烹饪设备的清洗控制方法和烹饪设备与流程
1.本发明涉及家用电器技术领域,尤其涉及一种烹饪设备的清洗控制方法和一种烹饪设备。
背景技术:
2.随着科技的发展,越来越多的工作可以交给机器完成,例如可以使用烹饪设备代替人工来烹饪美食。烹饪设备中的搅拌铲是依靠电机带动进行旋转或者上下移动,以对食材进行搅拌达到翻炒的目的。烹饪设备有自清洁功能,在完成烹饪之后,会自动加液清洗,烹饪设备可以清洗到锅盖和锅体,由于锅铲上部的位置特殊,使得烹饪设备加水时,水无法锅铲上部停留,因此无法清洁搅拌铲的上部,烹饪设备不能实现全面清洁,影响用户体验。因此一般的烹饪设备的清洗控制方案已不再适用,亟需一种能清洁搅拌铲的上部的方案。
技术实现要素:
3.本发明实施例提供一种烹饪设备的清洗控制方法、锅盖和烹饪设备,用以实现解决现有技术中由于锅铲上部的位置特殊,使得烹饪设备加水时,水无法锅铲上部停留,无法清洁搅拌铲的上部。
4.根据本技术实施例的第一方面,提供了一种烹饪设备的清洗控制方法,所述方法应用于烹饪设备,所述烹饪设备包括锅盖、搅拌组件、加料组件和锅体组件;所述锅盖具有投料口,所述搅拌组件包括传动盒以及连接在所述传动盒上的搅拌铲,所述传动盒被构造为相对于锅盖转动;
5.所述清洗控制方法包括:
6.控制所述搅拌组件转动至使所述传动盒面向所述锅盖内壁的端面运动位于投料口下方的位置;
7.控制加料组件通过所述投料口向锅体组件内泵入液体,至少部分从所述投料口流出的液体经所述传动盒流向锅体组件内。
8.在本公开一个实施方式中,所述搅拌铲转动连接在所述传动盒上;所述搅拌铲在所述传动盒上的转动轴线与所述传动盒的转动轴线之间具有预定的距离。
9.在本公开一个实施方式中,在所述控制加料组件通过所述投料口向锅体组件内泵入液体,至少部分从所述投料口流出的液体经所述传动盒流向锅体组件内的步骤之后,还包括对锅体组件进行清洁的步骤。
10.在本公开一个实施方式中,控制所述搅拌组件转动至使所述传动盒面向所述锅盖内壁的端面运动位于投料口正下方的位置。
11.在本公开一个实施方式中,所述搅拌铲中设置有磁体,所述锅盖中设置有霍尔电压检测装置,在控制加料组件通过所述投料口向锅体组件内泵入液体的步骤之前还包括:
12.获取所述霍尔电压检测装置输出的霍尔电压信号;
13.若所述霍尔电压满足预设条件则确定所述传动盒面向所述锅盖内壁的端面位于
所述投料口下方。
14.在本公开一个实施方式中,所述霍尔电压检测装置设置在与投料口对应的位置上,所述确定所述传动盒面向所述锅盖内壁的端面位于所述投料口下方,包括:
15.根据预设采样周期,采集所述霍尔电压检测装置输出的多个霍尔电压采样信号;
16.在所述多个霍尔电压采样信号满足预设条件的情况下,则确定所述传动盒的端面位于投料口下方。
17.在本公开一个实施方式中,所述在所述多个霍尔电压采样信号满足预设条件的情况下,则确定所述传动盒面向所述锅盖内壁的端面位于投料口下方,包括:
18.若所述多个霍尔电压采样信号中存在大于或者等于第一预设阈值的霍尔电压采样信号,则确定所述传动盒的端面位于投料口下方。
19.在本公开一个实施方式中,所述在所述多个霍尔电压采样信号满足预设条件的情况下,确定所述传动盒面向所述锅盖内壁的端面位于投料口下方,包括:
20.在所述多个霍尔电压采样信号的变化趋势满足趋势条件的情况下,则确定所述传动盒的端面位于投料口下方。
21.在本公开一个实施方式中,所述在所述多个霍尔电压采样信号的变化趋势满足趋势条件的情况下,则确定所述传动盒面向所述锅盖内壁的端面位于投料口下方,包括:
22.若所述多个霍尔电压采样信号随采样周期依次增大之后降低,则确定所述传动盒的端面位于投料口下方。
23.在本公开一个实施方式中,所述在所述多个霍尔电压采样信号的变化趋势满足趋势条件的情况下,则确定所述传动盒面向所述锅盖内壁的端面位于投料口下方,还包括:
24.若所述多个霍尔电压采样信号随采样周期依次降低之后增大,则确定所述传动盒的端面位于投料口下方。
25.在本公开一个实施方式中,所述在所述多个霍尔电压采样信号的变化趋势满足趋势条件的情况下,则确定所述传动盒面向所述锅盖内壁的端面位于投料口下方,包括:
26.若所述多个霍尔电压采样信号中的第一霍尔电压采样信号、第二霍尔电压采样信号和第三霍尔电压采样信号满足下述条件,则确定所述传动盒的端面位于投料口下方,其中,所述第三霍尔电压采样信号为所述多个霍尔电压采样信号中最后一个采集的霍尔电压采样信号:
27.所述第一霍尔电压采样信号和获取的最小霍尔电压信号之间的第一差值大于第一预设霍尔电压信号,且所述第一差值小于第二预设霍尔电压信号;
28.所述第二霍尔电压采样信号和所述最小霍尔电压信号之间的第二差值大于所述第二预设霍尔电压信号,且所述第二差值小于第三预设霍尔电压信号;
29.所述第三霍尔电压采样信号和所述最小霍尔电压信号之间的第三差值大于所述第三预设霍尔电压信号;
30.其中,所述第一预设霍尔电压信号小于所述第二预设霍尔电压信号,所述第二预设霍尔电压信号小于所述第三预设霍尔电压信号。
31.在本公开一个实施方式中,所述若所述多个霍尔电压采样信号的变化趋势满足趋势条件,则确定所述传动盒面向所述锅盖内壁的端面位于投料口下方,包括:
32.若所述多个霍尔电压采样信号中的第四霍尔电压采样信号、第五霍尔电压采样信
号和第六霍尔电压采样信号满足下述条件,则确定所述传动盒的端面位于投料口下方,其中,所述第六霍尔电压采样信号为所述多个霍尔电压采样信号中最后一个获取的霍尔电压采样信号:
33.所述第四霍尔电压采样信号和获取的最大霍尔电压信号之间的第四差值大于第四预设霍尔电压信号;
34.所述第五霍尔电压采样信号和所述最大霍尔电压信号之间的第五差值大于第五预设霍尔电压信号,且所述第五差值小于所述第四预设霍尔电压信号;
35.所述第六霍尔电压采样信号和所述最大霍尔电压信号之间的第六差值大于第六预设霍尔电压信号,且所述第六差值小于所述第五预设霍尔电压信号;
36.其中,所述第四预设霍尔电压信号大于所述第五预设霍尔电压信号,所述第五预设霍尔电压信号大于所述第六预设霍尔电压信号。
37.在本公开一个实施方式中,所述根据所述霍尔电压信号确定所述传动盒面向所述锅盖内壁的端面位于投料口下方,所述搅拌铲位于原点位置。
38.根据本技术的第二方面,还提供了一种烹饪设备,所述烹饪设备包括锅盖、搅拌组件、加料组件和锅体组件;所述锅盖具有投料口,所述搅拌组件包括传动盒以及连接在所述传动盒上的搅拌铲,所述传动盒被构造为相对于锅盖转动;
39.还包括处理器,所述处理器被配置为控制所述搅拌组件转动至使所述传动盒面向所述锅盖内壁的端面运动位于投料口下方的位置之后;再控制加料组件通过所述投料口向锅体组件内泵入液体,至少部分从所述投料口流出的液体经所述传动盒流向锅体组件内。
