智能清洁系统的制作方法
1.本技术涉及智能清洁技术领域,尤其是涉及智能清洁系统。
背景技术:
2.清洁机器人一般应用在家居清洁中,不仅能够代替人工清扫地面上的灰尘、毛发等垃圾,同时还能够代替人工对地面进行湿拖。
3.目前的清洁机器人,包括机器人主体,该机器人主体的底部设置有用于擦拭地面的旋转拖。该旋转拖包括骨架以及用于擦拭地面的拖布,骨架的上端转动安装于机器人主体的底部,拖布可通过魔术贴贴在骨架的下端以实现拖布安装到骨架上,在机器人主体行走的过程中,旋转拖的拖布用于擦拭地面,完成擦拭后,使用者可以将拖布从骨架上撕下来进行清洗。
4.针对上述技术中,发明人发现,旋转拖完成擦拭地面后,还需要使用者先将拖布从骨架上脱下来进行清洗,这种方式不便于使用者使用清洁机器人。
技术实现要素:
5.本技术提供智能清洁系统,具有使用便利性高的优点。
6.智能清洁系统,包括基站以及机器人主体,所述机器人主体设置有控制器;所述机器人主体的底部设置有擦拭机构,所述控制器与所述擦拭机构电连接,以控制所述擦拭机构工作;所述基站的下侧面开设有可供所述机器人主体进入的工作腔,所述工作腔靠近腔壁的位置设置有清洗池,当所述机器人主体进入工作腔时,所述擦拭机构容置于所述清洗池;所述基站的顶部沿竖直方向开设有容置室,所述容置室位于所述清洗池的上方;所述基站内设置有供水机构以及集水机构,所述供水机构用于给所述清洗池供水;所述集水机构用于收集所述清洗池内的污水;所述集水机构以及所述供水机构设置于所述容置室,所述集水机构与所述控制器连接,所述供水机构与所述控制器连接。
7.通过采用上述技术方案,基站的下侧面开设有工作腔,工作腔内设置有清洗池,以便于机器人主体进入工作腔后能够使得擦拭机构进入到清洗池内,而供水机构用于对清洗池进行供水,以便于实现在清洗池内清洗擦拭机构,代替人工清洗擦拭机构的步骤。需要将清洗池内的水排出时,集水机构将清洗池内的水进行收集,因此无需使用者将基站移动至可排水的位置再进行排水;由于容置室位于清水池的上方,有利于提高基站在竖直方向上的空间合理利用率。
8.优选的,所述集水机构包括集水箱和抽水件,所述抽水件设置在所述集水箱内,所述集水箱可拆卸设置在所述容置室内,所述抽水件的抽水端连通设置有抽水管,所述抽水管的出水端与所述集水箱的内部连通,所述抽水管的进水端穿入至所述清洗池的底部,所述抽水管设置有集水电磁阀,所述控制器与所述集水电磁阀电连接。
9.通过采用上述方案,清水池内的水在抽水件和抽水管的配合作用下回流到集水
箱,因此使用者可以在集水箱收集一定量的水之后再将集水箱内的水进行集中排放,省去使用者多次排放清水池内的水的步骤。
10.优选的,所述容置室包括污水收集区以及清水供给区,所述污水收集区与所述清水供给区在水平方向上呈并列设置,所述集水箱设置在所述污水收集区内,所述供水机构包括清水箱以及排水支管,所述清水箱设置在所述清水供给区内,所述清水箱的底部连通设置有排水支管,所述排水支管设置有清水电磁阀,所述清水电磁阀与所述控制器电连接,所述排水支管的出水端伸入至所述清洗池内。
11.通过采用上述方案,需要往清洗池内进行注水时,使用者可通过控制器打开清水电磁阀,由于排水支管设置在清水箱的底部,因此清水箱内的清水能够沿着排水支管流到清水池内。另外,由于清水供给区与污水收集区在水平方向上呈并列设置,有利于提高容置室的集成度,节省清水箱以及集水箱的空间利用率。
