真空吸尘器的制作方法
1.本公开涉及一种真空吸尘器。具体地,但不排他地,本公开涉及用于操作真空吸尘器的措施,包括方法、设备和计算机程序。
背景技术:
2.广义地说,有四种类型的真空吸尘器:“立式”真空吸尘器,“筒式”真空吸尘器(也称为“罐式”真空吸尘器),“手持式”真空吸尘器和“杆式”真空吸尘器。
3.立式真空吸尘器和筒式真空吸尘器倾向于由电源驱动。
4.手持式真空吸尘器是相对小的、高度便携的真空吸尘器,特别适合于相对低负荷的应用,例如家庭地板和室内装潢的污点清洁、汽车和船只的内部清洁等。与立式吸尘器和筒式吸尘器不同,它们被设计成在使用过程中被携带在手中,并且倾向于由电池供电。
5.杆式真空吸尘器可以包括与刚性细长抽吸棒结合的手持式真空吸尘器,该抽吸棒有效地伸到地面,使得用户在清洁地面时可以保持站立。地板工具通常附接到刚性的细长抽吸棒的端部,或者可选择地与棒的底端结合。
6.杆式真空吸尘器可以与多种可拆卸工具一起使用,以方便不同类型的清洁。此外,真空吸尘器和一些相关工具可以具有不同的设置,用户可以改变这些设置以适应不同的清洁情况。然而,对于正在进行的特定类型的清洁活动,用户有时可能使用次优的工具和/或设置。
7.本公开的目的是减轻或消除上述缺点,和/或提供一种改进的或替代的真空吸尘器。
技术实现要素:
8.根据本公开的一个方面,提供了一种真空吸尘器,包括:传感器,配置为基于感测到的真空吸尘器的运动和取向生成传感器信号;人机界面hci;以及控制器,配置为:处理所生成的传感器信号,以确定用户使用真空吸尘器执行的清洁活动的类型;并且控制hci根据所确定的清洁活动的类型向真空吸尘器的用户提供建议。
9.有利地,hci向真空吸尘器的用户提供建议,该建议取决于由控制器确定的正在执行的清洁活动的类型。以这种方式,如果用户对于正在进行的清洁任务以次优的方式操作真空吸尘器(例如,使用不正确的或次优的工具、工具设置或技术),用户将经由hci接收反馈,该反馈将提示用户重新配置真空吸尘器,以便优化清洁性能和/或电池性能。这有助于用户随着时间的推移了解真空吸尘器的特征。
10.在实施例中,hci包括视觉显示单元,并且建议包括视觉建议。
11.在实施例中,hci包括音频输出设备,并且建议包括听觉建议。
12.在实施例中,建议包括与适合于所确定的清洁活动的类型的清洁工具相关的信息。
13.在实施例中,建议包括与以下一个或多个相关的信息:冲程率、停留时间和施加的
压力,每个都适合于所确定的清洁活动的类型。
14.在实施例中,传感器信号仅基于感测到的真空吸尘器的运动或者仅基于感测到的真空吸尘器的取向。
15.在实施例中,传感器包括惯性测量单元imu。
16.在实施例中,真空吸尘器还包括清洁头,该清洁头包括搅动器和一个或多个诊断传感器,诊断传感器配置为基于感测到的清洁头的参数生成进一步的传感器信号。
17.在实施例中,控制器配置为处理生成的另外的传感器信号,以确定用户使用真空吸尘器执行的清洁活动的类型。以这种方式,当额外的传感器可用时,控制器使用额外的传感器数据来确定正在进行的清洁活动。这可以提高确定当前清洁活动的准确度和/或速度。
18.在实施例中,清洁头还包括布置成旋转搅动器的搅动器电机,感测到的清洁头的参数包括搅动器电机的电流。
19.在实施例中,感测到的清洁头的参数包括施加到清洁头的压力。
20.在实施例中,清洁头还包括可调节门,并且建议包括与适合于所确定的清洁活动的类型的可调节门的设置相关的信息。
21.在实施例中,控制器配置为通过执行预处理步骤和分类步骤来处理传感器信号。
