限位组件、盒体装置及清洁机器人的制作方法
1.本实用新型涉及清洁设备技术领域,特别是涉及限位组件、盒体装置及清洁机器人。
背景技术:
2.清洁机器人中通常都会设置一个可拆卸的盒体装置,此盒体装置可以是用于收集垃圾的尘盒,也可以是用于提供清洁介质的水箱,还可以是组合的或者一体式的尘盒水箱。
3.盒体装置与清洁机器人本体通常通过按压卡扣的方式实现连接限位,现有按压卡扣的锁扣运动方向一般与按键受力方向相同。但是由于实际产品空间与结构的限制,往往需要锁扣运动方向与按键受力方向不同的卡扣开关。
4.为了改变外力的传动方向,通常会选择齿轮传动机构、四连杆机构,曲柄滑块机构,螺旋机构,凸轮结构等结构方案来实现。但是,上述传动机构结构复杂,占用空间大,且生产装配时操作工序繁琐。
技术实现要素:
5.基于此,有必要针对上述问题,提供一种限位组件、盒体装置及清洁机器人。本实用新型提供的限位组件结构简单、占用空间小、位置灵活,能有效减少对盒体装置的空间占用,从而使清洁机器人的结构更加紧凑合理。
6.一种限位组件,包括:壳体,所述壳体上设有第一限位槽;受力件,所述受力件设置在所述第一限位槽内,所述受力件受力后能够沿第一方向往复移动;扣位件,所述扣位件与所述受力件配合,所述受力件在所述第一限位槽内沿第一方向往复移动时,所述受力件促使所述扣位件沿与所述第一方向相交的第二方向移动,并使所述扣位件相对所述受力件形成第一位置和第二位置,当所述扣位件位于所述第一位置时,所述扣位件能够与清洁机器人卡合连接,当所述扣位件位于所述第二位置时,所述扣位件能够与清洁机器人相脱离。
7.本技术公开了一种限位组件,通过受力件、扣位件之间相互配合实现作用力在不同方向的分解,从而解决了常规限位组件中对受力件的作用力与扣位件运动方向一致而导致限位组件占用空间大的问题。
8.在其中一个实施例中,所述受力件包括扣位本体以及第一限位部,所述第一限位部与所述扣位本体连接,所述第一限位部设置在所述扣位本体的一侧,所述第一限位部上设有第一斜面,所述扣位件上设有与所述第一斜面相适配的第二斜面,所述扣位本体沿所述第一方向移动时,所述第一斜面与所述第二斜面配合带动所述扣位件沿所述第二方向移动。
9.在其中一个实施例中,限位组件还包括弹性件,所述弹性件设置在所述第一限位槽内,所述弹性件的一端与所述受力件相抵接,所述弹性件的另一端与所述壳体相抵接。
10.在其中一个实施例中,所述受力件连接于所述扣位本体远离所述第一限位部的一侧;所述壳体上还设有与所述第二限位部相适配的第二限位槽,所述第二限位槽与所述第
一限位槽连通;所述弹性件部分设置在所述第二限位槽内,所述弹性件远离所述第二限位槽一端套设于所述第二限位部上。
11.在其中一个实施例中,所述扣位本体与所述第一限位部的所述第一斜面围合形成第三限位槽,所述扣位件设置在所述第三限位槽内。
12.在其中一个实施例中,所述第三限位槽上还设有第三限位部和第四限位部,所述第三限位部与所述第四限位部在所述第三限位槽内相对设置,所述扣位件还设有第五限位部,所述第五限位部能分别与所述第三限位部或所述第四限位部相抵接。
13.在其中一个实施例中,限位组件还包括定位件,所述定位件与所述壳体连接形成所述第一限位槽,所述定位件上开设有限位通孔,所述扣位件至少部分能凸出所述限位通孔。
14.在其中一个实施例中,所述扣位本体上还设有第四限位槽,所述壳体上开设有与所述第四限位槽连通的缺口。
15.一种盒体装置,包括盒体本体以及如前述任意一项所述的限位组件,所述盒体本体用于清洁机器人执行清洁作业中收集垃圾或者提供清洁介质。
16.在其中一个实施例中,盒体装置还包括设置在所述盒体本体上的连接件,所述连接件上开设有与所述扣位件相适配的扣位槽,所述限位组件通过所述扣位件与所述扣位槽配合连接固定于所述盒体本体上,所述连接件还用于与清洁机器人连接。
17.一种清洁机器人,包括机身以及如前述任意一项所述的盒体装置;所述机身上开设有安装位,所述盒体装置安装在所述安装位中,并通过所述限位组件实现可拆卸连接。
18.本技术的限位组件,通过受力件、扣位件之间相互配合实现作用力在不同方向的分解,从而解决了常规限位组件中对受力件的作用力与扣位件运动方向一致而导致限位组件占用空间大的问题。因此,本实用新型的限位组件的使用能够有效减少对清洁机器人尘盒或水箱容量空间的占用,有效节约生产成本。
