一种具有自动翻转的人工智能扫地机器人
1.本发明涉及智能机器人领域,特别涉及一种具有自动翻转的人工智能扫地机器人。
背景技术:
2.扫地机器人是目前较为流行的家电之一,具有能够在室内进行自动吸尘的功能,且在运行的时候,通过自身携带的电动毛刷将地面上的灰尘扬起,在通过自身携带的吸尘器将扬起的灰尘吸入,从而达到自动扫地吸尘的目的。但是,在将扫地机器人使用了较长的时间之后,扫地机器人底部的电动毛刷由于长期的使用而变得扬起灰尘的时候受阻,使得不能将地面的灰尘全部扬起,因此在使用扫地机器人的时候,需要定期的对扫地机器人底部的电动毛刷进行拆卸和更换,这样从而使得扫地机器人可能更好的进行工作。
技术实现要素:
3.本发明的目的是克服上述现有技术中存在的问题,提供一种具有自动翻转的人工智能扫地机器人,通过在扫地机器人的顶面和地面分别设置一组电动毛刷,在需要进行更换的时候,将扫地机器人自动翻转,从而使得扫地机器人在扫地的时候,使用全新的电动毛刷,将地面清扫干净。
4.为此,本发明提供一种具有自动翻转的人工智能扫地机器人,包括机体,所述机体的下面设置有一组清理组件,所述清理组件包括两个电动毛刷和吸尘口,所述机体的上面也对称设置有一组清理组件,所述机体上还设置有:滚珠,围绕所述吸尘口均匀分布,用于在路面上滚动;推进器,分别设置在所述机体的上下两面的非中心处;颜色传感器,分别设在所述电动毛刷的两侧,两个所述颜色传感器所连成的直线与两个所述电动毛刷所连成的直线垂直且相交,用于检测地面的颜色;处理器,用于在设定的间隔时间依次接收机体同一面上的两个颜色传感器检测到的颜色,计算两个颜色的差值,当两个颜色的差值小于设定的数值的时候,控制该面上的所述推进器推动使得机体翻转,之后,控制另一面的所述清理组件工作;电源,用于给所述推进器、颜色传感器以及清理组件提供供电。
5.进一步,还包括:若干个纵向的滑槽,沿机体的侧面均匀分布,滑槽上滑动连接有滑块,滑块上设置有用于在路面上滚动的滚轮,所述滚轮通过滚动驱动器驱动,所述滑槽的两端分别设置有一第一电磁铁,所述滑块的侧面分别设置有一第二电磁铁,所述第一电磁铁与所述第二电磁铁相对;两个环形的滑轨,每一个所述滑轨分别设置在机体上下两面的一面上,每一个滑轨分别与所述电动毛刷的底座滑动连接,所述电动毛刷通过滑动驱动器驱动其在所述滑轨上的运动;两个圆环,每一个所述圆环分别贴合的设置在同一面的所述滑轨上,所述电动毛刷位于所述圆环上,所述颜色传感器对称设置在所述圆环上;所述处理器,用于在所述机体翻转之后,控制所述第一电磁铁和所述第二电磁铁之间的磁性消失,待所述滚轮在重力的作用下下落之后,控制所述所述第一电磁铁和所述第二电磁铁之间的磁性产生;还用于根据所述机体要移动的位置,通过控制所述滚动驱动器使得对应方向上的
滚轮转动,同时控制所述滑动驱动器使得所述电动毛刷移动到所述的转动的滚轮的方向。
6.进一步,所述机体同一面上的两个所述电动毛刷之间连接有连接杆,所述连接杆用于限定两个所述电动毛刷之间的相对位置。
7.更进一步,所述连接杆为空心结构,所述连接杆背向所述机体的一面开设有通口,所述推进器设置在所述连接杆内,所述推进器在推进的时候穿过所述通口。
8.更进一步,所述推进器包括:推板,其大小形状与所述通口相一致,用于封闭所述通口;第三电磁铁,固定设置在所述推板的下面;第四电磁铁,固定设置在所述连接杆的内部,与所述第三电磁铁相对设置;弹簧,用于连接所述推板和所述连接杆;处理器,还用于在推进器推进的时候,控制所述第三电磁铁和所述第四电磁铁之间产生瞬间的斥力,持续设定的时间之后,控制所述第三电磁铁和所述第四电磁铁产生磁力。
9.进一步,还包括两个自动缓冲垫,每一个所述自动缓冲垫分别设置在机体上下两面的一面上;处理器,还用于在机体翻转的同时,控制与原本位于机体上面的所述自动缓冲垫弹出,待机体平稳后,控制该自动缓冲垫回收。
10.更进一步,所述机体的上下表面分别开设有一个环形的凹槽,所述自动缓冲垫均匀位于所述凹槽的内部。
