一种模块化地面检测装置及其扫地机器人的制作方法
1.本实用新型涉及一种扫地机器人,具体是一种模块化地面检测装置及其扫地机器人。
背景技术:
2.传统扫地机器人上需要设置地面检测装置以实时检测地面情况,当遇特殊情况时可及时作出反应;市面上的地面检测装置存在漏光、密封性差等缺陷。如中国专利文献cn214906414u公开了一种地面清洁机器人,并具体公开了:包括主机和设置在主机底部并且用于检测地面状况的传感器组件,传感器组件包括电路板,电路板上从前至后依次排列有前地毯接收器、悬崖接收器、红外发射器和后地毯检测器,其中,前地毯接收器与水平面之间的锐角大于后地毯接收器与水平面之间的锐角。该传感器组件中,前地毯接收器、悬崖接收器、红外发射器和后地毯检测器分别装配于固定支架上,而彼此之间没有有效的遮光结构,导致信号之间相互干涉影响,进而影响检测结果;此外,电路板、固定支架和外壳之间的装配麻烦且稳定性较差。
3.因此,有必要对现有技术做进一步改进。
技术实现要素:
4.本实用新型的目的在于克服上述现有技术存在的不足,而提供一种模块化地面检测装置及其扫地机器人,本模块化地面检测装置的遮光性好,安装稳定可靠,组装效率高。
5.本实用新型的目的是这样实现的:
6.一种模块化地面检测装置,包括第一壳体、第二壳体、透光体和红外传感器;所述第一壳体与所述第二壳体配合装配形成用于容纳所述红外传感器的容置腔体;所述透光体连接所述第一壳体和/或第二壳体;所述第一壳体上设有第一装配面和配合凹槽;所述第二壳体上设有第二装配面和配合凸台;当所述第一壳体与所述第二壳体组合时,所述第一装配面与所述第二装配面彼此贴合,所述配合凹槽与所述配合凸台彼此装嵌配合。
7.所述容置腔体包括相互左右对称的第一容置腔体和第二容置腔体;所述红外传感器包括设置于第一容置腔体上的第一红外传感器、及设置于第二容置腔体上的第二红外传感器。
8.所述第一壳体和/或所述第二壳体上设置有遮光部;所述遮光部位于所述第一容置腔体与所述第二容置腔体之间,且延伸至所述透光体。
9.所述第一壳体上设置有第一腔体,所述第二壳体上设置有第二腔体;当所述第一壳体与所述第二壳体组合时,所述第一腔体与所述第二腔体共同构成所述容置腔体。
10.所述透光体由透光材料制成;所述透光体上设置有一块以上倾斜延伸的连接凸部;所述第一壳体与所述第二壳体组合成型一个以上倾斜延伸的连接凹部;当所述透光体安装时,所述连接凸部与所述连接凹部彼此装嵌配合。
11.所述容置腔体呈一端大一端小的喇叭状设置,所述红外传感器设置于所述容置腔
体小端,所述容置腔体大端开口设置且与所述透光体对应。
12.所述第一壳体上设置有倒扣部,所述第二壳体上设置有卡钩;当所述第一壳体与所述第二壳体组合时,所述倒扣部与所述卡钩相互扣接。
13.所述第一壳体和所述第二壳体分别有不透光材料制成。
14.一种扫地机器人,包括机器人本体;还包括上述模块化地面检测装置;所述模块化地面检测装置设置于所述机器人本体上。
15.所述机器人本体上设置有用于容纳所述模块化地面检测装置的槽腔;所述槽腔上设置有透光孔、限位凸台和钩部;所述透光体的透光端面外露于所述透光孔;所述第一壳体、第二壳体或透光体上设置有限位台阶,所述限位凸台与所述限位台阶彼此限位配合;所述钩部卡扣作用于所述第一壳体或所述第二壳体上。
16.本实用新型的有益效果如下:
17.第一壳体与第二壳体相互配合装配,彼此之间形成独立的容置腔体,红外传感器设置于相应的容置腔体中,有效的分隔各红外传感器,保证两红外传感器之间的遮光效果,避免信号相互干涉而影响检测结果;第一壳体与第二壳体之间设置有相互凹凸配合的配合凸台和配合凹槽,配合凸台与配合凹槽彼此装配后形成的凹凸形状可完全将各容置腔体及壳体内部的信号(光线)挡住,保证检测效果,同时可提高两壳体彼此装配的可靠性和密封性;配合凸台与配合凹槽之间的配合具有一定的定位效果,进而可使第一壳体与第二壳体之间的装配更加方便、准确;通过以左右对称的方式设置第一容置腔体和第二容置腔体,而第一容置腔体中安装第一红外传感器,第二容置腔体中安装第二红外传感器,两红外传感器的安装位置可以互换,因此在安装红外传感器时可以随意安装,进而使检测装置的组装更加简单,方便,快捷,有效提高组装效率。
附图说明
18.图1和图2分别为本实用新型一实施例中模块化地面检测装置不同方位的组装示意图。
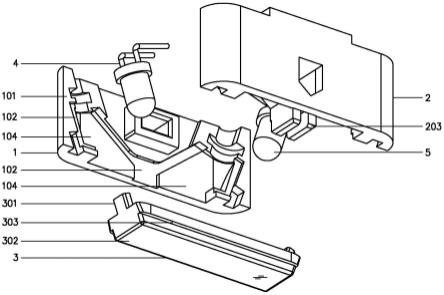
19.图3为本实用新型一实施例中模块化地面检测装置的爆炸图。
20.图4和图5分别为本实用新型一实施例中模块化地面检测装置不同方位的剖视图。
21.图6为本实用新型一实施例中第一壳体的结构示意图。
22.图7为本实用新型一实施例中第二壳体的结构示意图。
23.图8为本实用新型一实施例中扫地机器人的结构示意图。
24.图9为本实用新型一实施例中扫地机器人的局部剖视图。
具体实施方式
25.下面结合附图及实施例对本实用新型作进一步描述。