22.在实施例中,预处理步骤包括从传感器信号的时间部分提取特征。
23.在实施例中,预处理步骤包括过滤传感器信号。
24.在实施例中,分类步骤包括使用机器学习分类器处理提取的特征。有利的是,机器学习分类器可以被预先训练,例如在工厂,通过使真空吸尘器经历多种不同的清洁活动/场景,并定义真空吸尘器在每种情况下应当如何响应。此外,机器学习分类器能够在用户的家庭环境中进一步学习。
25.在实施例中,机器学习分类器包括人工神经网络、随机森林和支持向量机中的一个或多个。
26.根据本公开的一个方面,提供了一种便于使用真空吸尘器的方法,该方法包括:基于感测到的真空吸尘器的运动和取向生成传感器信号;处理所生成的传感器信号,以确定用户使用真空吸尘器执行的清洁活动的类型;以及根据所确定的清洁活动类型向真空吸尘器的用户提供建议。
27.根据本公开的一个方面,提供了一种包括一组指令的计算机程序,当指令由计算机化设备执行时,该指令使得计算机化设备执行一种便于使用真空吸尘器的方法,该方法包括:基于感测到的真空吸尘器的运动和取向生成传感器信号;处理所生成的传感器信号,以确定用户使用真空吸尘器执行的清洁活动的类型;以及根据所确定的清洁活动的类型向真空吸尘器的用户提供建议。
28.本公开不限于任何特定类型的真空吸尘器。例如,本公开的方面可以用于立式真空吸尘器、筒式真空吸尘器或手持式或“杆式”真空吸尘器。
29.应当理解,关于本公开的一个方面描述的特征可以结合到本公开的其他方面。例如,方法的方面可以结合参考设备的方面描述的任何特征,反之亦然。
附图说明
30.现在将参考附图仅以示例的方式描述本公开的实施例,其中:
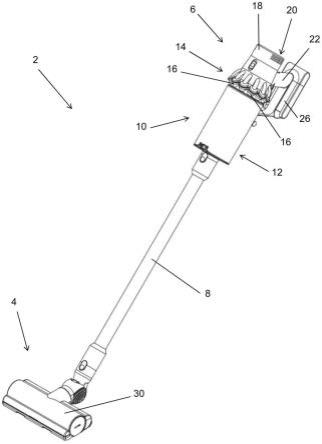
31.图1是根据本公开实施例的杆式真空吸尘器的透视图;
32.图2是图1的真空吸尘器的清洁头的视图,从下方示出;
33.图3是图1的真空吸尘器的电气部件的示意图;
34.图4是图1的杆式真空吸尘器的主体的透视图;
35.图5a和5b示出了对应于由根据本公开实施例的真空吸尘器的惯性测量单元生成的线性和角加速度的传感器信号;
36.图6和7示出了对应于由根据本公开实施例的真空吸尘器的惯性测量单元生成的取向的其他传感器信号;
37.图8是图3的真空吸尘器的电气部件的简化示意图,示出了根据本公开实施例的传感器、人机界面、电机和控制器之间的电气连接;
38.图9是示出根据本公开的各种实施例由控制器执行的示例传感器信号处理的框图;
39.图10是示出根据本公开实施例的便于使用真空吸尘器的方法的流程图;和
40.图11a和11b示意性地示出了根据本公开实施例的图1的真空吸尘器的人机界面的操作。
具体实施方式
41.图1至4示出了根据本公开实施例的真空吸尘器2。真空吸尘器2是“杆式”真空吸尘器,包括通过大致管状的细长棒8连接到主体6的清洁头4。清洁头4也可直接连接到主体6,以将真空吸尘器2转变成手持式真空吸尘器。其他可拆卸的工具,例如缝隙工具3、除尘刷7和微型电动清洁头5可以直接附接到主体6,或者附接到细长棒8的端部,以适应不同的清洁任务。
42.主体6包括灰尘分离器10,在这种情况下是旋风分离器。旋风分离器具有包括单个旋风器的第一旋风级12,和包括多个平行布置的旋风器16的第二旋风级14。主体6还具有可移除的过滤器组件18,该过滤器组件18设置有通风口20,空气可以通过通风口20从真空吸尘器2排出。真空吸尘器2的主体6具有手枪式把手22,该把手22被定位成由用户握持。在手枪式把手22的上端是触发开关24形式的用户输入装置,通常按下该触发开关以打开真空吸尘器2。然而,在一些实施例中,物理触发开关24是可选的。位于手枪式把手22下端下方的是电池组26,该电池组包括多个可充电电池27。控制器50和真空电机52,包括由电动电机驱动的风扇,设置在灰尘分离器10后方的主体6中。
