满后,扫地机器人能够移动至集尘装置处,并通过集尘风口与集尘装置对接。在对接完毕后,集尘装置利用自身的风力将尘盒组件内的垃圾吸收过来
并储存。
61.然而,由于吸尘风口和集尘风口连通,且吸尘风口与外界连通,所以集尘装置在通过自身的风力吸收尘盒组件内的垃圾时,无法很好的在尘盒组件内建立低压空间,导致吸收效果不理想。
62.为了解决上述技术问题,本公开实施例提供了一种扫地机器人,图1为该扫地机器人的爆炸图,图2为该扫地机器人的一种结构示意图,图3为该扫地机器人的另一种结构示意图,图2的视角与图1的视角相同,图3的视角与图2的视角相反,参见图1-3,在本实施例中,该扫地机器人包括尘盒组件1和第一风机组件2。
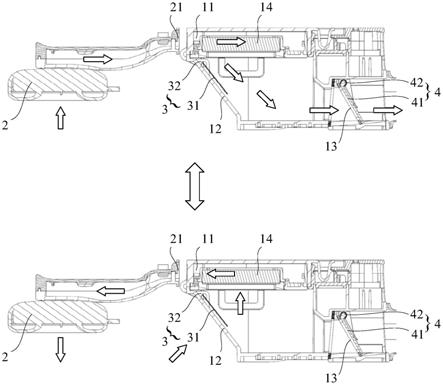
63.图4为扫地机器人的剖视图,图4上部分的空心箭头,为第一风机组件2在正转时气流的流向,图4下部分的空心箭头,为第一风机组件2在反转时气流的流向。
64.结合图4,在本实施例中,尘盒组件1具有相互连通的第一尘盒风口11和第二尘盒风口12。第一风机组件2与尘盒组件1相连,第一风机组件2具有相互连通的第一风机风口21和第二风机风口22,第一风机风口21与第一尘盒风口11相连通。第一风机组件2被配置为,当第一风机组件2正转时,气流方向为从尘盒组件1至第一风机组件2,当第一风机组件2反转时,气流方向为从第一风机组件2至尘盒组件1。
65.通过本公开实施例提供的扫地机器人清扫地面时,第一风机组件2正转,使得气流由尘盒组件1流通至第一风机组件2。在此过程中,气流由第二尘盒风口12进入尘盒组件1内,并由第二风机风口22排出第一风机组件2,从而能够将地面上的垃圾由第二尘盒风口12吸入尘盒组件1内,并暂时储存。当尘盒组件1内的垃圾存满后,扫地机器人移动至集尘装置处,并与集尘装置连通。在连通后,第一风机组件2反转,使得气流由第一风机组件2流通至尘盒组件1。在此过程中,气流由第二风机风口22进入第一风机组件2,能够减少第二尘盒风口12的气流流入,避免了因气流由第二尘盒风口12流入而影响集尘装置在尘盒组件1内部建立低压空间,保证了集尘效果。并且,第一风机组件2所形成的气流,还能够起到助推的作用,更进一步地提高了集尘效果。
66.另外,通过将第一风机组件在正转和反转之间切换,能够改变气流的流向,从而吹动成团聚集的垃圾,达到了疏通垃圾的目的。在疏通垃圾后,集尘效果更佳。
67.需要说明的是,第一风机组件2的正转和反转,并不限定特定的方向,仅表示第一风机组件2内叶轮的两个转向。举例来说,若第一风机组件2正转指的是内部的叶轮顺时针旋转,那么第一风机组件2反转指的是内部的叶轮逆时针旋转。
68.在扫地机器人清扫地面时,第一风机组件2正转,使得气流由尘盒组件1流通至第一风机组件2。为了使得垃圾在由第二尘盒风口12进入尘盒组件1后,不会随着气流进一步地由第一尘盒风口11进入第一风机组件2,在本实施例中,尘盒组件1内具有过滤件14,过滤件14位于第二尘盒风口12和第一尘盒风口11之间,且过滤件14靠近第一尘盒风口11。如此设计,使得在过滤件14的过滤下,垃圾在由第二尘盒风口12进入尘盒组件1后,会留在尘盒组件1内,进入第一风机组件2的气流不含带垃圾,从而提高了第一风机组件2的使用寿命。
69.示例性地,过滤件14为高效空气过滤网(high efficiency particulate air filter,hepa),从而保证了过滤器的过滤效果。
70.继续参见图4,在本实施例中,扫地机器人还包括第一翻板组件3。
71.第一翻板组件3位于尘盒组件1内,且与尘盒组件1相连,第一翻板组件3位于第二
尘盒风口12处。第一翻板组件3被配置为,当第一风机组件2正转时,第一翻板组件3露出第二尘盒风口12,当第一风机组件2反转时,第一翻板组件3封闭第二尘盒风口12。
