集污箱及清洁机器人的制作方法
1.本实用新型涉及清洁设备领域,特别是涉及一种集污箱及清洁机器人。
背景技术:
2.目前智能化已成为家用电器行业发展的趋势,随着控制技术和自动化技术的进步,各种具有扫吸拖洗等功能的清洁机器人正快速地进入人们的家居生活。洗地机作为清洁机器人的一种,其能凭借一定的人工智能,自动地完成地板擦洗作业。洗地机在结构上至少包括一个能够收集脏污的集污箱,用于收集清洁作业中的污物。
3.现有技术中,洗地机的集污箱收集污物时,通常都将固相垃圾和污液混杂在一起。用户清理集污箱的污物时,要么倒入垃圾桶,要么倒入下水道。由于固、液混杂在一起,倒入垃圾桶,污液容易漏出;倒入下水道,则容易导致管道堵塞。
技术实现要素:
4.基于此,有必要针对上述问题,提供一种能够实现固、液分开收集的集污箱。
5.一种集污箱,应用于执行工作面清洁作业的清洁机器人,其特征在于,包括:
6.箱体,具有一收容腔,用于收集污物;
7.盖体,盖设在所述箱体上;
8.固液分离件,所述固液分离件设置于所述箱体内,用于将所述收容腔分隔为固相收集区和液相收集区;
9.吸污管,所述吸污管具有第一端和第二端,所述第一端与所述固相收集区连通,所述第二端朝向并接近所述工作面;及
10.排风管,所述排风管的一端与所述液相收集区的顶部连通,用于排出空气。
11.本实用新型的集污箱因为包括固液分离件等组件,当其应用于清洁机器人的清洁作业时,气流裹挟污物先是从吸污管被吸入,然后依次经过被固液分离件分隔出的固相收集区和液相收集区,最后气流从排风管被排出。在此过程中,首先污物中的固相垃圾被固相收集区收集,而后液相垃圾透过固液分离件进入液相收集区被收集,最后气流从排风管被排出。如此以来,实现了污物收集时的固、液分离。
12.在其中一个实施例中,所述收容腔的内侧壁设置有定位槽,所述固液分离件为固液分离板,所述固液分离板可拆卸地插设于所述定位槽中。
13.在其中一个实施例中,所述固液分离板包括:
14.所述固液分离板包括:
15.第一竖板,所述固液分离板通过所述第一竖板插设于所述定位槽中;
16.横板,所述横板上开设有若干第一固液分离孔,所述横板与所述第一竖板的底边连接,所述横板从所述第一竖板向所述液相收集区的内侧壁延伸并抵接。
17.在其中一个实施例中,所述固液分离板还包括第二竖板,所述第二竖板从所述第一竖板与所述横板的连接处向靠近所述收容腔的底壁延伸并抵接,所述横板上开设有若干
第二固液分离孔,所述若干第二固液分离孔的孔径小于所述若干第一固液分离孔的孔径。
18.在其中一个实施例中,所述固液分离件为具有液相透过性的固液分离袋,所述固液分离袋具有一袋口,所述袋口与所述吸污管的第一端可拆卸式连接。
19.在其中一个实施例中,所述盖体的内表面靠近所述固相收集区的一侧设置有第一安装位;所述集污箱还包括一过滤组件,所述过滤组件可拆卸地设置在所述第一安装位上;所述排风管与所述过滤组件连通。
20.在其中一个实施例中,所述过滤组件包括一级过滤件、二级过滤件及安装架;所述安装架设置有安装区和连接区,所述连接区与所述安装区相邻;所述一级过滤件、所述二级过滤件依次层叠设置在所述安装区,所述排风管与连接区连通。
21.在其中一个实施例中,所述盖体与所述箱体的连接方式选自扣合连接、枢接及铰接中的至少一种。
22.在其中一个实施例中,所述盖体包括一提手,所述提手设于所述盖体的外表面,且与所述盖体枢接。
23.此外,还提供一种清洁机器人,包括机器本体和上述任一实施例所述的集污箱;所述机器本体上设置有安装位,所述本体内部设置有风机;所述集污箱可拆卸式地设置于所述安装位上,且所述排风管远离所述液相收集区的一端与所述风机连通。
附图说明
24.图1为一实施方式的集污箱的轴侧结构示意图;
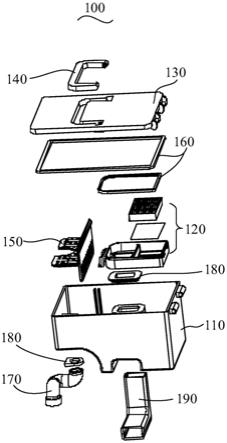
25.图2为一实施方式的集污箱的爆炸结构示意图;
26.图3为图4所示的固液分离板安装箱体时的轴侧结构示意图;
27.图4为一实施方式的固液分离板的轴侧示意图;
28.图5为另一实施方式的固液分离板的轴侧示意图;
29.图6为一实施方式的过滤组件的爆炸结构示意图;
30.图7为一实施方式的集污箱的剖面结构示意图;
31.图8为一实施方式的清洁机器人的轴侧结构示意图。
具体实施方式