43.图2中从下方示出了清洁头4。清洁头4具有外壳30,外壳30限定了抽吸室32和底板34。底板34具有抽吸开口36和轮子37,空气可以通过抽吸开口36进入抽吸室32,轮子37用于接合地板表面。外壳30限定了出口38,空气可以通过该出口38从抽吸室32进入棒8。刷棒形式的搅动器40位于抽吸室32内部。搅动器40可以由搅动器电机54驱动以在抽吸室32内旋转。该实施例的搅动器电机54接收在搅动器40内部。搅动器40具有从凹槽42伸出的刷毛43的螺旋阵列,并且被定位在抽吸室中,使得刷毛43通过抽吸开口36伸出抽吸室34。
44.图3是真空吸尘器2的电气部件的示意图。控制器50管理从电池组26的电池27到真空电机52的电力供应。当真空电机52通电时,这产生了气流,从而产生吸力。其中夹带有灰尘的空气通过抽吸开口36被吸入清洁头4(或者,当附接时,被吸入其它工具中的一个,例如
缝隙工具3、微型电动清洁头5或除尘刷7),进入抽吸室32。从那里,空气通过清洁头4的出口38被吸入,沿着棒8进入灰尘分离器10。夹带的灰尘被灰尘分离器10去除,然后相对干净的空气通过真空电机52、过滤器组件18被吸入,并通过通风口20排出真空吸尘器2。此外,控制器50还通过沿着棒的内部延伸的电线56从电池组26向清洁头4的搅动器电机54供应电力,以便旋转搅动器40。当清洁头4在硬地板上时,它由轮子37支撑,底板34和搅动器40与地板表面隔开。当清洁头4搁置在地毯表面上时,轮子37沉入地毯绒毛中,底板34(连同清洁头4的其余部分)因此定位得更低。这允许地毯纤维朝向抽吸开口36突出(并且可能穿过抽吸开口36),于是它们被旋转搅动器40的刷毛43扰动,从而从那里松开污垢和灰尘。
45.根据本公开实施例的真空吸尘器2包括附加部件,这些部件在图3和图4中可见。这些部件包括以下一个或多个:电流传感器58,用于感测由清洁头4的搅动器电机54汲取的电流;压力传感器60,用于感测施加到清洁头4的底板34的压力;惯性测量单元(imu)62,其感测真空吸尘器2的主体6的运动和取向;人机界面(hci)64;一个或多个接近传感器,通常是位于手枪式把手22中的飞行时间(tof)传感器72、工具开关传感器74和电容传感器76的形式。尽管电流传感器58被示出为位于清洁头4中,但是它也可以替代地位于主体6中。例如,电流传感器58可以集成为控制器50的一部分,只要它可操作来感测经由电线56从电池26供应到搅动器电机54的电流。在图示的实施例中,一个tof传感器72位于可拆卸棒8的端部,靠近清洁头4或其他工具3、5、7中的一个附接的位置。另外,tof传感器72可以设置在可拆卸工具3、5、7本身上。每个tof传感器72根据物体与tof传感器72的接近度生成传感器信号。合适的tof传感器72包括雷达或激光设备。工具开关传感器74位于真空吸尘器2的主体6上,并根据工具3、4、5、7或棒8是否附接到主体6来生成信号。在实施例中,工具开关传感器74根据附接到主体6或棒8的工具3、4、5、7的类型生成信号。电容传感器76位于手枪式把手22中,并根据用户是否握住手枪式把手来生成信号。在实施例中,真空吸尘器2可以包括一个或多个额外的imu。例如,清洁头4可包括imu,该imu感测清洁头4的运动和取向,并生成进一步的传感器信号,以补充由主体6的imu 62生成的信号。imu 62可以包括一个或多个加速度计、一个或多个陀螺仪和/或一个或多个磁力计。