72.通过本公开实施例提供的扫地机器人清扫地面时,第一风机组件2正转,使得气流由尘盒组件1流通至第一风机组件2。在此过程中,气流推开第一翻板组件3,使得第二尘盒风口12露出,气流能够将地面上的垃圾由第二尘盒风口12吸入尘盒组件1内,并暂时储存。当尘盒组件1内的垃圾存满后,扫地机器人移动至集尘装置处,并与集尘装置连通。在连通后,第一风机组件2反转,使得气流由第一风机组件2流通至尘盒组件1。在此过程中,气流将第一翻板抵压在第二尘盒风口12处,从而使得第二尘盒风口12被封闭。如此一来,第二尘盒风口12不会影响集尘装置在尘盒组件1内部建立低压空间,保证了集尘效果。
73.继续参见图4,在本实施例中,第一翻板组件3包括第一板件31和第一扭簧32。
74.第一板件31与尘盒组件1相枢接。第一扭簧32的一个端脚与第一板件31相连,第一扭簧32的另一个端脚与尘盒组件1相连。
75.在上述实现方式中,由于第一板件31与尘盒组件1相枢接,所以第一板件31能够以枢接轴线为轴相对于尘盒组件1摆动。在摆动的过程中,若第一板件31与尘盒组件1的内壁贴合,那么第一板件31能够封闭第二尘盒风口12,若第一板件31与尘盒组件1的内壁间隔,那么第一板件31能够露出第二尘盒风口12。由于第一板件31位于尘盒组件1内,所以第一板件31在向尘盒组件1外摆动时,会与尘盒组件1的内壁贴合,第一板件31在向尘盒组件1内摆动时,则会逐渐远离尘盒组件1的内壁,从而与尘盒组件1的内壁间隔。基于此,在第一风机组件2正转时,气流由外界进入尘盒组件1,即推动第一板件31向尘盒组件1内摆动,从而露出第二尘盒风口12,扫地机器人正常吸入垃圾。在第一风机组件2反转时,气流由尘盒组件1向外界流动,即推动第一板件31向尘盒组件1外摆动,从而封闭第二尘盒风口12,有利于在尘盒组件1的内部形成低压空间。
76.另外,由于第一板件31和尘盒组件1的内壁之间具有第一扭簧32,所以在第一扭簧32的作用下,能够保证第一风机组件2在不工作时,第一板件31与尘盒组件1的内壁贴合,即封闭第二尘盒风口12,从而避免了垃圾从第二尘盒风口12中漏出。而当第一风机组件2正转时,气流所产生的推力,足以克服第一扭簧32的弹力,从而推开第一板件31,使得第二尘盒风口12露出。
77.由前文可知,扫地机器人在集尘时,需要将尘盒组件1与集尘装置对接。下面对扫地机器人的相关部件进行介绍。
78.继续参见图4,在本实施例中,尘盒组件1具有第三尘盒风口13,第三尘盒风口13分别与第二尘盒风口12和第二尘盒风口12连通,第三尘盒风口13用于与集尘装置连通。扫地机器人还包括第二翻板组件4,第二翻板组件4位于尘盒组件1外,且与尘盒组件1相连,第二翻板组件4位于第三尘盒风口13处。当第一风机组件2正转时,第二翻板组件4封闭第三尘盒风口13,当第一风机组件2反转时,第二翻板组件4露出第三尘盒风口13。
79.通过本公开实施例提供的扫地机器人清扫地面时,第一风机组件2正转,使得气流由尘盒组件1流通至第一风机组件2。在此过程中,气流不足以将第二翻板组件4推开,第三尘盒风口13依然被第二翻板组件4封闭。如此一来,避免了在扫地机器人清扫地面时,尘盒组件1内的垃圾从第三尘盒风口13处被吹出。在扫地机器人与集尘装置连通后,第一风机组件2反转,使得气流由第一风机组件2流通至尘盒组件1。在此过程中,第一风机组件2产生的
气流和集尘装置产生的气流一同作用于第二翻板组件4,从而推开第二翻板组件4,使得第三尘盒风口13露出,气流能够将尘盒组件1内的垃圾由第三尘盒风口13吹入集尘装置中。
80.可选地,第一尘盒风口11与第二尘盒风口12之间的距离,小于第一尘盒风口11与第三尘盒风口13之间的距离。如此设计,更进一步的保证了在扫地机器人清扫地面时,第一风机组件2正转所产生的气流,不会将第二翻板组件4推开。避免了在扫地机器人清扫地面时,尘盒组件1内的垃圾从第三尘盒风口13处被吹出。
81.可选地,第二翻板组件4包括第二板件41和第二扭簧42。