附图说明
19.图1为自然状态下受力件与扣位件之间的位置关系图;
20.图2为受力状态下受力件与扣位件之间的位置关系图;
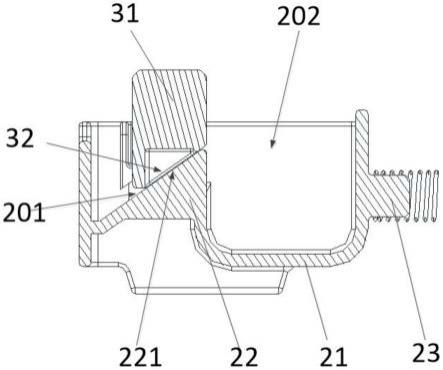
21.图3为弹性件受力状态下受力件与扣位件之间的位置关系剖视图;
22.图4为弹性件复位状态下受力件与扣位件之间的位置关系剖视图;
23.图5为盒体装置的爆炸图;
24.图6为限位组件在盒体本体上的装配位置图;
25.图7为限位组件在盒体装置上受力与非受力状态下的位置图。
26.其中,附图标记与部件名称之间的对应关系为:
27.1壳体,101第一限位槽,102第二限位槽,103缺口;
28.2受力件,21扣位本体,22第一限位部,221第一斜面,23第二限位部,24第三限位部,25第四限位部,201第三限位槽,202第四限位槽;
29.3扣位件,31第五限位部,32第二斜面;
30.4弹性件;
31.5定位件,501限位通孔;
32.6盒体本体;
33.7连接件,701扣位槽。
具体实施方式
34.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
35.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
36.基于灵便、美观及家用性的考虑,清洁机器人通常都被设计为一定厚度的圆形或者d形结构,其内部空间十分有限,而在其有限的空间内需要设置主板、风机、风道、电池组、电机、传感器、盒体装置(尘盒、水箱或其组合)等一系列的硬件结构,这就要求设计人员科学合理地利用好其内部的每一寸空间。
37.清洁机器人的盒体装置通常都会可拆卸地设置在机器本体的安装位中,通过按压卡扣的方式在机器本体上实现安装固定,现有按压卡扣的锁扣运动方向一般与按键受力方向相同,但是由于实际产品空间与结构的限制,需要一种锁扣运动方向与按键受力方向不同的卡扣开关。本领域的技术人员为了改变外力的传动方向,通常会选择齿轮传动机构、四连杆机构,曲柄滑块机构,螺旋机构,凸轮结构等结构方案来实现。但是,上述传动机构结构复杂,占用空间大,且生产装配时操作工序繁琐。
38.下面参照附图描述本实用新型一些实施例所述限位组件、盒体装置以及清洁机器人。
39.本实用新型第一方面的实施例提供了一种限位组件。
40.如1至图5所示,本实施例公开了一种限位组件,包括:壳体1,壳体1上设有第一限位槽101;受力件2,受力件2设置在第一限位槽101内,受力件2受力后能够沿第一方向往复移动;扣位件3,扣位件3与受力件2配合,受力件2在第一限位槽101内沿第一方向往复移动时,受力件2促使扣位件3沿与第一方向相交的第二方向移动,并使扣位件3相对受力件2形成第一位置和第二位置。当扣位件3位于第一位置时,扣位件3能够与清洁机器人卡合连接,当扣位件3位于第二位置时,扣位件3能够与清洁机器人相脱离。
41.本技术公开了一种限位组件,包括壳体1、受力件2以及扣位件3。壳体1上设有第一限位槽101。受力件2设置在第一限位槽101内,且受力件2与第一限位槽101之间存在间隙,从而使受力件2能在第一限位槽101内往复移动。受力件2在第一限位槽101往复移动的方向定义为第一方向。受力件2在第一限位槽101内沿第一方向往复移动时,扣位件3与受力件2配合,受力件2促使扣位件3沿第二方向移动,其中第二方向与第一方向的移动轨迹相交,并且扣位件3在第二方向上移动时,相对受力件2形成第一位置和第二位置。当扣位件3位于第一位置时,扣位件3用于与清洁机器人卡合连接,当扣位件3位于第二位置时,扣位件3与清洁机器人相脱离。上述限位组件的结构设计,使受力件2移动的方向与扣位件3移动方向相交。通过上述的受力件2与扣位件3之间运动受力方向与运动方向不一致的设计,解决了对受力件2的作用力与扣位件3移动方向一致时所产生的限位组件结构占用空间大的问题。因
此本技术提供的限位组件能有效减少在清洁机器人机身内的占用空间,使清洁机器人的结构更加紧凑。另外,上述的限位组件结构简单,装配容易,方便生产,能有效降低生产成本。
42.优选地,上述的第一方向与第二方向移动轨迹相交成90
°
夹角。