40.根据本技术的第三方面,提供了一种烹饪设备,所述烹饪设备包括锅盖、搅拌组件、加料组件和锅体组件;所述锅盖具有投料口,所述搅拌组件包括传动盒以及连接在所述传动盒上的搅拌铲,所述传动盒被构造为相对于锅盖转动;还包括处理器,所述处理器用于:所述传动盒面向所述锅盖内壁的端面位于所述投料口下方时,则控制所述烹饪设备通过所述投料口加液以对所述搅拌组件的端面进行清洁。
41.采用本发明的控制方法,可使传动盒的端面转动至与所述投料口对应的位置,使得从投料口流出的液体可以经传动盒的端面流向锅体内,以使难以清洗的传动的端面得到清洁,烹饪设备实现全面清洁,提高了用户体验。
附图说明
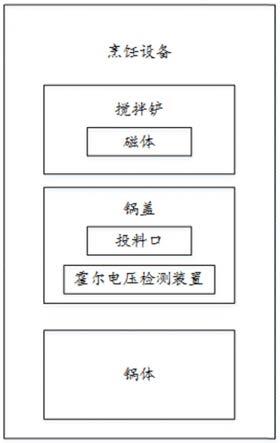
42.图1为本发明实施例提供的一种烹饪设备的结构示意图;
43.图2为本发明实施例提供的一种烹饪设备的清洗控制方法的流程图示意图;
44.图3为本发明实施例提供的一种霍尔电压检测装置和处理器之间的连接关系示意图;
45.图4为本发明实施例提供的一种主控电路的电路原理示意图;
46.图5为本发明实施例提供的一种霍尔电压检测装置的电路原理示意图;
47.图6为本发明实施例提供的一种霍尔电压采样信号的波形示意图;
48.图7为本发明实施例提供的另一种霍尔电压采样信号的波形示意图;
49.图8为本发明实施例提供的另一种霍尔电压采样信号的波形示意图;
50.图9为本发明实施例提供的另一种霍尔电压采样信号的波形示意图;
51.图10为本发明实施例提供的锅盖的结构示意图;
52.图11为本发明实施例提供的一种锅盖的结构示意图;
53.图12为本发明实施例提供的一种烹饪设备的结构示意图。
54.图13至图15是本公开实施例三的结构示意图。
55.图16是本公开实施例一的结构示意图。
具体实施方式
56.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
57.在本发明实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。在本发明实施例和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义,“多种”一般包含至少两种。
58.取决于语境,如在此所使用的词语“如果”、“若”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”或“响应于检测”。类似地,取决于语境,短语“如果确定”或“如果检测(陈述的条件或事件)”可以被解释成为“当确定时”或“响应于确定”或“当检测(陈述的条件或事件)时”或“响应于检测(陈述的条件或事件)”。
59.另外,下述各方法实施例中的步骤时序仅为一种举例,而非严格限定。
60.实施例1
61.本发明实施例提供一种烹饪设备的清洗控制方法,该方法可以应用于烹饪设备。参考图16,烹饪设备可以包括锅盖13、搅拌组件、加料组件(视图未给出)和锅体组件14;锅盖13具有投料口,搅拌组件包括传动盒11以及连接在传动盒11上的搅拌铲12,传动盒11被构造为相对于锅盖13转动。传动盒11位于锅盖13的下方,且转动连接在悬臂上,使得传动盒11整体可以相对于锅盖13转动。搅拌铲12转动连接在传动盒11中,使得搅拌铲12可以相对于传动盒11转动。传动盒11中设置有驱动搅拌铲12转动的传动装置,且搅拌铲12的转动轴线与传动盒的转动轴线之间具有预定的距离,因此传动盒需要一定的空间来安装传动装置。
62.锅盖13上设置有投料口,使得加料组件可以通过该投料口将调料或清水泵入到锅体组件14中,以进行投料或者清洗锅体组件。
63.本公开的清洗控制方法包括:控制所述搅拌组件转动至使所述传动盒面向所述锅盖内壁的端面运动位于投料口下方的位置;控制加料组件通过所述投料口向锅体组件内泵入液体,至少部分从所述投料口流出的液体经所述传动盒流向锅体组件内。将传动盒转动至与投料口对应的位置后,液体从投料口流向传动盒的端面,并沿着传动盒的侧壁最终流入到锅体组件内,由此完成了对传动盒的清洗。
64.在本公开一个实施方式中,可在控制加料组件通过所述投料口向锅体组件内泵入液体,至少部分从所述投料口流出的液体经所述传动盒流向锅体组件内的步骤之后,还包括对锅体组件进行清洁的步骤。也就是说,烹饪完成后,在对锅体组件进行清洁时,需要通过投料口往锅体组件内泵入清水,在清水流入之前,可将传动盒转动至与投料口对应的位
置,由此泵入锅体组件内的清水可以流经传动盒,从而实现了对传动盒的清洗。
65.在本公开一个实施方式中,可以控制搅拌组件转动至使传动盒面向所述锅盖内壁的端面运动位于投料口正下方的位置,从而可以保证投料口流出的液体流向端面的中心区域,液体经其端面可以流向传动盒的四周侧壁,从而可以对整个传动盒进行清洗。
66.在本公开一个实施方式中,搅拌组件还包括固定在传动盒11上的辅助铲15,辅助铲15在随着传动盒11转动的过程中,可以对食材进行翻炒。同样的,搅拌铲12在自转的过程中也可以对食材进行翻炒。在自清洁模式下,搅拌铲12和辅助铲15还可以对锅体组件和锅盖13进行清洁。传动盒11相对于锅盖13不但可以转动,而且通过升降装置驱动搅拌组件至少在第一位置和第二位置之间运动。
67.当搅拌组件处于第一位置时,搅拌组件与锅盖的内壁贴合接触;在转动装置的驱动下,搅拌组件能够在第一位置对锅盖的内壁进行清洁;当所搅拌组件处于第二位置时,搅拌组件与锅盖的内壁脱离接触。示例性的,第一位置可以是搅拌组件上升的最高位置,第二位置可以是搅拌组件下降的最低位置。当搅拌组件处于第二位置时,搅拌铲12与锅体14的内壁面间隙配合或过盈配合,辅助铲15与锅体的底面间隙配合或过盈配合。
68.具体地,例如可以在搅拌铲12的相应位置设置弹性部120,弹性部120具有面向锅体的内侧壁的倾斜面,且弹性部120被构造为通过该倾斜面与锅体的内侧壁过盈配合过盈配合,从而完成对锅体内壁的清洁。相应的辅助铲15也可设置相应的弹性部120,以对锅盖13进行清洁,或者同时对锅盖13的内壁以及锅体的部分侧壁进行清洁。
69.实施例2
70.在本公开一个实施方式中,搅拌铲中设置有磁体,锅盖具有投料口和霍尔电压检测装置。其中,霍尔电压检测装置可以用于根据磁体相对于霍尔电压检测装置的距离变化输出对应的霍尔电压信号。
71.图2为本发明实施例提供的一种烹饪设备的清洗控制方法的流程图,如图2所示,该方法包括如下步骤:
72.201、获取霍尔电压检测装置输出的霍尔电压信号。
73.202、响应于根据所述霍尔电压信号确定传动盒面向锅盖内壁的端面位于投料口下方,控制所述烹饪设备通过所述投料口加液以对传动盒面向锅盖内壁的端面进行清洁。
74.可以理解的是,在烹饪设备的自清洁模式下,控制烹饪设备通过投料口向锅体内加水,锅体和搅拌铲都是容易清洁到的,但是从投料口通入的水也无法在传动盒的端面停留,传动盒的端面得不到有效的清洗。基于此,在控制烹饪设备加液前,可以先控制搅拌铲停留在投料口的下方,从投料口加入的水会流到传动盒的端面上,以使传动盒的端面得到冲刷清洁。在本发明实施例中,可以通过霍尔电压检测装置检测传动盒的端面是否位于投料口的下方。