46.如图4中更详细所示,真空吸尘器2的主体6限定了从主体6的前端9延伸到后端11的纵向轴线70。当棒8附接到主体6的前端9时,棒8平行于纵向轴线70(并且在这种情况下与纵向轴线70共线)。在图示的实施例中,hci 64包括视觉显示单元65,更具体地说,是平面的全色背光薄膜晶体管(tft)屏幕。屏幕65由控制器50控制,并从电池26接收电力。屏幕向用户显示信息,例如错误信息、真空吸尘器2工作模式的指示或电池26剩余寿命的指示。屏幕65基本面向后(即其平面基本垂直于纵向轴线70)。位于屏幕65下方(在由手枪式把手22限定的垂直取向上)的是一对控制构件66,该对控制构件66也形成hci 64的一部分,并且每个控制构件66都位于屏幕65附近,并且配置为接收来自用户的控制输入。在实施例中,控制构件配置为改变真空吸尘器的模式,例如手动增加或减少真空电机52的功率。在实施例中,hci 64还包括诸如扬声器67的音频输出设备,其可以向用户提供听觉反馈。
47.imu 62根据真空吸尘器2的主体6在三个空间维度(x、y和z)上的运动和取向生成传感器信号。该运动包括主体6的线性加速度和角加速度。图5a示出了在清洁操作之前、期间和之后对应于主体6的线性加速度的示例性生成的imu 62传感器数据。时间刻度显示了以25hz的采样率收集的样本指数。垂直刻度以重力加速度为单位。轨迹91a、91b和91c分别
对应于主体6在x、y和z取向上的线性加速度。图5b示出了在图5a所示的相同清洁操作之前、期间和之后对应于主体6的角加速度的示例性生成的imu62传感器数据。轨迹92a、92b和92c分别对应于绕x、y和z轴的角加速度。在图5a和5b中,真空吸尘器2最初是静止的(休止)。这之后是包括清洁行程的清洁时间,在一些生成的传感器数据中引起振荡行为。最后,真空吸尘器2再次返回静止状态。图5a和5b中所示的数据已经被平滑,例如通过带通滤波器或低通滤波器。图6示出了在不同的手持清洁操作期间,对应于主体6围绕y轴的取向的示例性生成的imu 62传感器数据。具体地,间隔93a对应于清洁低水平表面,例如踢脚板,间隔93b对应于主体6搁置在桌子上的时间段,间隔93c对应于清洁升高的表面,例如天花板、百叶窗、窗帘或橱柜的顶部。图7示出了在使用电动清洁头4、5的不同清洁操作期间,对应于主体6绕y轴的取向的进一步示例性生成的imu 62传感器数据。轨迹94a对应于使用附接到棒8的主清洁头4清洁家具下方。轨迹94b对应于使用直接附接到主体6的微型电动清洁头5清洁楼梯,而不使用棒8。轨迹94c对应于使用附接到棒8的清洁头4的正常立式真空清洁。应当理解,不同的清洁活动在imu 62生成的传感器数据中生成不同的特征。以这种方式,应当理解的是,imu 62传感器数据可以被处理以推断关于使用真空吸尘器的用户正在执行的清洁活动的信息,或者关于真空吸尘器正在操作的环境的信息。
48.图8示意性地示出了根据实施例的真空吸尘器2的电气布局。在实施例中,控制器50接收并处理由触发器24、电流传感器58、压力传感器60、imu62、一个或多个tof传感器72、工具开关传感器74和电容传感器76中的一个或多个生成的信号。控制器50具有存储器51,其上存储有指令,控制器50根据这些指令处理传感器信号。基于传感器信号的处理,控制器50控制真空电机52、搅动器电机54和hci 64中的一个或多个,以便增强真空吸尘器2的操作,从而改善用户体验。增强的示例包括改进的灰尘拾取和改进的电池寿命等。