43.如图3和图4所示,除上述实施例的特征以外,本实施例进一步限定了:受力件2包括扣位本体21以及第一限位部22,第一限位部22与扣位本体21连接,第一限位部22设置在扣位本体21的一侧,第一限位部22上设有第一斜面221,扣位件3上设有与第一斜面221相适配的第二斜面32,扣位本体21沿第一方向移动时,第一斜面221与第二斜面32配合带动扣位件3沿第二方向移动。
44.上述的限位组件中受力件2具体包括扣位本体21与第一限位部22,第一下位部22与扣位本体21连接,且第一限位部22设置在扣位本体21的一侧。第一限位部22上设有第一斜面221,扣位件3上设有与第一斜面221相适配的第二斜面32,第一斜面221与第二斜面32之间相互贴合配合。当受力件2在第一限位槽101内移动并挤压扣位件3时,受力件2的第一限位部22上的第一斜面221沿第一方向移动,促使与之相配合的扣位件3上的第二斜面32受力,并将第一斜面221对第二斜面32的推力分解为第一方向的作用力以及第二方向的作用力,并使扣位件3的第二斜面32沿第二方向移动,从而对扣位件3产生相对壳体1向上的位移,使扣位件3卡合于清洁机器人相应的卡合槽位上。而当受力件2对扣位件3的沿第一方向的作用力消失时,受力件2往作用力相反的方向移动,扣位件3的第二斜面32与第一斜面221配合移动,并在重力作用下扣位件3沿第二方向向下移动,从而实现扣位件3在清洁机器人的卡合槽位上退出。
45.上述的限位组件,通过受力件与扣位件之间斜面结构的相互配合对受力进行分解,实现受力件与扣位件之间作用力与运动方向不一致。上述的限位组件结构简单,生产装配简单,方便维修维护,有利于提高产品的可靠性,并延长产品使用寿命。
46.如图5所示,进一步地,限位组件还包括弹性件4,弹性件4设置在第一限位槽101内,弹性件4的一端与受力件2相抵接,弹性件4的另一端与壳体1相抵接。
47.上述的限位组件还包括弹性件4,弹性件4设置在第一限位槽101内,且弹性件4的两端分别与受力件2以及壳体1相抵接。弹性件4用于受力件2在第一限位凹槽101内的移动与复位。具体地,按压受力件2,推动受力件2受力向第一方向移动并压缩弹性件4,此时第一限位部22上的第一斜面221沿第一方向移动,并推动扣位件3的第二斜面32在第二方向向下移动,扣位件3脱离并退出清洁机器人的卡合槽。而当对受力件2的作用力消失后,受力件2在弹性件4的复位弹性的作用力下,产生第一方向的相反方向的平移,此时第一限位部22上的第一斜面221又促使扣位件3的第二斜面32在第二方向向上移动,从而使扣位件3导入清洁机器人的卡合槽内卡合。通过设置弹性件4,使限位组件中扣位件3在清洁机器人的卡合槽内的卡合与脱扣更加方便易行,提高了限位组件的使用便利性。
48.如图3和图4所示,在本实施例中,受力件2还包括第二限位部23,第二限位部23与扣位本体21连接,第二限位部23设置在扣位本体21远离第一限位部22的一侧。壳体1上还设有与第二限位部23相适配的第二限位槽102,第二限位槽102与第一限位槽101连通。弹性件4部分设置在第二限位槽102内,弹性件4远离第二限位槽102一端套设于第二限位部23上。
49.上述的限位组件,受力件2还包括第二限位部23,第二限位部23与本体21连接,且第二限位部23设置在扣位本体21远离第一限位部22的一侧。壳体1上开设有与第二限位部
23相适配的第二限位槽102,第二限位槽102与第一限位槽101连通。弹性件4部分设置在第二限位槽102内,并且弹性件4远离第二限位槽102的一端套设于第二限位部23上。上述结构中,当按压受力件2,且受力件2受力沿第一方向移动时,与受力件2的扣位本体21连接的第二限位部23进入第二限位槽102内,并继续压缩弹性件4。因此,第二限位槽102与第二限位部23相互配合,用于限制受力件2的移动轨迹,从而提高了限位组件的可靠性。
50.如图3所示,在本实施例中,扣位本体21与第一限位部22的第一斜面221围合形成第三限位槽201,扣位件3设置在第三限位槽201内。
51.上述的限位组件,扣位本体21与第一限位部22的第一斜面221围合形成第三限位槽201。扣位件3设置在第三限位槽201内,从而使受力件2对扣位件3进行限位,使受力件2沿第一方向移动时,扣位件3在第三限位槽201限位的情况下,仅能沿第二方向的移动。