12.优选的,所述工作腔的底部安装有倾斜块,所述倾斜块的底部与所述工作腔的底部固定连接,所述倾斜块的上表面靠近所述清洗池的一侧沿朝向所述工作腔腔口的一侧呈倾斜向下设置。
13.通过采用上述技术方案,这样设置一方面便于机器人主体从基站外进入工作腔,另一方面,由于倾斜块的上表面靠近清洗池的一侧沿朝向工作腔腔口的一侧呈倾斜向下设置,因此倾斜块靠近清洗池的一侧的最顶部高于倾斜块靠近工作腔腔口的最顶部,由此使得清洗池内的水不容易溢出工作腔。
14.优选的,所述清洗池内安装有若干呈水平设置的搓条,所述搓条用于搓洗所述擦拭机构,若干所述搓条两两相交接,且所述搓条与所述抽水管的下端呈错位设置;所述搓条的顶部沿竖直方向上穿设有若干出水孔,若干所述出水孔沿所述搓条的长度方向等距设置。
15.通过采用上述方案,若干搓条两两相交排布,以增大搓条与擦拭机构的接触频次,使得附在擦拭机构处的灰尘或毛发能够更快速脱落,提高擦拭机构的清洗效率;同时,由于搓条处分布多个出水孔,有利于擦拭机构更充分接触清水池内的水,从而提升擦拭机构的清洗效果。
16.优选的,所述擦拭机构包括伸缩杆以及拖布,所述伸缩杆转动安装于所述机器人主体的底部,所述机器人主体内部设置有用于驱动所述伸缩杆转动的驱动机构,所述伸缩杆的下端固定安装有连接盘,所述连接盘的底部与拖布可拆卸连接,所述搓条用于搓洗所述拖布。
17.通过采用上述方案,伸缩杆在拖布与机器人主体底部之间的连接作用,同时能够调节拖布与机器人主体底部之间的间距,当机器人主体进入工作腔后且擦拭机构进入清洗池后,伸缩杆伸长以便于拖布伸至清洗池的搓条上,方便搓条搓洗拖布。
18.优选的,所述伸缩杆包括固定管以及活动管,所述固定管的一端安装于所述驱动机构,所述固定管的另一端套设于所述活动管,且所述活动管的上端滑移连接于所述固定管内部,所述活动管的下端与所述连接盘固定连接,所述固定管内设置有调节弹簧,所述调节弹簧的一端与所述固定管的内壁固定连接,所述调节弹簧的另一端与所述连接盘的上表面固定连接,当所述调节弹簧处于自然状态时,所述活动管部分伸出于所述固定管。
19.通过采用上述方案,活动管的上端滑移连接于固定管内部,实现活动管稳定地上
下滑移,调节弹簧设置于固定管的内部,使得机器人主体经过倾斜块的过程中,活动管缩进固定管,此时调节弹簧压缩;当机器人主体完全进入工作腔时,此时伸缩杆、连接盘以及拖布均在清洗池上方,此时调节弹簧迅速恢复自然状态并使得活动管伸出固定管,此时拖布伸入清洗池内并抵在搓条上,此时拖布能够接触到清洗池内的水,更好地清洗拖布。
20.优选的,所述搓条在所述出水孔的顶部固定设置有凸起,所述凸起呈中空设置,所述凸起的内部与所述出水孔内部相连通,所述凸起底部的面积大于所述凸起的顶部开口面积。
21.通过采用上述方案,搓条在出水孔的顶部设置凸起,且该凸起呈中空设置,使得出水孔内的水能够通过该中空设置的凸起喷出,另外,由于凸起的顶部开口面积小于底部的面积,这有利于增强凸起内部的水压,有利于提高从凸起处喷出来的水对擦拭机构的冲击力,有利于提升擦拭机构的清洗效果。
22.优选的,所述搓条的端部与所述清洗池的侧壁固定连接,所述搓条的底部与所述清洗池底部的距离设置为1-2cm。
23.通过采用上述方案,这样设置以便于提高清洗池内的水的流动性,同时有利于抽水管将清洗池内的水快速抽走。
24.优选的,所述凸起的侧壁自顶部沿朝向凸起底部的方向呈倾斜向下设置。