75.具体来说,可以在搅拌铲中设置磁体,在锅体中设置霍尔电压检测装置,锅体和锅盖是固定的,因此投料口的位置也是确定的,投料口可以设置在垂直于搅拌铲运动路径的方向上,如图10所示,锅盖122具有投料口1220和锅铲驱动轴1221,可以将投料口1220位于锅铲驱动轴1221的径向方向上,在锅铲驱动轴1221带动搅拌铲运动的过程中,投料口1220在某一时刻位于搅拌铲的上方。
76.在实际应用中,可以将霍尔检测装置和投料口设置垂直于锅铲驱动轴的相同径向
方向上。当锅铲驱动轴带动搅拌铲运动时,搅拌铲中的磁体和锅盖中的霍尔电压检测装置之间的距离会相应发生变化。当磁体离霍尔电压检测装置越近时,霍尔电压检测装置感受到的磁场越强,当磁体离霍尔电压检测装置越远时,霍尔电压检测装置感受到的磁场越弱。霍尔电压检测装置输出的霍尔电压信号可以随磁场的强度变化而变化,当磁场越强时,霍尔电压信号越大,当磁场越弱时,霍尔电压信号越小。基于此,可以根据霍尔电压信号的大小判断搅拌铲的位置。根据霍尔电压检测装置和投料口的位置关系,确认搅拌铲位于投料口的下方,如图10所示,可以将投料口1220位于锅铲驱动轴1221的径向方向上,在锅铲驱动轴1221带动搅拌铲运动的过程中,投料口1220在某一时刻位于搅拌铲的上方,搅拌铲121的位置确认,相应的传动盒的端面的位置也确认。
77.图3示出了霍尔电压检测装置和处理器之间的连接关系示意图。处理器可以给霍尔电压检测装置提供电源信号和地信号,图中依次表示为5v和gnd。当处理器给霍尔电压检测装置提供电源信号和地信号时,霍尔电压检测装置可以正常工作,也就是说,霍尔电压检测装置可以根据检测到的磁体相对于自身距离的变化输出对应的霍尔电压信号。
78.图4示出了主控电路的电路原理示意图,主控电路可以包括电阻r58、电阻r9、电容c45、半导体管d9、接口jp14、接口temp1,它们的规格参数依次是10k、nc、0.1uf/50v、ses0511d3、gh-3awt、tp。图中3v3、5v表示电源信号、gnd表示地信号,hall2 adc表示外接信号。图5示出了霍尔电压检测装置的电路原理示意图,霍尔电压检测装置的电路可以包括芯片u1、接口jp1,它们的规格参数依次是abk1360、phs-3a。
79.实际应用中,搅拌铲在锅铲输出轴的带动下运动,搅拌铲运动到距离霍尔检测装置最远的距离时,磁体与霍尔检测装置的距离也最远,此时霍尔电压为v1;搅拌铲运动到距离霍尔检测装置最近的距离时,磁体与霍尔检测装置的距离也最近,此时霍尔电压为v2。霍尔电压信号在v1-v2之间变化。可以将霍尔电压检测装置设置在与投料口邻近的位置上,当检测到霍尔电压为最大值时,可以确定搅拌铲位于投料口的下方。
80.具体实施过程中,霍尔电压检测装置输出电压为最大值时,搅拌铲位于一个固定的角度,考虑到传动盒的端面存在一定的宽度,可以将搅拌铲位于投料口下方的一定区域设置为控制烹饪设备加液的预设条件,可以在v1-v2之间预设一个电压阈值v3,当霍尔电压检测装置输出的电压在v3-v2这个电压区间时,确定搅拌铲位于投料口下方,因此,可以将霍尔电压检测装置输出的电压大于或等于电压阈值v3作为传动盒的端面位于投料口下方的判断条件。
81.另一实施例中,搅拌铲不在投料口的下方,控制锅铲驱动轴继续带动搅拌铲移动。结合上述关于搅拌铲位于投料口下方的描述,当霍尔电压检测装置输出的电压在v3-v2这个电压区间时,搅拌铲位于投料口下方,相应的,当霍尔电压检测装置输出的电压在v1-v3这个电压区间时,确定搅拌铲不在投料口的下方。当确定搅拌铲不在投料口的下方时,控制锅铲驱动轴继续带动搅拌铲运动,直至霍尔电压检测装置输出的电压超过设定的电压阈值。
82.下面给出几种确定传动盒的端面位于投料口下方的方法。
83.可选地,确定传动盒的端面位于投料口下方的过程可以实现为:按照预设采样周期,采集霍尔电压检测装置输出的多个霍尔电压采样信号;若多个霍尔电压采样信号满足预设条件,则确定传动盒的端面位于投料口下方。
84.可选地,霍尔电压检测装置设置在与预设位置对应的位置上。上述若多个霍尔电压采样信号满足预设条件,则确定搅拌铲位于预设位置的过程可以实现为:若多个霍尔电压采样信号中存在大于或者等于第一预设阈值的霍尔电压采样信号,则确定传动盒的端面位于投料口下方。
85.当霍尔电压检测装置设置在与投料口对应的位置上时,搅拌铲带动磁体旋转到投料口处,磁体与霍尔电压检测装置的距离最近,能够检测到的霍尔电压采样信号最大,当霍尔电压采样信号超过第一预设阈值时,可以确定传动盒的端面位于投料口下方。图6是霍尔电压采样信号的波形示意图,当该波形的“鼓包”位置超过第一预设阈值40v时,可以确定传动盒的端面位于投料口下方。
86.从图6中可以看出,一小段时间内的霍尔电压采样信号都大于第一预设阈值,在该时间段内都认为传动盒的端面位于投料口下方,但是实际中会存在偏差,也就是说,该时间段内只有某个时刻是传动盒的端面真正位于投料口下方的时刻,在其他时刻确定出的传动盒的端面位于投料口下方都是存在误差的。为了减小这种误差,可以将第一预设阈值向上调整,以无限接近于霍尔电压采样信号的最大值。
87.可以理解的是,实际中的霍尔电压采样信号会由于工作环境的影响发生波动。如图7所示,当霍尔电压采样信号随时间发生波动时,即使传动盒的端面位于投料口下方,采集到的霍尔电压采样信号也小于第一预设阈值,因此,为了更准确地识别出传动盒的端面是否位于投料口下方,本发明实施例还提供了一种确定传动盒的端面位于投料口下方的方法。
88.可选地,若多个霍尔电压采样信号的变化趋势满足趋势条件,则传动盒的端面位于投料口下方。
89.通过该确定传动盒的端面是否位于投料口下方的方法,不仅仅关注于霍尔电压采样信号是否大于某个阈值,而是观察霍尔电压采样信号的变化趋势,根据变化趋势确定传动盒的端面位于投料口下方。
90.可选地,上述若多个霍尔电压采样信号的变化趋势满足趋势条件,则确定传动盒的端面位于投料口下方的过程可以实现为:若多个霍尔电压采样信号随采样周期依次增大之后降低,则确定传动盒的端面位于投料口下方。
91.需要说明的是,对于霍尔电压检测装置来说,当磁体的不同磁极对着霍尔电压检测装置时,它输出的波形是不同的。如图9所示,当磁体的第一磁极(n极或s极)对着霍尔电压检测装置时,它输出的波形是“凸”的,当磁体的第二磁极(s极或n极)对着霍尔电压检测装置时,它输出的波形是“凹”的。具体磁体的哪一磁极对着霍尔电压检测装置,霍尔电压检测装置输出怎样的波形,是由霍尔电压检测装置中的芯片的规格决定的。
92.如果难以保证磁体的哪一磁极对着霍尔电压检测装置进行安装,还可以增加这样的判断逻辑,以防止磁极反装时,无法正确判断传动盒的端面位于投料口下方:若多个霍尔电压采样信号随采样周期依次降低之后增大,则确定传动盒的端面位于投料口下方。
93.通过上述方法,当磁极反装时,即使波形是“凹”的,也可以依据上述判断方式确定传动盒的端面位于投料口下方。