52.如图1和图2所示,在本实施例中,第三限位槽201上还设有第三限位部24和第四限位部25,第三限位部24与第四限位部25在第三限位槽201内相对设置,扣位件3还设有第五限位部31,第五限位部31能分别与第三限位部24或第四限位部25相抵接。
53.上述的限位组件,第三限位槽201上还设有第三限位部24以及第四限位部25。第三限位部24与第四限位部25在第三限位槽201内相对设置。扣位件3上还设有第五限位部31,第五限位部31能分别与第三限位部24或第四限位部25相抵接,从而通过第三限位部24与第四限位部25实现对受力件2移动路径最大位移值的限制。
54.如图5、图7所示,在本实施例中,限位组件还包括定位件5,定位件5与壳体1连接形成第一限位槽101,定位件5上开设有限位通孔501,扣位件3至少部分能凸出限位通孔501。
55.上述的限位组件还包括定位件5,定位件5与壳体1连接形成第一限位槽101。定位件5上开设有限位通孔501,扣位件3至少部分能凸出限位通孔501。当使用者按压受力件2时,受力件2滑动,扣位件3受力分解为向下及向水平方向的力,在定位件5的作用下,使得扣位件3向下运动,脱离限位通孔501,使扣位件3脱扣。
56.如图6、图7所示,在本实施例中,扣位本体21上还设有第四限位槽202,壳体1上开设有与第四限位槽202连通的缺口103。
57.上述的限位组件,扣位本体21上还设置有第四限位槽202,壳体1上开设有与第四限位槽202连通的缺口103。
58.本实用新型第二方面的实施例公开了一种盒体装置,如图5至图7所示,包括盒体本体6以及如前述任意一项的限位组件,盒体本体6用于清洁机器人执行清洁作业中收集垃圾或者提供清洁介质。
59.本实用新型第二方面的实施例公开了一种盒体装置,包括盒体本体6以及前述任意一项的限位组件。盒体本体6用于清洁机器人执行清洁作业中收集垃圾或者提供清洁介质。通过设置上述任意一项限位组件,从而使限位组件占用盒体装置的容量空间小,有效改善盒体装置的结构。
60.如图5、图6、图7所示,在本实施例中,盒体装置还包括设置在盒体本体6上的连接件7,连接件7上开设有与扣位件3相适配的扣位槽701,限位组件通过扣位件3与扣位槽701配合连接固定于盒体本体6上,连接件7还用于与清洁机器人连接。
61.上述的盒体装置中还包括连接件7,连接件7上开设有与扣位件3相适配的扣位槽701。限位组件通过扣位件3与连接件7上的扣位槽701相配合进行连接并固定于盒体本体6
上,从而使限位组件装配到盒体本体6上,并通过上述的限位组件实现盒体本体6在清洁机器人上安装和拆卸。
62.本实用新型第三方面的实施例公开了一种清洁机器人,包括机身以及如前述任意一项的盒体装置;机身上开设有安装位,盒体装置安装在安装位中,并通过限位组件实现可拆卸连接。
63.本实用新型第三方面的实施例提供了一种清洁机器人盒体装置通过限位组件与机身卡扣连接限位,实现可拆卸地安装。上述的清洁机器人,通过设置前述任意一项的盒体装置,使盒体本体6占用清洁机器人的空间小,在最低成本下,解决了作用力与卡扣运动方向不一致的卡扣开关问题。另外,运用导轨对于扣位件3的约束与导向作用,通过设定不同的导轨角度与高度,可以控制扣位件3的伸缩高度及按键的行程,提高限位组件的使用灵活性。
64.进一步地,安装位开设在机身的一侧,盒体装置采用“抽屉式”设置,从机器侧面抽拉式安放或者取出。
65.进一步地,可以在安装位上的设置导轨,盒体装置上设置与导轨配合的滑块或滑轮。
66.在图示的实施方式中,盒体装置的左侧、右侧间隔地设施了两个上述的限位组件,两个限位组件的受力件2受外力后相向运动,受弹性件4弹性恢复力后相背运动。也就是说,用户只需要将两根手指深入第四限位槽202并向中间捏合,随后向后抽拉即可实现将盒体装置从清洁器人上脱扣取下。在此操作过程中,两个第四限位槽202既起到对用户手指的让位作用,又起到抽拉把手作用,方便用户抽拉取出。当清洁机器人与基站配合使用时,盒体装置侧部的两个第四限位槽202还可以与基站上的导向柱配合起到导向定位作用,使清洁机器人与基站实现精准地对接。
67.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
68.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1