11.更进一步,所述自动缓冲垫包括:环形的支撑板,水平的设置在所述凹槽的内部,其上表面设置有软垫,在弹出的时候,所述软垫穿过所述凹槽的槽口;第五电磁铁,设置在所述支撑板的下表面;第六电磁铁,设置在所述凹槽的槽底,与所述第五电磁铁相对设置;处理器,还用于在控制所述自动缓冲垫弹出的时候,控制所述第五电磁铁和所述第六电磁铁之间产生斥力,在控制所述自动缓冲垫回收的时候,控制所述第五电磁铁和所述第六电磁铁之间产生磁力。
12.进一步,所述机体每一面上的滚珠均有三个,三个所述滚珠围绕所述吸尘口均匀分布。
13.进一步,所述吸尘口与集尘盒连通,所述集尘盒位于所述机体内部并且可拆卸。
14.本发明提供的一种具有自动翻转的人工智能扫地机器人,具有如下有益效果:
15.本发明通过在扫地机器人的顶面和地面分别设置一组电动毛刷,在需要进行更换的时候,将扫地机器人自动翻转,从而使得扫地机器人在扫地的时候,使用全新的电动毛刷,将地面清扫干净,同时,使用人员可以看见扫地机器人上方的电动毛刷,就会及时更换;
16.本发明通过设置多个方向的滚轮,使得起到万向轮的作用,同时具有移动支撑的滚珠,可以使得扫地机器人的正常移动,在扫地机器人翻转之后,同时利用重力的作用改变滚轮的位置方向,使得扫地机器人的方向滚轮的数量仅仅具有一个,能够在批量生产的时候,节省物料的成本;
17.本发明使用电磁的方式实现扫地机器人的翻转,这样使得在翻转的时候能够顺利的完成翻转的动作,同时在翻转之后,使得扫地机器人的表面光滑,不会影响后续对于扫地工作的正常进行。
附图说明
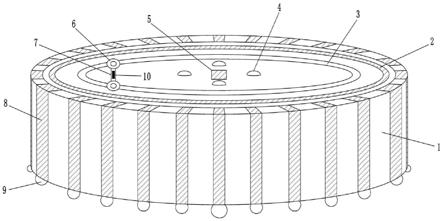
18.图1为本发明的整体结构示意图;
19.图2为本发明的俯视结构示意图;
20.图3为本发明的推进器的结构示意图;
21.图4为本发明在翻转时候的示意图;
22.图5为本发明机体边缘的结构示意图。
23.附图标记说明:
24.1、机体;2、自动缓冲垫;2-1、软垫;2-2、凹槽;2-3、支撑板;2-4、第五电磁铁;2-5、第六电磁铁;3、滑轨;4、滚珠;5、吸尘口;6、电动毛刷;7、连接杆;8、滑槽;9、滚轮;10、推进器;10-1、推板;10-2、通口;10-3、第三电磁铁;10-4、第四电磁铁;10-5、弹簧;11、滑块;12、第二电磁铁;13、第一电磁铁。
具体实施方式
25.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
26.在本技术文件中,未经明确的部件型号以及结构,均为本领域技术人员所公知的现有技术,本领域技术人员均可根据实际情况的需要进行设定,在本技术文件的实施例中不做具体的限定。
27.具体的,如图1-5所示,本发明实施例提供了一种具有自动翻转的人工智能扫地机器人,包括机体1,所述机体1的下面设置有一组清理组件,所述清理组件包括两个电动毛刷6和吸尘口5。同时,机体1内还设置有处理器和电源。
28.清理组件中的电动毛刷6在电源的供电下,通过转动的方式进行工作,其主要作用是将地面的灰尘扬起;吸尘口5的作用是将电动毛刷6所扬起的灰尘进行吸收,是吸尘器的部分,吸尘器是内置在机体1中的,在本发明中,由于机体1的遮挡,电动毛刷6所扬起的灰尘位于机体1的底部,正好被吸尘口5所吸入。
29.清理组件是现有扫地机器人的部件,下面是本发明充分利用现有技术的特点,对于现有产品的改进,在所述机体1的上面也对称设置有一组清理组件,所述机体1上还设置有滚珠4、推进器10以及颜色传感器,下面对各个部件的位置和其联动关系进行详细的介绍。
30.滚珠4,围绕所述吸尘口5均匀分布,用于在路面上滚动;滚珠4的作用是用于支撑机体1在路面上滚动,使用滚珠4可以起到万向跟随滚动的作用,相对于现有的扫地机器人转向更加的灵活。
31.推进器10,分别设置在所述机体1的上下两面的非中心处;推进器10是用来将机体1进行翻转的,即是将机体1的上下两面翻转过来,将已经工作完成的电动毛刷6翻转到上方并停止工作,使得使用者可以看见电动毛刷6的干净程度。