32.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳实施方式。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本实用新型的公开内容理解的更加透彻全面。
33.需要说明地是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“内”“外”“左”“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
34.现有技术中,具有拖洗功能的清洁机器人(也叫洗地机)的集污箱收集污物时,通常都是将固相垃圾和污液混杂在一起。用户清理集污箱的污物时,要么倒入垃圾桶,要么倒入下水道。由于固、液混杂在一起,倒入垃圾桶,污液容易漏出;倒入下水道,则容易导致管
道堵塞。为此,设计了如下各实施方式的集污箱以解决上述的技术问题。
35.如图1、图2及图8所示,为一实施方式的集污箱100,应用于执行工作面清洁作业的清洁机器人10。集污箱100包括箱体110、盖体130、固液分离件150、吸污管170及排风管190。
36.请一并参阅图3和图7,箱体110具有一收容腔111,用于收集污物;盖体130盖设在箱体110上,优选地,盖体130与箱体110的连接方式选自扣合连接、枢接及铰接中的至少一种;固液分离件150设置于箱体110内,用于将收容腔111分隔为固相收集区111a和液相收集区111b;吸污管170具有第一端(图未示,下同)和第二端(图未示,下同),第一端与固相收集区111a连通,第二端朝向并接近工作面;排风管190的一端与液相收集区111a的顶部连通,用于排出空气。
37.本实用新型的集污箱100因为包括固液分离件150等组件,当其应用于清洁机器人的清洁作业时,气流裹挟污物先是从吸污管170被吸入,然后依次经过被固液分离件150分隔出的固相收集区111a和液相收集区111b,最后气流从排风管190被排出。在此过程中,首先污物中的固相垃圾被固相收集区111a收集,而后液相垃圾透过固液分离件150进入液相收集区111b被收集,最后气流从排风管190被排出,如此以来,实现了污物收集时的固、液分离。
38.可以理解地是,在上述的实施方式中,在盖体130内表面四周或箱体110的开口四周可设置必要的密封件160。
39.可以理解地是,在上述的实施方式中,吸污管170的第一端与固相收集区111a的连接处可设置必要的软质件180,用于实现两硬质材料连接处的密封与缓冲。排风管190与液相收集区111b的连接处亦可类似设置,故在此不再赘言。
40.如图3所示,在一实施方式中,收容腔111的内侧壁设置有定位槽113,固液分离件150为固液分离板a150,固液分离板a150可拆卸地插设于定位槽113中。采用可拆卸地插设的方式设置固液分离板a150,有利于用户对固液分离件150进行清理与维护。
41.如图4所示,进一步地,固液分离板a150包括第一竖板a151和横板a153。固液分离板a150通过第一竖板a151插设于定位槽113中;横板a153与第一竖板a151的底边连接,横板a153上开设有若干第一固液分离孔a153a,横板a153从第一竖板a151向液相收集区111b的内侧壁延伸并抵接。也就是说,当固液分离板a150插设于定位槽113时,第一竖板a151、横板a153和收容腔111的部分侧壁围成上述的固相收集区111a;收容腔111内非固相收集区111a以外的区域则构成液相收集区111b。在图示的实施方式,横板a153与第一竖板a151垂直,二者呈90
°
,设计为90
°
加工倒模方便,而且还比较美观;在其他的实施方式中,横板a153与第一竖板a151也可以设置为锐角,设置为锐角固相垃圾通常会蓄积在锐角顶点所在连接处的低处,用户取出固液分离板a150的同时可以一并把固相垃圾带出。
42.如图5所示,进一步地,固液分离板a150还包括第二竖板a155,第二竖板a155从第一竖板a151与横板a153的连接处向靠近收容腔111的底壁延伸并抵接;横板a153上开设有若干第二固液分离孔a155a,若干第二固液分离孔a155a的孔径小于所述若干第一固液分离孔a153a的孔径。此时,如图7所示,第一竖板a151、横板a153和收容腔111位于横板a153以上的内侧壁围成一级固相收集区111a1;第二竖板a155、横板a153、收容腔111位于横板a153以下的内侧壁及底壁共同围成二级固相收集区111a2。一级固相收集区111a1收集被大孔径的第一固液分离孔a153a过滤而留下的大尺寸固相垃圾;二级固相收集区111a2收集被小孔径