26.参见图1-图7,本实施例涉及的模块化地面检测装置100,包括第一壳体1、第二壳体2、透光体3和红外传感器;第一壳体1与第二壳体2配合装配、彼此之间形成用于容纳红外传感器的容置腔体;透光体3连接第一壳体1端部和第二壳体2端部;第一壳体1内侧部设有第一装配面101和配合凹槽102,配合凹槽102凹陷于第一装配面101上;第二壳体2内侧部设有第二装配面201和配合凸台202,配合凸台202凸起于第二装配面201上;配合凹槽102和配
合凸台202分别呈条形设置,且彼此一一对应;当第一壳体1与第二壳体2组合时,第一装配面101与第二装配面201彼此紧密贴合,配合凹槽102与配合凸台202彼此装嵌配合。本模块化地面检测装置100中,第一壳体1与第二壳体2相互配合装配,彼此之间形成独立的容置腔体,红外传感器设置于相应的容置腔体中,有效的分隔各红外传感器,保证两红外传感器之间的遮光效果,避免信号相互干涉而影响检测结果;第一壳体1与第二壳体2之间设置有相互凹凸配合的配合凸台202和配合凹槽102,配合凸台与配合凹槽彼此装配后形成的凹凸形状可完全将各容置腔体及壳体内部的信号(光线)挡住,保证检测效果,同时可提高两壳体彼此装配的可靠性和密封性;配合凸台202与配合凹槽102之间的配合具有一定的定位效果,进而可使第一壳体1与第二壳体2之间的装配更加方便、准确。
27.进一步地,容置腔体包括相互左右对称的第一容置腔体a和第二容置腔体b;红外传感器包括设置于第一容置腔体a上的第一红外传感器4、及设置于第二容置腔体b上的第二红外传感器5;各红外传感器分别设置于对应的容置腔体中,有效隔绝相应的红外传感器,避免信号相互干涉而影响检测结果,本实施例中,第一红外传感器4可以是信号发射源,第二红外传感器5可以是信号接收源,第一红外传感器4与第二红外传感器5之间有红外线信号交互,以达到地面检测的效果;此外,第一容置腔体和第二容置腔体彼此以左右对称的方式设置,安装第一、第二红外传感器时可以随意安装,进而使检测装置的组装更加简单,方便,快捷,有效提高组装效率。
28.进一步地,本实施例中的第二壳体2底部一体成型有遮光部203;遮光部203位于第一容置腔体a与第二容置腔体b之间,且向下延伸至透光体3;遮光部203可有效隔绝第一容置腔体a和第二容置腔体b,避免两容置腔体之间出现漏光现象,进一步保证地面检测的准确性。
29.进一步地,第一壳体1内侧一体成型有第一腔体104,第二壳体2内侧一体成型有第二腔体204;当第一壳体1与第二壳体2组合时,第一腔体104与第二腔体204共同构成容置腔体。本实施例中,第一壳体1内侧设置有两第一腔体104,第二壳体内侧设置有两第二腔体204,一对第一腔体104与第二腔体204共同组成第一容置腔体a,另一对第一腔体104与第二腔体204共同组成第二容置腔体b。
30.进一步地,透光体3由透光材料制成;透光体3两端分别设置有倾斜延伸的连接凸部301,两端的连接凸部301分别向不同方向倾斜延伸;第一壳体1与第二壳体2组合成型两倾斜延伸的连接凹部c,两连接凹部c分别向不同方向倾斜延伸;连接凸部301与连接凹部c一一对应;当透光体3安装时,连接凸部301与连接凹部c彼此装嵌配合,由于连接凸部301和连接凹部c分别向不同方向倾斜延伸,保证透光体3的装配结构稳固有效。
31.进一步地,容置腔体呈一端大一端小的喇叭状设置,红外传感器固定设置于容置腔体小端,容置腔体大端开口设置且与透光体3对应,以便信号穿过透光体3具体地,第一、第二容置腔体分别呈喇叭状,第一、第二红外传感器分别设置于所在容置腔体的小端。
32.进一步地,第一壳体1上开设有安装孔106,安装孔106内侧壁上设置有倒扣部105,第二壳体2内侧设置有卡钩205;当第一壳体1与第二壳体2组合时,卡钩205伸入安装孔106内,且倒扣部105与卡钩205相互扣接,使第一壳体1与第二壳体2相互紧固连接。
33.进一步地,为了提高遮光性能,第一壳体1和第二壳体2分别有不透光材料制成。
34.参见图8和图9,本实施例涉及的扫地机器人,包括机器人本体200、及上述模块化
地面检测装置100;本实施例中,三套模块化地面检测装置100分别设置于机器人本体200底部,以实时检测地面情况。
35.进一步地,机器人本体200上设置有用于容纳模块化地面检测装置100的槽腔6;槽腔6上设置有透光孔601、限位凸台602和钩部603,透光孔601位于槽腔6底部,限位凸台602沿透光孔601边缘延伸设置,钩部603设置于槽腔6顶部;透光体3底部的透光端面303外露于透光孔601,以便信号往外发射以检测地面;透光体3上设置有限位台阶302,该限位台阶302位于透光端面303周侧,限位凸台602与限位台阶302彼此限位配合,以限制模块化地面检测装置100底部偏移,钩部603卡扣作用于第二壳体2顶部,以限制模块化地面检测装置100顶部偏移,使模块化地面检测装置100稳定可靠。
36.上述为本实用新型的优选方案,显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本领域的技术人员应该了解本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1