32.颜色传感器,分别设在所述电动毛刷6的两侧,两个所述颜色传感器所连成的直线与两个所述电动毛刷6所连成的直线垂直且相交,用于检测地面的颜色;颜色传感器是用来检测地面的颜色的,在地面需要当相对的两个颜色传感器所检测到的地面的颜色具有色差的时候,将说明清扫的干净,反之,则清扫的不干净,在本发明中,电动毛刷6位于颜色传感器所组成的之间,从而使得检测到的颜色差值反应出清扫的效果。
33.处理器,用于在设定的间隔时间依次接收机体1同一面上的两个颜色传感器检测到的颜色,计算两个颜色的差值,当两个颜色的差值小于设定的数值的时候,控制该面上的
所述推进器10推动使得机体1翻转,之后,控制另一面的所述清理组件工作;本发明的处理器根据颜色传感器检测的颜色,判断是否需要翻转机体1,使得正在工作的电动毛刷6停止工作并位于机体1的上方,通过直观的显示提示使用者更换,在进行翻转的时候,推进器10推动,使得机体1翻转,之后控制翻转后位于下方的所述电动毛刷6继续工作。为了清楚的判断工作的面上的电器,可以使用陀螺仪判断翻转的角度,从判断位于机体1下方的面,一个面的电子部件可以使用同一条电路控制。另外,本发明的电源用于供电,为本发明的所有电子部件进行供电,电子部件包括但不限于所述推进器10、颜色传感器以及清理组件。
34.本发明对于路线的规划和导航等部件,不在本发明的讨论范围之后,使用的是现有技术,本发明仅仅是对于使用时候所产生的由于电动毛刷6长时间不更换所产生的清扫不干净的问题。
35.本发明的产品在使用的时候,由于颜色传感器检测到的地面的颜色,根据所检测到的颜色的色差得到地面是否干净,当地面清扫不能达到设定的标准的时候,使用推动器将机体1进行翻面,使得干净的电动毛刷6对地面进行清洁,一方面可以使得清洁的效率提升,另一方面可以使得使用者在进行使用的时候,直观的看见位于机体1上表面的毛刷的干净程度,并且及时的进行更换,依次往复,得到一个良好的清洁效果。
36.在本发明的实施例中,还包括:若干个纵向的滑槽8、两个环形的滑轨3以及两个圆环。其中,两个环形的滑轨3和两个圆环也是分别设置在机体1的上下两面的。其工作和功能如下:
37.若干个纵向的滑槽8,沿机体1的侧面均匀的分布,滑槽8上滑动连接有滑块11,滑块11上设置有用于在路面上滚动的滚轮9,所述滚轮9通过滚动驱动器驱动,所述滑槽8的两端分别设置有一第一电磁铁13,所述滑块11的侧面分别设置有一第二电磁铁12,所述第一电磁铁13与所述第二电磁铁12相对;本发明将现有扫地机器人的移动的驱动通过滚轮9完成,在进行移动的时候,本发明依据扫地机器人的定位导航系统的指令的得到要前进的方向,并且根据要前进的方向,控制对应方向的滚轮9滚动,从而达到移动的效果。
38.两个环形的滑轨3,每一个所述滑轨3分别设置在机体1上下两面的一面上,每一个滑轨3分别与所述电动毛刷6的底座滑动连接,所述电动毛刷6通过滑动驱动器驱动其在所述滑轨3上的运动;电动毛刷6的位置根据机体1要前进的方向确定,即距离被滚动驱动器驱动的滚轮9最近,这样可以起到最好的清洁效果。
39.两个圆环,每一个所述圆环分别贴合的设置在同一面的所述滑轨3上,所述电动毛刷6位于所述圆环上,所述颜色传感器对称设置在所述圆环上;这样就可以使得通过两个颜色传感器对地面进行检测,同时,将电动毛刷6和颜色传感器的位置进行固定,结合上述的结构,本发明的两个电动毛刷6和两个颜色传感器相邻间隔设置。
40.所述处理器,用于在所述机体1翻转之后,控制所述第一电磁铁13和所述第二电磁铁12之间的磁性消失,待所述滚轮9在重力的作用下下落之后,控制所述所述第一电磁铁13和所述第二电磁铁12之间的磁性产生;还用于根据所述机体1要移动的位置,通过控制所述滚动驱动器使得对应方向上的滚轮9转动,同时控制所述滑动驱动器使得所述电动毛刷6移动到所述的转动的滚轮9的方向。处理器机体1在翻转之后,控制所述第一电磁铁13和所述第二电磁铁12之间的磁性消失,待所述滚轮9在重力的作用下下落之后,控制所述所述第一电磁铁13和所述第二电磁铁12之间的磁性产生,从而使得在翻转之后,滚轮9再次支撑机体
1,同时结合机体1要移动的位置,要移动的位置是根据内部的定位导航得到,由处理器进行获取,即是机体1要移动的方位信息,使得电动毛刷6移动到所述的转动的滚轮9的方向,从而使得清扫的效率更高。