的第二固液分离孔a155a过滤而留下的小尺寸固相垃圾;液相垃圾和尺寸小于第二固液分离孔a155a的颗粒垃圾则透过第二竖板a155上的第二固液分离孔a155a进入液相收集区111b域被收集。利用不同孔径的分离孔将固相垃圾分为大尺寸的固相垃圾和相对小尺寸的固相垃圾,有利于固相垃圾的分级处理。
43.在一实施方式中,固液分离件150为具有液相透过性的固液分离袋,固液分离袋具有一袋口,袋口与吸污管170的第一端可拆卸式连接。当固液分离件150为固液分离袋时,袋子内部的区域则为固相收集区,袋子外侧的收容腔111其他位置则为液相收集区。采用固液分离袋作为固液分离件150,用户清理固相垃圾时只需要打包固液分离袋丢弃,并更换新的固液分离袋即可,更加的卫生、方便。
44.在一实施方式中,盖体130的内表面靠近固相收集区111a的一侧设置有第一安装位(图未示,下同);图7所示,集污箱100还包括一过滤组件120,过滤组件120可拆卸地设置在第一安装位上;排风管190与过滤组件120连通。可以理解地是,在上述的实施方式中,在过滤组件120内表面四周或者第一安装位的四周可设置必要的密封件160。如此设置,在排风管190的进风口部就设置过滤组件120可以从一开始就避免液相被吸入风道或者风机,而不需要在风道或者风机口再设置过滤液相的组件。
45.如图6所示,进一步地,上述过滤组件120包括一级过滤件121、二级过滤件123及安装架125;安装架125设置有安装区125a和安装区125b,安装区125b与安装区125a相邻;一级过滤件121、二级过滤件123依次层叠设置在安装区125a,排风管190与安装区125b连通。
46.具体地,一级过滤件121为过滤网,二级过滤件123为海帕(hepa),二者皆为本领域的常用材料,在此不做赘述。
47.请再次参阅图2,在一些实施方式中,盖体130包括一提手140,提手140设于盖体130的外表面,且与盖体130枢接。提手140具有合拢时的第一位置和旋离时的第二位置。设置提手方便用户取出具有收集有垃圾的集污箱100。具进一步地,盖体130外表面的对应位置设有容置提手140的凹槽;当提手140处于第一位置时,提手140容置于上述的凹槽中,且与盖体130的外表面平齐或低于盖体130的外表面。如此设置,可使盖体130更美观,箱体110结构更紧凑。
48.此外,如图8所示,还提供一实施方式的清洁机器人10,该清洁机器人10包括机器本体200和上述任一实施方式的集污箱100;机器本体200上设置有安装位210,本体内部设置有风机(图未示,下同);集污箱100可拆卸式地设置于安装位210上,且排风管190远离液相收集区111b的一端与风机连通。
49.具体地,集污箱100设于安装位210时,其外壁既可以作为机器本体200外壳或外形的一部分;也可以在安装位210上再设置盖板将集污箱100盖设在安装位210中。可根据清洁机器人10的具体结构需要进行设计,在此不做限制。
50.具体地,排风管190远离液相收集区111b的一端与风机可以是直接连通或者通过风道间接连通;风道或者风机口亦可设置过滤装置。具体的设置方式可根据清洁机器人10实际设计的需要而选择、调整。
51.可以理解地是,除上述介绍的尘盒集污箱100外,上述各实施方式的清洁机器人10还包括控制系统、传感器系统、清洁组件、驱动系统及电源系统。控制系统用于根据预定程序或传感器系统返回的信号控制设备执行特定的任务或动作;传感器系统用于检测设备本
身各部件部件的工作状态信息、设备所处的外部环境状态新及设备在环境中位置信息并发送给控制系统;清洁功能组件用于完成各种扫、吸、拖、洗等清洁作业;驱动系统用于驱动驱动轮,带动机器在工作面上运动;电源系统为设备的各系统提供能量来源。上述各系统因为并非本实用新型的改进重点,所以在本实用新型的各实施方式的技术方案中未做重点介绍。
52.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
53.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对保护范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1