25.通过采用上述方案,这样设置使得拖布处的颗粒物或毛发容易被凸起钩住,而且凸起的侧壁自顶部沿朝向底部的方向呈倾斜向下设置,使得凸起的外侧面呈斜面设置,使得沾在凸起顶部边缘处的毛发或颗粒物能更顺畅地掉落清洗池内,便于后续能集中处理清洗池内的杂质。
26.综上所述,本技术的有益技术效果为:基站的下侧面开设有工作腔,工作腔内设置有清洗池,以便于机器人主体进入工作腔后能够使得擦拭机构进入到清洗池内,而供水机构用于对清洗池进行供水,以便于实现在清洗池内清洗擦拭机构,代替人工清洗擦拭机构的步骤。需要将清洗池内的水排出时,集水机构将清洗池内的水进行收集,因此无需使用者将基站移动至可排水的位置再进行排水;由于容置室位于清水池的上方,有利于提高基站在竖直方向上的空间合理利用率。
附图说明
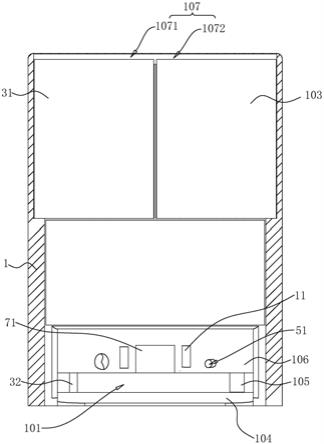
27.图1是本技术实施例1中智能清洁系统的结构示意图。
28.图2是本技术实施例1中基站的机壳的局部结构剖视图。
29.图3是本技术实施例1中机器人主体的结构示意图。
30.图4是本技术实施例1中旋转拖的结构示意图。
31.图5是本技术实施例1中旋转拖的局部结构剖视图。
32.图6是本技术实施例1中搓条采用另一种实施方式时智能清洁系统的结构示意图。
33.图7是本技术实施例1中搓条的结构剖视图。
34.图8是本技术实施例1中搓条采用另一种实施方式时基站的结构示意图。
35.图9是本技术中实施例2中清水箱与排水支管的连接结构示意图。
36.图10是本技术实施例3中输水管的结构示意图。
37.图11是本技术实施例3中输水管的正视图。
38.附图标记说明:1、基站;101、工作腔;102、清洗池;103、清水箱;104、倾斜块;105、排水支管;106、限位块;107、容置室;1071、污水收集区;1072、清水供给区;11、充电基座;2、机器人主体;201、后挡;202、前挡;21、旋转拖;211、伸缩杆;2111、固定管;2112、活动管;2113、调节弹簧;212、拖布;213、连接盘;214、弧形避位孔;22、清扫机构;23、充电极片;31、集水箱;32、抽水管;33、输水管;331、进水部;332、分流支部;4、搓条;41、出水孔;42、凸起;5、总管;51、出水管;6、行走轮;71、发射器;72、接收器。
具体实施方式
39.以下结合图1-图11对本技术作进一步详细说明。
40.实施例1:智能清洁系统,应用于家居清洁领域,使用者能够将智能清洁系统用于家居地面清扫以及湿拖地面。参见图1,智能清洁系统包括基站1和机器人主体2。基站1的侧面开设有工作腔101,机器人主体2包括机壳,机壳内设置有控制器(图中未示出)。机壳的底部设置有两个行走轮6,机壳内还设置有用于驱动行走轮6转动的驱动电机(图中未示出),驱动电机与控制器电连接,以实现控制器控制机器人主体2在地面或者在物体的表面上移动的功能。机壳的底部设置有清扫机构22以及擦拭机构,控制器能够控制清扫机构22以及擦拭机构工作,实现清扫以及擦拭地面。工作腔101靠近腔壁的位置设置有清洗池102,基站1的顶部沿竖直方向开设有容置室107,容置室107的顶部呈开口设置,使用智能清洁系统时,一般采用盖子将容置室107的顶部盖住。容置室107位于清洗池102的上方,且容置室107与清洗池102连通。基站1的容置室107内设置有供水机构以及集水机构,集水机构和供水机构均与控制器连接。控制器控制供水机构给清洗池102供清水;控制器控制集水机构收集清洗池102内的污水。