49.图9是示出根据本公开的各种实施例由控制器50执行的示例传感器信号处理的框图。控制器50从一个或多个可用的传感器接收未过滤的传感器信号88。不同的实施例利用来自不同传感器的传感器信号。一些实施例利用仅来自一个传感器的传感器信号,例如imu 62。带通滤波器或低通滤波器82对原始传感器信号88进行滤波,以生成更适于进一步处理的平滑传感器信号90。在框84,从平滑的传感器信号中提取预定特征f1、f2…fn
,并随后由分类器86进行分析。在实施例中,分类器86根据提取的特征确定用户使用真空吸尘器2执行的特定清洁活动。在其他实施例中,分类器86根据提取的特征确定真空吸尘器2正在其上操作的特定表面类型。在其他实施例中,分类器86根据提取的特征确定真空吸尘器2是否正在被使用,以帮助提供无触发真空吸尘器2。已经确定了上述内容,控制器50使得涉及真空电机52、搅动器电机54和hci 64中的一个或多个的一个或多个动作被执行,这些动作根据分类器86的输出以及可选地根据触发器24的状态被配置。应当理解,过滤器82、特征提取框84和分类器86通常被实现为在控制器50上或在其控制下执行的软件模块。控制器存储器51存储定义过滤器82、特征提取84、分类器86和合成动作的操作的指令集。在实施例中,分类器基于机器学习分类器,例如人工神经网络、随机森林、支持向量机或任何其他适当的训练模型。该模型可以是预先训练好的,例如在工厂,使用监督学习方法。滑动窗口方法通常用于跨越滤波的传感器信号并提取对应于信号的特定时间部分的特征。连续的帧通常有一定程度的重叠,但通常是分开处理的。应当理解,不总是需要接收和处理来自所有可用传感器的传感器数据。例如,在实施例中,控制器50可以仅处理imu 62传感器数据以获得分类器输
出。此外,在imu 62传感器数据的情况下,控制器50可以例如仅考虑与真空吸尘器2的取向相关的imu 62传感器数据,或者仅考虑与真空吸尘器2的加速度相关的imu 62传感器数据。
50.图10是示出根据实施例的便于使用真空吸尘器2的方法200的流程图。在步骤202中,例如由imu 62生成基于感测到的真空吸尘器的运动和取向的传感器信号。在步骤204中,控制器50处理生成的传感器信号,以确定用户使用真空吸尘器2执行的清洁活动的类型。在步骤206中,根据所确定的清洁活动类型,向真空吸尘器2的用户提供建议。该建议可以采取在屏幕65上生成的视觉建议和/或在扬声器67上生成的听觉建议的形式。用户可以通过按压控制构件66之一来取消或确认该建议。在实施例中,控制器50根据上面参照图9描述的示例传感器信号处理来处理传感器信号。
51.参考图11a和11b,在实施例中,建议包括与推荐的清洁工具相关的信息,该推荐的清洁工具被认为适合于由控制器50确定的清洁活动的类型。例如,如果控制器50确定用户正在以指示缝隙清洁的方式操纵真空吸尘器,缝隙工具3的视觉表示显示在屏幕65上,可选地,伴随着在扬声器67上生成的使用缝隙工具3的听觉建议80。在图11b中,由控制器50确定的清洁活动的类型对应于楼梯清洁或室内装潢清洁。因此,微型电动工具5的视觉表示显示在屏幕65上,伴随有使用微型电动工具5的听觉建议80。在实施例中,仅当用户没有使用用于当前正在进行的清洁活动的最佳工具时,才显示建议。例如,如果用户使用除尘刷7而不是缝隙工具3进行缝隙清洁,则向用户提供使用缝隙工具3的建议。然而,如果用户已经在使用缝隙工具3,则不需要提供建议。