94.由于处理器中的数模信号转换器采样能力的不同,对于某些采样能力较差的数模信号转换器来说,采样的偏差会导致本来呈攀升趋势的波段被误认为开始跌落,这样也会
造成确认传动盒的端面位于投料口下方的误判。另外,由于搅拌铲是可以进行旋转和上下移动的,由于旋转时距离的变化相对于上下移动距离的变化较小,而当搅拌铲上下移动时,如果搅拌铲中的磁体离霍尔电压检测装置的距离很远,则霍尔电压检测装置采集到的霍尔电压采样信号较弱,也会导致传动盒的端面位于投料口下方的误判。在本发明实施例提供的第三种确定传动盒的端面位于投料口下方中,可以解决上述问题。
95.可选地,若多个霍尔电压采样信号的变化趋势满足趋势条件,则传动盒的端面位于投料口下方的过程可以实现为:若多个霍尔电压采样信号中的第一霍尔电压采样信号、第二霍尔电压采样信号和第三霍尔电压采样信号满足下述条件,则传动盒的端面位于投料口下方,其中,第三霍尔电压采样信号为多个霍尔电压采样信号中最后一个采集的霍尔电压采样信号:
96.第一霍尔电压采样信号和获取的最小霍尔电压信号之间的第一差值大于第一预设霍尔电压信号,且第一差值小于第二预设霍尔电压信号;第二霍尔电压采样信号和最小霍尔电压信号之间的第二差值大于第二预设霍尔电压信号,且第二差值小于第三预设霍尔电压信号;第三霍尔电压采样信号和最小霍尔电压信号之间的第三差值大于第三预设霍尔电压信号;其中,第一预设霍尔电压信号小于第二预设霍尔电压信号,第二预设霍尔电压信号小于第三预设霍尔电压信号。
97.或者,若多个霍尔电压采样信号的变化趋势满足趋势条件,则确定传动盒的端面位于投料口下方的过程可以实现为:若多个霍尔电压采样信号中的第四霍尔电压采样信号、第五霍尔电压采样信号和第六霍尔电压采样信号满足下述条件,则确定传动盒的端面位于投料口下方,其中,第六霍尔电压采样信号为多个霍尔电压采样信号中最后一个获取的霍尔电压采样信号:
98.第四霍尔电压采样信号和获取的最大霍尔电压信号之间的第四差值大于第四预设霍尔电压信号;第五霍尔电压采样信号和最大霍尔电压信号之间的第五差值大于第五预设霍尔电压信号,且第五差值小于第四预设霍尔电压信号;第六霍尔电压采样信号和最大霍尔电压信号之间的第六差值大于第六预设霍尔电压信号,且第六差值小于第五预设霍尔电压信号;其中,第四预设霍尔电压信号大于第五预设霍尔电压信号,第五预设霍尔电压信号大于第六预设霍尔电压信号。
99.上述两种判断方式的原理类似,第二种判断方式也是为了防止磁体反装而提出的。下面将详细说明第一种判断方式,第二种判断方式可以参照第一种判断方式的描述进行理解。
100.首先,可以获取最小霍尔电压信号。该最小霍尔电压信号可以是预设值,也可以通过实时检测的方式获取。如果通过实时检测的方式获取,则可以每当获取一个霍尔电压采样信号时,和前一个霍尔电压采样信号进行比较,将每次比较出的较小的霍尔电压采样信号记录为最小霍尔电压信号。
101.接着,每次采集到一个霍尔电压采样信号时,可以用当前采集的霍尔电压采样信号减去最小霍尔电压信号,用得到的差值和第一预设霍尔电压信号、第二预设霍尔电压信号、第三预设霍尔电压信号进行比较。
102.如果出现了某次采集的霍尔电压采样信号和最小霍尔电压信号的差值大于第一预设霍尔电压信号,且第一差值小于第二预设霍尔电压信号,接下来某次采集的霍尔电压
采样信号和最小霍尔电压信号的差值大于第二预设霍尔电压信号,且第二差值小于第三预设霍尔电压信号,再接下来某次采集的霍尔电压采样信号和最小霍尔电压信号的差值大于第三预设霍尔电压信号,则一旦出现某次采集的霍尔电压采样信号和最小霍尔电压信号的差值大于第三预设霍尔电压信号时,就可以确定搅拌铲回归于预设位置。
103.例如,假设第1次采集的霍尔电压采样信号和最小霍尔电压信号的差值记为
△
x1,第2次采集的霍尔电压采样信号和最小霍尔电压信号的差值记为
△
x2,第3次采集的霍尔电压采样信号和最小霍尔电压信号的差值记为
△
x3。第一预设霍尔电压信号记为a,第二预设霍尔电压信号记为b,第三预设霍尔电压信号记为c。当
△
x1>a且
△
x1<b,
△
x2>b且
△
x2<c,
△
x3>c时,传动盒的端面位于投料口下方。
104.确定第一预设霍尔电压信号、第二预设霍尔电压信号、第三预设霍尔电压信号的方式是,如图9所示,可以在上升一侧的波形上选择三个点a、b、c,然后用a点对应的霍尔电压信号减去前面所提及的最小霍尔电压信号,用b点对应的霍尔电压信号减去最小霍尔电压信号,用c点对应的霍尔电压信号减去最小霍尔电压信号,依次得到第一预设霍尔电压信号、第二预设霍尔电压信号、第三预设霍尔电压信号。
105.采用本发明,可以通过霍尔电压检测装置输出的霍尔电压信号,确定安装在搅拌铲中的磁体相对于自身的距离的变化,进而可以确定传动盒的端面位于投料口下方。
106.为了便于理解,结合如下的应用场景对以上提供的搅拌铲安装状态检测方法的具体实现进行示例性说明。
107.当搅拌铲被电机带动进行移动时,可以通过以下三种方式检测传动盒的端面是否位于投料口下方。
108.假设第一预设阈值是40v,在某个采样周期采集到的霍尔电压采样信号为50v,判断出该霍尔电压采样信号大于第一预设阈值,进而可以确定传动盒的端面位于投料口下方。
109.或者,假设当前已检测到3个连续增大的霍尔电压采样信号,当再次采集一个霍尔电压采样信号s时,该s的值为50v,在采集s之前一个采样周期采集的霍尔电压采样信号w的值为45v,则表示已经有3个连续增大的霍尔电压采样信号。当连续检测到3个依次递增的霍尔电压采样信号之后,如果在采集s之后一个采样周期采集的霍尔电压采样信号p的值小于s的值,则表示霍尔电压采样信号连续递增之后出现下降,进而可以确定s为峰值,传动盒的端面位于投料口下方。
110.再或者,假设第1次采集的霍尔电压采样信号20v和最小霍尔电压信号10v的差值
△
x1为10v,第2次采集的霍尔电压采样信号30v和最小霍尔电压信号10v的差值
△
x2为20v,第3次采集的霍尔电压采样信号40v和最小霍尔电压信号10v的差值
△
x3为30v。第一预设霍尔电压信号为5v,第二预设霍尔电压信号为15v,第三预设霍尔电压信号为25v。按照采样周期从第1次采集霍尔电压采样信号到第3次采集霍尔电压采样信号的推移,顺序出现有
△
x1>5v且
△
x1<15v,
△
x2>15v且
△
x2<25v,
△
x3>25v,可以判断传动盒的端面位于投料口下方。
111.采用本发明,可以通过霍尔电压检测装置输出的霍尔电压信号,确定安装在搅拌铲中的磁体相对于自身的距离的变化,进而确定传动盒的端面位于投料口下方。
112.如图11所示,本发明实施例提供的一种锅盖,配置于烹饪设备中,烹饪设备120包
括:所述锅盖、搅拌铲121、锅体123和处理器124;所述锅盖包括:锅盖122和投料口1220;
113.所述锅盖122上设置有霍尔电压检测装置1221;
114.所述搅拌铲121上设置有磁体1210;