41.在本发明的实施例中,具有两个电动毛刷6,为了将两个电动毛刷6的位置进行相对的固定,在所述机体1同一面上的两个所述电动毛刷6之间连接有连接杆7,所述连接杆用于限定两个所述电动毛刷6之间的相对位置。
42.作为优选的,本发明将推动器10集成在连接杆7中,从而不占用本产品的其他位置,即所述连接杆7为空心结构,所述连接杆7背向所述机体1的一面开设有通口10-2,所述推进器10设置在所述连接杆7内,所述推进器10在推进的时候穿过所述通口10-2。
43.作为优选的,所述推进器10包括:推板10-1、第三电磁铁10-3、第四电磁铁10-4以及弹簧10-5。其中,推板10-1的大小形状与所述通口10-2相一致,用于封闭所述通口10-2,防止在不进行翻转机体1的时候,地面扬起的灰尘进入连接杆7的内部;第三电磁铁10-3固定设置在所述推板10-1的下面,位于所述推板10-1的正下方,从而达到最大的推动效果;第四电磁铁10-4固定设置在所述连接杆7的内部,与所述第三电磁铁10-3相对设置,,从而达到最大的推动效果;弹簧10-5用于连接所述推板10-1和所述连接杆7,用于在翻转完成的时候,复位推板10-1的位置;处理器,在推进器10推进的时候,控制所述第三电磁铁10-3和所述第四电磁铁10-4之间产生瞬间的斥力,持续设定的时间之后,控制所述第三电磁铁10-3和所述第四电磁铁10-4产生磁力。
44.上述技术方案中,在机体1翻转的时候,通过电磁的技术手段完成对于机体1的翻转,在本发明中,使用电磁的技术手段,不但可以实现控制机体1翻转的力度,即是控制第三电磁铁10-3和第四电磁铁10-4的磁性大小,从而控制机体1翻转的力度,同时,本发明使用电磁手段,还可以有效的产品的使用空间,将产品做小,满足用户日常的需求,即是在不减小产品的技术效果的情况下,减小产品的空间,最大的满足用户的需求。
45.在本发明的实施例中,还包括两个自动缓冲垫2,每一个所述自动缓冲垫2分别设置在机体1上下两面的一面上;处理器在机体1翻转的同时,控制与原本位于机体1上面的所述自动缓冲垫2弹出,待机体1平稳后,控制该自动缓冲垫2回收。
46.上述,本发明通过自动缓冲垫2来环节在翻转时候对于机体1着地时候的撞击,在本发明的实施例中,自动缓冲垫2可以使用压缩海绵的材质,仅仅是在翻转机体1的时候将自动缓冲垫2弹出,待机体1平稳后,控制该自动缓冲垫2回收,这样不会在清扫地面的时候,自动缓冲垫2对清扫产生障碍,也可以使得产品表面外观平整美观。
47.作为优选的,为了将自动缓冲垫2进行完美的隐藏,使得在不产生作用的时候不显现出来,所述机体1的上下表面分别开设有一个环形的凹槽2-2,所述自动缓冲垫2均匀位于所述凹槽2-2的内部。
48.作为优选的,所述自动缓冲垫2包括:环形的支撑板2-3、第五电磁铁2-4以及第六电磁铁2-5。其中,环形的支撑板2-3水平的设置在所述凹槽2-2的内部,其上表面设置有软垫2-1,在弹出的时候,所述软垫2-1穿过所述凹槽2-2的槽口;第五电磁铁2-4设置在所述支撑板2-3的下表面;第六电磁铁2-5,设置在所述凹槽2-2的槽底,与所述第五电磁铁2-4相对设置;处理器在控制所述自动缓冲垫2弹出的时候,控制所述第五电磁铁2-4和所述第六电磁铁2-5之间产生斥力,在控制所述自动缓冲垫2回收的时候,控制所述第五电磁铁2-4和所
述第六电磁铁2-5之间产生磁力。
49.本发明的自动缓冲垫2也通过电磁的方式进行释放和回收,有限的减小可自动缓冲垫2的空间利用,提升了自动缓冲垫2的空间利用率,其中,软垫2-1可以使用具有柔性的材料,例如压缩海绵。
50.在本发明的实施例中,为了使得滚珠4对机体1的良好稳定支撑,所述机体1每一面上的滚珠4均有三个,三个所述滚珠4围绕所述吸尘口5均匀分布。
51.同时,在本发明的实施例中,所述吸尘口5与集尘盒连通,所述集尘盒位于所述机体1内部并且可拆卸,从而使得在对集尘盒清理的时候,直接将集尘盒拆卸,使用者使用的时候更加的方便。
52.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1