52.在实施例中,建议包括与推荐的清洁技术相关的信息,例如清洁冲程率、停留时间(真空吸尘器保持在特定区域上的时间长度)、施加的压力或清洁工具的配置(例如,清洁头4上的抽吸门的位置),每个都适合于由控制器50确定的清洁活动的类型。当真空吸尘器2与清洁头4一起使用时,控制器50可以基于感测到的清洁头4的参数额外地处理信号,以确定正在执行的清洁活动的类型。示例参数包括由电流传感器58感测的搅动器电机54的电流,以及由压力传感器60感测的清洁头4上的压力。
53.在本公开的实施例中,真空吸尘器2包括控制器50。控制器50配置为执行本文描述的各种方法。在实施例中,控制器包括处理系统。这种处理系统可以包括一个或多个处理器和/或存储器。如关于本文描述的任何示例所描述的每个设备、组件或功能,例如imu 62和/或hci 64可以类似地包括处理器,或者可以被包括在包括处理器的设备中。本文描述的实施例的一个或多个方面包括由设备执行的过程。在一些示例中,该装置包括配置为执行这些过程的一个或多个处理器。在这点上,实施例可以至少部分地通过存储在(非暂时性)存储器中并且可由处理器执行的计算机软件、或者通过硬件、或者通过有形存储的软件和硬件(以及有形存储的固件)的组合来实现。实施例还扩展到计算机程序,特别是载体上或载体中的计算机程序,适于将上述实施例付诸实践。该程序可以是非暂时性源代码、目标代码的形式,或者是适于在根据实施例的过程的实现中使用的任何其他非暂时性形式。载体可以是能够承载程序的任何实体或设备,例如ram、rom或光学存储设备等。
54.处理系统的一个或多个处理器可以包括中央处理单元(cpu)。一个或多个处理器可以包括图形处理单元(gpu)。一个或多个处理器可以包括现场可编程门阵列(fpga)、可编程逻辑器件(pld)或复杂可编程逻辑器件(cpld)中的一个或多个。一个或多个处理器可以包括专用集成电路(asic)。本领域技术人员将理解,除了所提供的示例之外,许多其他类型
的设备可以用于提供一个或多个处理器。一个或多个处理器可以包括多个协同定位的处理器或多个不同定位的处理器。由一个或多个处理器执行的操作可以由硬件、固件和软件中的一个或多个来执行。应当理解,处理系统可以包括比所描述的更多、更少和/或不同的组件。
55.本文描述的技术可以用软件或硬件来实现,或者可以使用软件和硬件的组合来实现。它们可以包括配置设备来执行和/或支持本文描述的任何或所有技术。尽管本文参考附图描述的示例的至少一些方面包括在处理系统或处理器中执行的计算机过程,但是本文描述的示例也扩展到计算机程序,例如载体上或载体中的计算机程序,适于将示例付诸实践。载体可以是能够承载程序的任何实体或设备。载体可以包括计算机可读存储介质。有形计算机可读存储介质的示例包括但不限于光学介质(例如,cd-rom、dvd-rom或蓝光)、闪存卡、软盘或硬盘或能够在至少一个rom或ram或可编程rom(prom)芯片中存储诸如固件或微码的计算机可读指令的任何其他介质。
56.在前面的描述中,提到了具有已知的、显而易见的或可预见的等同物的整体或元件,那么这些等同物被结合在此,如同被单独阐述一样。应当参考权利要求来确定本公开的真实范围,其应当被解释为包括任何这样的等同物。读者还将理解,被描述为优选、有利、方便等的本公开的整体或特征是可选的,并且不限制独立权利要求的范围。此外,应当理解,这些可选的整体或特征虽然在本公开的一些实施例中可能是有益的,但在其他实施例中可能是不期望的,因此可能是不存在的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1