115.所述投料口1220与外部的进料管连接;
116.所述处理器124,用于根据霍尔电压信号确定所述传动盒的端面位于投料口1220下方,控制所述烹饪设备120通过所述投料口1220加液以对所述传动盒的端面进行清洁。
117.如图12所示,本发明实施例提供的一种烹饪设备,烹饪设备120包括搅拌铲121、锅盖122、锅体123和处理器124,所述搅拌铲121中设置有磁体1210,所述锅盖122具有投料口1220和霍尔电压检测装置1221,所述霍尔电压检测装置1221用于根据所述磁体1210相对于所述霍尔电压检测装置1221的距离变化输出对应的霍尔电压信号,所述处理器124被配置为:
118.获取所述霍尔电压检测装置1221输出的霍尔电压信号;
119.响应于根据所述霍尔电压信号确定所述传动盒的端面位于投料口下方,控制所述烹饪设备120通过所述投料口1220加液以对所述传动盒的端面进行清洁。
120.可选地,所述霍尔电压检测装置1221设置在与投料口1220对应的位置上,所述处理器124还用于:
121.按照预设采样周期,采集所述霍尔电压检测装置1221输出的多个霍尔电压采样信号;
122.若所述多个霍尔电压采样信号满足预设条件,则确定传动盒的端面位于投料口1220下方。
123.可选地,所述处理器124,用于:
124.若所述多个霍尔电压采样信号中存在大于或者等于第一预设阈值的霍尔电压采样信号,则确定传动盒的端面位于投料口1220下方。
125.可选地,所述处理器124,用于:
126.若所述多个霍尔电压采样信号的变化趋势满足趋势条件,则确定传动盒的端面位于投料口1220下方。
127.可选地,所述处理器124,用于:
128.若所述多个霍尔电压采样信号随采样周期依次增大之后降低,则确定传动盒的端面位于投料口1220下方。
129.可选地,所述处理器124,还用于:
130.若所述多个霍尔电压采样信号随采样周期依次降低之后增大,则确定传动盒的端面位于投料口1220下方。
131.可选地,所述处理器124,用于:
132.若所述多个霍尔电压采样信号中的第一霍尔电压采样信号、第二霍尔电压采样信号和第三霍尔电压采样信号满足下述条件,则确定传动盒的端面位于投料口1220下方,其中,所述第三霍尔电压采样信号为所述多个霍尔电压采样信号中最后一个采集的霍尔电压采样信号:
133.所述第一霍尔电压采样信号和获取的最小霍尔电压信号之间的第一差值大于第一预设霍尔电压信号,且所述第一差值小于第二预设霍尔电压信号;
134.所述第二霍尔电压采样信号和所述最小霍尔电压信号之间的第二差值大于所述第二预设霍尔电压信号,且所述第二差值小于第三预设霍尔电压信号;
135.所述第三霍尔电压采样信号和所述最小霍尔电压信号之间的第三差值大于所述第三预设霍尔电压信号;
136.其中,所述第一预设霍尔电压信号小于所述第二预设霍尔电压信号,所述第二预设霍尔电压信号小于所述第三预设霍尔电压信号。
137.可选地,所述处理器124,用于:
138.若所述多个霍尔电压采样信号中的第四霍尔电压采样信号、第五霍尔电压采样信号和第六霍尔电压采样信号满足下述条件,则确定传动盒的端面位于投料口1220下方,其中,所述第六霍尔电压采样信号为所述多个霍尔电压采样信号中最后一个获取的霍尔电压采样信号:
139.所述第四霍尔电压采样信号和获取的最大霍尔电压信号之间的第四差值大于第四预设霍尔电压信号;
140.所述第五霍尔电压采样信号和所述最大霍尔电压信号之间的第五差值大于第五预设霍尔电压信号,且所述第五差值小于所述第四预设霍尔电压信号;
141.所述第六霍尔电压采样信号和所述最大霍尔电压信号之间的第六差值大于第六预设霍尔电压信号,且所述第六差值小于所述第五预设霍尔电压信号;
142.其中,所述第四预设霍尔电压信号大于所述第五预设霍尔电压信号,所述第五预设霍尔电压信号大于所述第六预设霍尔电压信号。
143.烹饪设备详细的实现过程和技术效果参见前述实施例中的描述,在此不再赘述。
144.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助加必需的通用硬件平台的方式来实现,当然也可以通过硬件和软件结合的方式来实现。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以计算机产品的形式体现出来,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
145.本发明实施例提供的搅拌铲安装状态检测方法可以由某种程序/软件来执行,该程序/软件可以由网络侧提供,前述实施例中提及的电子设备可以将该程序/软件下载到本地的非易失性存储介质中,并在其需要执行前述搅拌铲安装状态检测方法时,通过cpu将该程序/软件读取到内存中,进而由cpu执行该程序/软件以实现前述实施例中所提供的搅拌铲安装状态检测方法,执行过程可以参见前述图1至图12中的示意。
146.实施例3
147.参见图13,本实施例中,本公开的烹饪设备至少包括烹饪容器11和加料装置。
148.其中,烹饪容器11被构造为盛放制作菜品的食材,比如炒菜锅、炖汤锅等,烹饪容器11包括锅体110和设置在锅体110上以打开或遮盖锅体开口处的锅盖111。
149.加料装置与烹饪容器11通过输料管路23连通,且被配置为将清洗液通过输料管路23输入烹饪容器11内,或者将空气通入输料管路23内。
150.可以理解,烹饪设备在制作菜品时需要添加调料,调料包括油、酱油、醋、耗油、辣椒油等各种食材佐料。
151.通常情况下,加料装置被配置为将至少一种调料添加至烹饪容器11内。
152.详细地,加料装置包括调料盒组件20、基座21、第一驱动装置22和驱动泵(图中未示出)。其中,调料盒组件20包括至少一个调料盒;驱动泵被配置为将调料盒内的调料泵入烹饪容器中11;基座上设置有落料口(图中未示出),且落料口被构造为通过驱动泵与输料管路23连通;第一驱动装置22被配置为驱动调料盒相对于基座21转动。
153.驱动泵设置在基座21内且通过管路连接在落料口和输料管路23之间,以在启动时落料口内形成负压,在内外压差作用下调料盒内调料被泵入落料口内,最后经输料管路23达到烹饪容器11内。具体地,驱动泵为蠕动泵。
154.详细地,当第一驱动装置22驱动调料盒转动至落料口和调料盒的出料口连通后,启动驱动泵,调料盒内调料被泵入落料口内,最后经输料管路23被送入烹饪容器11内。当添加的调料量达到预设值后,则再次启动第一驱动装置22驱动调料盒相对于基座21转动至调料盒和落料口错开,加料停止,烹饪设备11继续烹制菜品。
155.继续参见图13,本公开的烹饪设备还包括底座10,底座10上具有与烹饪容器11的锅体110的外形相匹配的容纳槽,以放置烹饪容器11。底座10上还设置有加热装置、控制面板、显示元件和控制元件等,其中,加热元件用于给烹饪容器内食材加热,控制面板上设置有供用户选择的按键或者触摸式按键,以便用户根据喜欢选择菜谱等,显示元件则显示用户选择的菜品名称、烹饪容器内的温度以及制作时长等,以便于用户实时掌握烹饪设备的制作状态;控制元件则是与加热装置、显示元件和控制面板等通信连接,以基于用户指令控制烹饪设备执行相应的工作。