41.在机器人主体2完成清洁工作后,控制器能够控制机器人主体2移动返回基站1的工作腔101内。而在机器人主体2向工作腔101内移动的过程中,控制器同步控制供水机构向清洗池102进行供水。在机器人主体2移动至工作腔101内部时,擦拭机构可进入至清洗池102内,此时可实现清洗擦拭机构。完成对擦拭机构的清洗后,控制器控制集水机构动作,此时集水机构将清洗池102内的污水进行收集,因此使用者可以在集水机构收集一定量的水之后再将集水机构内的水进行集中排放,省去使用者多次排放清洗池102内的水的步骤,提高使用者使用智能清洁系统的便利性。
42.参见图2,容置室107包括污水收集区1071以及清水供给区1072,污水收集区1071与清水供给区1072在水平方向上呈并列设置,供水机构设置在清水供给区1072,集水机构设置在污水收集区1071;这样设置有利于提高容置室107的集成度,节省供水机构以及集水机构的空间利用率。
43.参见图1和图2,供水机构包括清水箱103以及排水支管105。清水箱103的顶部呈开口设置,清水箱103可拆卸设置在清水供给区1072内,因此使用者能够先将清水箱103从容置室107内部拆出来,然后往清水箱103内部进行注水。清水箱103由透明塑胶材料制得,有助于使用者在往清水箱103注水过程中了解到清水箱103内的水量。排水支管105呈竖直设置,排水支管105的进水端与清水箱103的底部相接通,排水支管105的出水端穿出容置室
107并伸入至清洗池102内,排水支管105设置有清水电磁阀,清水电磁阀与控制器电连接,使用者通过控制清水电磁阀动作来调节排水支管105的通断,便于清水箱103往清洗池102内部进行注水或者停止往清洗池102内部进行注水。
44.参见图2,集水机构包括集水箱31和抽水件,集水箱31的顶部呈开口设置,集水箱31可拆卸设置在容置室107内。抽水件设置在集水箱31内,在本实施例中,抽水件为抽水泵(图中未示出),抽水泵与控制器电连接,使用者能够通过控制器控制抽水泵工作或者停止工作。在其他实施方式中,抽水件也可以是其他能够实现抽水功能并且能够与控制器电连接的零部件。抽水泵的抽水端连通设置有抽水管32,抽水管32的出水端与集水箱31的内部连通,抽水管32的进水端穿出容置室107并伸入至清洗池的底部。抽水管32的进水端与排水支管105的出水端呈错位设置,使得抽水管32与排水支管105的工作相互独立。抽水管32设置有集水电磁阀,集水电磁阀用于控制抽水管32的通断。控制器与集水电磁阀电连接,实现控制器控制集水电磁阀动作,从而有利于实现对清洗池102内的污水进行自动抽取。
45.具体的,工作腔101靠近腔口一侧的底部安装有倾斜块104,倾斜块104的底部与工作腔101的底部固定连接,倾斜块104的上表面为供机器人主体2通过的斜面,且该斜面自靠近清洗池102的一侧沿朝向工作腔101腔口的一侧呈倾斜向下设置,以便于机器人主体2从基站1外进入至清洗池102处清洗擦拭机构。该倾斜块104的最顶部与清洗池102的顶部处于同一水平面上,以便于机器人主体2停留在倾斜块104的最顶部并清洗擦拭机构。为了提高机器人主体2在倾斜块104顶部的停留稳定性,倾斜块104的斜面与水平面形成一定锐角。锐角的范围设置为3
°‑6°
,在本实施例中,锐角设置为4
°
。倾斜块104的斜面处还设置有防滑纹,以便于机器人主体2能够在倾斜块104的斜面上进行稳定移动。