82.第二板件41与尘盒组件1相枢接。第二扭簧42的一个端脚与第二板件41相连,第二扭簧42的另一个端脚与尘盒组件1相连。
83.在上述实现方式中,由于第二板件41与尘盒组件1相枢接,所以第二板件41能够以枢接轴线为轴相对于尘盒组件1摆动。在摆动的过程中,若第二板件41与尘盒组件1的外壁贴合,那么第二板件41能够封闭第三尘盒风口13,若第二板件41与尘盒组件1的外壁间隔,那么第二板件41能够露出第三尘盒风口13。由于第二板件41位于尘盒组件1外,所以第二板件41在向尘盒组件1内摆动时,会与尘盒组件1的外壁贴合,第二板件41在向尘盒组件1外摆动时,则会逐渐远离尘盒组件1的外壁,从而与尘盒组件1的外壁间隔。基于此,在第一风机组件2反转时,第一风机组件2产生的气流由尘盒组件1向外界流动,叠加上集尘装置产生的气流,能够推动第二板件41向尘盒组件1外摆动,从而露出第三尘盒风口13,使得尘盒组件1内的垃圾被吹入集尘装置。
84.另外,由于第二板件41和尘盒组件1的外壁之间具有第二扭簧42,所以在第二扭簧42的作用下,能够保证第一风机组件2在不工作时,第二板件41与尘盒组件1的外壁贴合,即封闭第三尘盒风口13,从而避免了垃圾从第三尘盒风口13中漏出。当第一风机组件2反转且集尘装置工作时,气流所产生的推力,足以克服第二扭簧42的弹力,从而推开第二板件41,使得第三尘盒风口13露出。
85.图5为扫地系统的结构示意图,结合图5,在本实施例中,该扫地系统包括扫地机器人100和集尘装置200。
86.扫地机器人100为图1-4所示的扫地机器人,集尘装置200包括对接座210、集尘筒220和第二风机组件230,对接座210与扫地机器人100可拆卸地相连通,集尘筒220与对接座210相连通,第二风机组件230与集尘筒220相连通。
87.在扫地机器人100与集尘装置200对接后,对接座210和第三尘盒风口13连通。第二风机组件230工作,产生的气流由对接座210流通至集尘筒220。与此同时,第一风机组件2反转,使得气流由第一风机组件2流通至尘盒组件1。在此过程中,第一风机组件2产生的气流和第二风机组件230产生的气流,能够一同作用于第二翻板组件4,从而推开第二翻板组件4,使得第三尘盒风口13露出,气流能够将尘盒组件1内的垃圾由第三尘盒风口13吹入对接座210,并最终进入集尘筒220内。
88.继续参见图4,在本实施例中,对接座210包括座体211、第一连接管212和第二连接管213。
89.第一连接管212的第一端与座体211相连通,第二连接管213的第二端与扫地机器人100可拆卸地相连通。第二连接管213的第一端与座体211相连通,第二连接管213的第二端与集尘筒220相连通。
90.在上述实现方式中,对接座210用于对接扫地机器人100,并将扫地机器人100内的垃圾引导进集尘筒220内。其中,第一连接管212用于对接扫地机器人100,第二连接管213用于连接集尘筒220。
91.为了便于扫地机器人100对接集尘装置200,可选地,第一连接管212的中部具有弹性。如此一来,在扫地机器人100与第一连接管212对接的过程中,第一连接管212能够利用自身的弹性,产生一定的形变,从而适应性的对准扫地机器人100,避免了直接硬性连接,降低了对接难度。
92.在本实施例中,集尘筒220包括壳体221和集尘袋222。壳体221与对接座210相连,集尘袋222位于壳体221内,且与壳体221可拆卸地相连,集尘袋222与对接座210相连通。
93.在上述实现方式中,集尘袋222用于储存垃圾,在集尘袋222装满后,用于能够将集尘袋222从壳体221内拆卸出来,以便清倒处理。
94.在本实施例中,集尘筒220还包括盖板223,盖板223可拆卸地安装在壳体221的顶部,从而能够对集尘袋222进行遮盖,避免了垃圾露出。
95.以上所述仅为本公开的可选实施例,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1