156.继续结合图13至图15,本公开的烹饪设备还锅铲组件13,锅铲组件13包括第一锅铲130和第二锅铲131,第二锅铲131随第一锅铲130公转,且能相对于第一锅铲130自传。锅盖111通过悬臂112带动,在锅体110上盖合或掀起,当锅盖111盖合于锅体110时,锅体110内腔形成烹饪食材的密闭空间,即形成烹饪腔。锅铲组件13设置在锅盖111上,在锅盖111盖合在锅体110时伸入锅体110内腔中,用以搅拌食材,并且在烹饪程序结束后用以刷洗锅体110的内底面、内侧壁和锅盖111的内壁。
157.另外,在本公开的某些实施例中,烹饪设备1可以是包括有控制模块的智能物联网终端设备。控制模块可以是但不限于包含一种存储有计算机程序的计算机可读存储介质,该计算机程序被执行时能够实现本公开实施例所提供的烹饪设备的自清洁方法和控制方法中的步骤。因此,本公开的实施例可提供为方法、系统、或计算机程序产品;可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。其中,也可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。在一个典型的配置中,计算设备包括一个或多个处理器(cpu)、输入/输出接口、网络接口和内存。内存可能包括计算机可读介质中的非永久性存储器,随机存取存储器(ram)和/或非易失性内存等形式,如只读存储器(rom)或闪存(flash ram)等。以上只是举例说明控制模块可能的形式和组成,但并不以此为限。
158.控制模块与加料装置和锅铲组件以及烹饪设备的其他功能元件通信连接,以接受用户指令并基于用户指令控制这些功能元件执行相应的动作。
159.锅铲组件13位于烹饪腔,烹饪设备还包括第二驱动装置,第二驱动装置包括转动
装置、传动装置以及升降装置。转动装置与锅铲驱动连接,用于驱动锅铲组件13转动;示例性的,转动装置包括转动机构和第一动力输出轴。转动机构包括转动电机和皮带轮,转动电机设置在悬臂112前端的锅铲安装部内,第一动力输出轴的一端通过皮带轮连接于转动电机,另一端穿过锅盖111,并且在锅盖111的内壁一侧连接于锅铲组件13。其中,控制模块分别电性连接于转动装置和升降装置,用以根据烹饪条件选择性的启动转动装置和/或升降装置运动,以及适应性的控制锅铲组件13的转速和/或升降速度。例如启动转动电机,以驱动第一动力输出轴转动,从而通过第一动力输出轴带动第一锅铲130在锅体110内公转。在此过程中,转动装置同步启动传动装置,以带动第二锅铲131在锅体110内自转。
160.升降装置设于锅盖111,且与锅铲组件13驱动连接,升降装置能够带动锅铲组件13相对于锅体110在第一位置和第二位置之间进行升降运动。
161.当锅铲组件13处于第一位置时,锅铲组件13与锅盖111的内壁贴合接触;在转动装置的驱动下,锅铲组件13能够在第一位置对锅盖111的内壁进行清洁;当所锅铲组件13处于第二位置时,锅铲组件13与锅盖111的内壁脱离接触。示例性的,第一位置可以是锅铲组件13上升的最高位置,第二位置可以是锅铲组件13下降的最低位置。当锅铲组件13处于第二位置时,第一锅铲130与锅体310的内壁面314间隙配合或过盈配合,第二锅铲131与锅体310的底面间隙配合或过盈配合。
162.详细地,继续参见图15,本实施例中,第一锅铲130包括第一弹性部1300,第一弹性部1300具有面向锅体110的内侧壁和锅盖111的内壁的倾斜面,且第一弹性布1300被构造为通过该倾斜面与锅体110的内侧壁过盈配合或与锅盖111的内壁的倾斜面过盈配合。
163.同样,第二锅铲131包括第二弹性部1310,第二弹性部1310具有面向锅体110的内底面的倾斜面,且第二弹性部1310被构造为通过该倾斜面与锅体110的内底面过盈配合。
164.也就是说,锅铲组件13包括弹性部,弹性部具有面向烹饪容器11内壁的倾斜面,且弹性部被构造为通过倾斜面与烹饪容器11的内壁过盈配合。
165.详细地,烹饪设备的自清洁过程为:在指定的调料盒内加入清洗液,再控制第一驱动装置22驱动调料盒相对于基座21转动至基座21的落料口与调料盒的出料口连通,然后启动驱动泵,将调料盒内的清洗液输送至烹饪容器11内。
166.与此同时,加热烹饪容器11内清洗液预设时长,待清洗液的温度达到设定值后启动锅铲组件13使其旋转清洗锅体110内底面和内侧壁,锅铲组件13运行预设时长后,再将锅铲组件13上升至于锅盖11的内壁接触,再重启锅铲组件13转动使其旋转清洗锅盖111预设时长,清洗完成后停机并提醒用户起锅倒清洗液。
167.可以理解,烹饪设备在自清洁烹饪容器11的同时也用清洗液冲洗加料装置的落料口以及连通落料口和烹饪容器11之间的输料管路23。但是,由于结构限定,输料管路23内总会残留一下调料残渣,比如生抽或老抽等深色调料不易被清洗干净,这样会影响到菜品的质量和口感,从而影响到用户对烹饪设备的使用体验。
168.为此,本公开提供了一种烹饪设备的清洁方法,本公开的烹饪设备的清洁方法包括如下步骤:
169.加料装置将预设量的清洗液按照至少两个批次先后分别送入输料管路23内,以冲洗输料管路23,且在每次清洗冲洗完成后再向输料管路23内通入,以排空输料管路23。
170.需要说明的是,本文在此所述的“清洗液”包括清水或者混合有洗洁精和/或消毒
液的清水。
171.基于前文记载的烹饪设备的结构,本公开的第一驱动装置22还被配置驱动调料盒相对于基座21转动至调料盒与基座21的落料口错开,此时驱动泵被配置为将外部空气通过落料口通入输料管路23内。
172.基于此,根据本公开的一个实施例,本公开的烹饪设备的清洁方法中“加料装置将预设量的清洗液按照至少两个批次先后分别送入输料管路23内,以冲洗输料管路23,且在每次清洗冲洗完成后再向输料管路23内通入,以排空输料管路23”的步骤包括:
173.s11、第一驱动装置22驱动调料盒转动至与基座21的落料口连通;
174.s12、启动驱动泵将调料盒内的清洗液泵入输料管路23内,以冲洗输料管路23;
175.s13、第一驱动装置22驱动调料盒转动至与基座21的落料口错开;
176.s14、启动驱动泵将外部空气通入输料管路23内,以排空输料管路23;
177.s15、重复执行至少一次步骤s11至步骤s14,直至驱动泵泵出的清洗液液体量达到预设液体量。
178.与现有技术中加料装置将调料盒内清洗液一次性泵入输料管路23相比,本公开的烹饪设备的清洁方法则是将调料盒内清洗液分批次泵入输料管路23,且在每次清洗冲洗后再将空气输入输料管路23将其内清洗液排空,在总加液体量不变的情况下能更好地实现清洁效果。
179.需要说明的是,本公开的烹饪设备的清洁方法中步骤s11至s14之间的循环次数取决于预先设定的驱动泵每次泵出清洗液的液体量,循环次数至少为两次,也就是说,加料装置将预设量清洗液按照至少两个批次先后分别送入输料管路23内。且,每次泵出的清洗液的液体量可以相同也可以不同。
180.根据本公开的一个实施例,本公开的烹饪设备的清洁方法中各个批次清洗液的液体量逐渐减小。
181.详细地,比如将预设量清洗液按照两个批次先后分别送入输料管路内,且第一批次送入第一预设量的清洗液,第二批次送入第二预设量的清洗液,且第一预设量大于第二预设量。更为详细地,假设预设量清洗液为300ml,将第一预设量设置为280ml,第二预设量为20ml。
182.根据本公开的一个实施例,本公开的烹饪设备的清洁方法中各个批次清洗液的液体量相同。
183.详细地,比如加料装置将预设量清洗液按照三个批次先后分别送入输料管路23内,且三个批次的清洗液液体量相同。更为详细地,假设预设量清洗液为300ml,将这些清洗液分三批次,以每次100ml的液体量输入输料管路23内。
184.需要说明的是,上述数据仅是示例性说明本公开的烹饪设备的自清洁方法,但并不限定本公开的烹饪设备的清洁方法的保护范围。
185.当烹饪设备的输料管路清洁工作结束后,清洗输料管路后的清洗液会被直接排入烹饪容器内,烹饪设备提醒用户起锅倒清洗液。当然,烹饪设备在清洁输料管路的同时也可以清洗烹饪容器。
186.如前文所述,根据本公开的一个实施例,本公开的烹饪设备还包括锅铲组件13和升降装置。锅铲组件13以可转动地方式设置在锅盖111上,且升降装置设置在锅盖111上且
被配置为驱动锅铲组件13在第一位置和第二位置之间升降;位于第一位置时,锅铲组件13与锅体110过盈配合,位于第二位置时,锅铲组件13与锅盖111配合。锅铲组件13及升降装置的具体结构请参见前文记载。
187.在步骤s15后,本公开的清洁方法还包括如下步骤:
188.s20、加热锅体内的清洗液;
189.s21、驱动位于第一位置的锅铲组件13转动第一预设时长,以清洗锅体110;
190.s22、暂停转动锅铲组件13并被提升至第二位置,以使锅铲组件13和锅盖111的内壁接触;
191.s23、驱动第二锅铲组件13转动第二预设时长,以清洗锅盖111;
192.s24、清空锅体110内的清洗液。
193.详细地,步骤s24包括:
194.锅铲组件13停止转动并停止加热锅体110内的清洗液;
195.驱动锅铲组件13下降至第一位置,提醒用户起锅倒清洗液。
196.由于烹饪设备工作后其锅体110污染程度比锅盖111严重,基于此,根据本公开的一个实施例,第一预设时长大于第二预设时长,即锅组件13清洗锅体110的时间大于清洗锅盖111的时间,以合理安排锅体110和锅盖111的清洗时间,以高效清洗烹饪容器11。
197.详细地,根据本公开的一个实施例,第一预设时长为50s(秒),第二预设时长为20s(秒)。
198.由此可见,本公开的烹饪设备在烹饪完成后能自助完成锅体110和锅盖111的清洗任务,当然基于制作菜品的菜谱类型,本公开的烹饪设备也可以仅单独清洗锅体110或者锅盖111。
199.当从输料管路23进入烹饪容器11的水达到预设量时,根据本公开的一个实施例,本公开的烹饪设备的清洁方法还包括如下步骤:
200.s20'、加热锅体内的清洗液;
201.s21'、驱动位于第一位置的锅铲组件13转动第一预设时长,以清洗锅体110;
202.s22'、清空锅体110内的清洗液。
203.可以理解,使用上述清洁方法能清洗烹饪容器11,但是在实际使用中不同菜品所使用的食材、调料以及制作过程的存在差异,使得烹饪完成后烹饪容器的污染程度也不尽相同。
204.基于此,本公开的烹饪设备的清洁方法再完成针对烹饪容器的首次清洗后还进行再次清洗。
205.在步骤s24之后,本公开的烹饪设备的清洁方法还包括:
206.s25、判断是否收到再次清洗指令,若是返回步骤s11、否则结束清洗。
207.根据本公开的一个实施例,本公开的清洁设备步骤s25中二次清洗触发指令可以为第一次清洗完成后锅体被放回底座10后触发底座10上控制元件。
208.详细地,控制元件可以为设置在底座10上的微动开关或接近开关,当锅体被放回底座10上时,微动开关或接近开关被触发,进入二次清洁模式,即进入步骤s11中。
209.根据本公开的清洁设备步骤s25中二次清洗触发指令也可以为提醒用户需要二次清洗,用户通过控制面板发出触发指令。
210.详细地,烹饪设备的控制面板上设置清洗模式的按键,烹饪设备在提醒用户起锅倒水的同时提醒用户需要二次清洗,待锅体被放回底座上后,用户手动按压控制面板上的清洗模式按钮,以启动清洗。
211.可以理解,烹饪设备的自清洁功能,通过加热的水、产生的热蒸汽以及高速转动的锅铲带来的刮擦作用和水流冲刷作用快速实现了锅体和锅盖的自清洁。
212.在自清洁过程中,起到刮擦作用的是设计在锅铲组件13上的弹性部,该弹性部具体为硅胶刮条。在锅中无油或润滑条件较差的情况下,当锅铲组件13在第一方向转动时与烹饪容器11的内壁组件的阻力,大于锅铲组件13在第二方向转动时与烹饪容器11的内壁之间的阻力。在烹饪容器11中无油或润滑条件较差的情况下,锅铲组件11沿第一方向转动时,锅铲组件3的弹性部与烹饪容器11的摩擦阻力过大发生折返,导致锅铲组件13转速下降明显甚至卡滞。锅铲组件11的弹性部的其中一侧设置有倾斜面,倾斜面朝向烹饪容器11的内壁,并且能够与烹饪容器11过盈配合,第一方向为背向于倾斜面的方向,第二方向为朝向倾斜面的方向。锅铲组件11沿第一方向转动时,倾斜面与烹饪容器11的内壁之间产生的摩擦阻力较大,清洁效果更强;锅铲组件11沿第二方向转动时,倾斜面与烹饪容器11的内壁之间产生的摩擦阻力较小,不容易出现卡滞。
213.需要说明的是,本文中第一方向和第二方向中一者为逆时针方向,另一者则为顺时针方向,具体方向取决于锅铲组件13与烹饪容器11的配合方式,本领域技术人员基于使用结果选定即可。
214.为此,执行首次清洗指令时,本公开的清洁设备的清洁方法的步骤s21和步骤s23中锅铲组件在第一方向上转动。
215.执行再次清洗指令时,本公开的清洁设备的清洁方法的步骤s21和步骤s23中锅铲组件在第二方向上转动。
216.如此,清洁设备在自清洁过程中可以降低锅铲组件13发生转动卡滞问题的风险,也可以节省清洁时间、提高清洁效率,还可以防止锅铲组件13因双向转动引起烹饪设备溢水的问题。
217.本公开的清洁设备的清洁方法步骤s21和步骤s23中驱动锅铲组件13转动的第二驱动装置的空转比为0.5至0.99。具体地,第二驱动装置为电机。
218.如此,可使锅铲组件13和锅体110/锅盖111之间形成较大的接触力,以快速剐蹭锅体110/锅盖111上的污渍。
219.除了利用冲洗输料管路23的水完成烹饪容器的清洗外,本公开的烹饪设备的清洁方法还可以直接清洗烹饪容器11。
220.根据本公开的一个实施例,本公开的烹饪设备的自清洁方法包括如下步骤:
221.s30、启动第一驱动装置22驱动调料盒转动至与基座的落料口连通;
222.s31、启动驱动泵将调料盒内的清洗液泵入锅体110内;
223.s32、加热锅体110内的清洗液;
224.s33、驱动位于第一位置的锅铲组件13转动第一预设时长,以清洗锅体110;
225.s34、当锅体110内液体量达到预设量时,驱动泵停机,停止加清洗液;
226.s35、暂停转动锅铲组件13并提升锅铲组件13至第二位置,以使锅铲组件13和锅盖111的内壁接触;
227.s36、驱动锅铲组件13转动第二预设时长,以清洗锅盖111;
228.s37、清空锅体110内的清洗液。
229.详细地,步骤s37包括:
230.锅铲组件13停止转动并停止加热锅体110内的水;
231.驱动锅铲组件13下降至第一位置,并提醒用户起锅倒水。
232.基于此,本公开的烹饪设备的清洁方法再完成针对烹饪容器的首次清洗后还进行再次清洗。
233.在步骤s37之后,本公开的烹饪设备的清洁方法还包括:
234.s38、判断是否收到再次清洗指令,若是返回步骤s30、否则结束清洗。
235.根据本公开的一个实施例,本公开的清洁设备步骤s38中二次清洗触发指令可以为第一次清洗完成后锅体被放回底座10后触发底座10上控制元件。
236.详细地,控制元件可以为设置在底座10上的微动开关或接近开关,当锅体被放回底座10上时,微动开关或接近开关被触发,进入二次清洁模式,即进入步骤s30中。
237.根据本公开的清洁设备步骤s38中二次清洗触发指令也可以为提醒用户需要二次清洗,用户通过控制面板发出触发指令。
238.详细地,烹饪设备的控制面板上设置清洗模式的按键,烹饪设备在提醒用户起锅倒水的同时提醒用户需要二次清洗,待锅体被放回底座上后,用户手动按压控制面板上的清洗模式按钮,以启动清洗。
239.可以理解,烹饪设备的自清洁功能,通过加热的水、产生的热蒸汽以及高速转动的锅铲带来的刮擦作用和水流冲刷作用快速实现了锅体和锅盖的自清洁。
240.在自清洁过程中,起到刮擦作用的是设计在锅铲组件13上的弹性部,该弹性部具体为硅胶刮条。在锅中无油或润滑条件较差的情况下,当锅铲组件13在第一方向转动时与烹饪容器11的内壁组件的阻力,大于锅铲组件13在第二方向转动时与烹饪容器11的内壁之间的阻力。在烹饪容器11中无油或润滑条件较差的情况下,锅铲组件11沿第一方向转动时,锅铲组件3的弹性部与烹饪容器11的摩擦阻力过大发生折返,导致锅铲组件13转速下降明显甚至卡滞。
241.需要说明的是,本文中第一方向和第二方向中一者为逆时针方向,另一者则为顺时针方向,具体方向取决于锅铲组件13与烹饪容器11的配合方式,本领域技术人员基于使用结果选定即可。
242.为此,执行首次清洗指令时,本公开的清洁设备的清洁方法的步骤s33和步骤s36中锅铲组件13在第一方向上转动。
243.执行再次清洗指令时,本公开的清洁设备的清洁方法的步骤s33和步骤s36中锅铲组件13在第二方向上转动。
244.如此,清洁设备在自清洁过程中可以降低锅铲组件13发生转动卡滞问题的风险,也可以节省清洁时间、提高清洁效率,还可以防止锅铲组件13因双向转动引起烹饪设备溢水的问题。
245.本公开的清洁设备的清洁方法步骤s33和步骤s36中驱动锅铲组件13转动的第二驱动装置的空转比为0.5至0.99。具体地,第二驱动装置为电机。
246.如此,可使锅铲组件13和锅体110/锅盖111之间形成较大的接触力,以快速剐蹭锅
体110/锅盖111上的污渍。
247.除了利用冲洗输料管路23的水完成烹饪容器的清洗外,本公开的烹饪设备的清洁方法还可以直接清洗烹饪容器11。
248.根据本公开的一个实施例,本公开的烹饪设备的清洗方法包括如此步骤:
249.加料装置将预设量的清洗液通过输料管路23送入烹饪容器11内,以冲洗所述输料管路23;
250.加料装置将气流通入所述输料管路23内,以将输料管路23内残留的清洗液排至烹饪容器11内;
251.锅铲组件13在第一位置转动,以至少清洗所述烹饪容器11的锅体110;
252.锅铲组件13运动至第二位置,并通过转动以至少清洗烹饪容器11的锅盖111。
253.为了便于更好地理解,下面本文将结合几个应用场景说明本公开的烹饪设备的清洁方法。
254.应用场景一
255.向调料盒内加入预设量的清洗液,启动第一驱动装置驱动调料盒转动至与基座上的落料口连通,启动驱动泵,将调料盒内清洗液泵入输料管路内,以清洗输料管路;然后,启动第一驱动装置驱动调料盒转动至与基座上的落料口错开,驱动泵将外部空气泵入输料管路内,排空输料管路内残留的水;重复执行至少一次上述步骤,直至驱动泵泵出的清洗液液体量达到预设量,至此输料管路清洗结束。
256.应用场景二
257.向调料盒内加入预设量的清洗液,启动第一驱动装置驱动调料盒转动至与基座上的落料口连通,启动驱动泵,将调料盒内清洗液泵入输料管路内,以清洗输料管路;然后,启动第一驱动装置驱动调料盒转动至与基座上的落料口错开,驱动泵将外部空气泵入输料管路内,排空输料管路内残留的水;重复执行至少一次上述步骤,直至驱动泵泵出的清洗液的液体量达到预设量,至此输料管路清洗结束。
258.与此同时,输送管路内水流入锅体内,加热锅体内的清洗液,启动第二驱动转轴驱动位于第一位置的锅铲组件转动第一预设时长,以清洗锅体的内底面和内侧壁;暂停转动锅铲组件并使其上升至第二位置,以与锅盖的内壁接触;然后,启动第二驱动装置驱动锅铲组件转动第二预设时长,以清洗锅盖的内壁;锅铲组件停止转动并停止加热锅体内水,清洗结束,并提醒用户起锅倒清洗液。
259.烹饪设备执行首次清洗任务时,锅铲组件在第一方向上转动。
260.如果需要再次清洗烹饪容器,烹饪设备重复上述工作过程即可。且,在再次清洗过程中,锅铲组件在第二方向上转动,且控制驱动锅铲组件转动的第二驱动装置的空占比为0.5至0.99。
261.应用场景三
262.向调料盒内加入清洗液,第一驱动装置驱动调料盒转动至与基座上的落料口连通,启动驱动泵,将调料盒内清洗液泵入烹饪容器的锅体内。
263.与此同时,加热锅体内的清洗液,第二驱动装置驱动位于第一位置的锅铲组件转动第一预设时长,以清洗锅体内壁;当锅体110内清洗液的液体量达到预设量时,驱动泵停机,停止加清洗液;暂停转动锅铲组件并使其上升至第二位置,以与锅盖的内壁接触;然后,
启动第二驱动装置驱动锅铲组件转动第二预设时长,以清洗锅盖的内壁;锅铲组件停止转动并停止加热锅体内水,清洗结束,并提醒用户起锅倒清洗液。
264.烹饪设备执行首次清洗任务时,锅铲组件在第一方向上转动。
265.如果需要再次清洗烹饪容器,烹饪设备重复上述工作过程即可。且,在再次清洗过程中,锅铲组件在第二方向上转动,且控制驱动锅铲组件转动的第二驱动装置的空占比为0.5至0.99。
266.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1