46.图3显示的是机器人主体2的整体结构,机壳的前侧设置有前挡202,机壳的后侧设置有后挡201。清扫机构22与擦拭机构依次安装在前挡202和后挡201之间,而清扫机构22位于靠近前挡202的位置,擦拭机构位于靠近后挡201的位置,以使得机器人主体2在前行过程中,先采用清扫机构22对地面进行清扫,再采用擦拭机构对地面进行擦拭。
47.为了实现更好的拖地效果,擦拭机构的数量设置为两个。其中,擦拭机构包括第一电机(图中未示出)和旋转拖21。第一电机安装在壳体内部并用于驱动旋转拖21转动。机器人主体2底部的两个旋转拖21横向并列设置,以增大擦拭机构的清洁面积。
48.参见图4和图5,旋转拖21包括伸缩杆211、连接盘213以及拖布212。伸缩杆211的上端转动安装于机壳的底部并与第一电机的输出端固定连接,伸缩杆211的下端穿出机壳并与连接盘213的中心位置固定连接,连接盘213的底部与拖布212的连接面通过魔术贴可拆卸连接,拖布212的擦拭面用于擦拭地面或物体表面。其中,连接盘213的底部设置有公扣,拖布212的连接面设置有母扣,通过公扣与母扣的配合实现连接盘213与拖布212之间的可拆卸连接。
49.具体的,伸缩杆211包括固定管2111以及活动管2112。固定管2111的一端与第一电机的输出端固定连接,固定管2111的另一端套设于活动管2112,且活动管2112的上端滑移连接于固定管2111内部,活动管2112的下端与连接盘213固定连接。为了提高活动管2112相对固定管2111上下滑移的稳定性,固定管2111的水平截面呈五边形,活动管2112的外侧壁与固定管2111的内壁相抵接。
50.更具体的,固定管2111内设置有调节弹簧2113,调节弹簧2113的一端与固定管
2111的内壁固定连接,调节弹簧2113的另一端与连接盘213的上表面固定连接,当调节弹簧2113处于自然状态时,活动管2112部分伸出于固定管2111。调节弹簧2113与伸缩杆211配合设置,使得旋转拖21整体在固定管2111的轴线方向上实现伸缩功能,使得旋转拖21能够应用于高度不同的表面擦拭。
51.回看图1,为了提高旋转拖21清洗的有效性,清洗池102内安装有若干呈水平设置的搓条4,搓条4用于搓洗旋转拖21的拖布212。搓条4与抽水管32的下端呈错位设置,以便于拖布212铺展在搓条4上。搓条4的端部与清洗池102的侧壁固定连接,搓条4的底部与清洗池102底部的距离设置为1-2cm,因此,清洗池102内即使安装了搓条4也能够保证清洗池102底部的水能够顺畅流动。若干搓条4首尾相互连接,并且若干搓条4两两相交接,以增大搓条4与拖布212的接触面积。搓条4的顶部沿竖直方向上穿设有若干出水孔41,若干出水孔41沿搓条4的长度方向等距设置。由于在清洗拖布212的过程中,拖布212铺展在搓条4上,若干出水孔41中的水能够对拖布212的擦拭面进行清洗,以进一步提升对拖布212的清洁效果。另外,由于出水孔41的数量设置为多个,因此有利于实现多个出水点对拖布212的擦拭面进行清洗。
52.在另一种实施方式中,参见图6,搓条4在出水孔41的顶部固定设置有凸起42,该凸起42可以由硬质塑胶材料或者不锈钢材料制得,以提高该凸起42在湿润环境下的耐用性。凸起42呈中空设置,凸起42的内部与出水孔41内部相连通,且凸起42的内部的中心点与出水孔41的中心点位于同一竖直线上,使得出水孔41内部的水能够通过凸起42喷出。该凸起42设置能够用于刮落拖布212的擦拭面上的灰尘、毛发等杂质,进一步提高对拖布212的清洗效果。
53.图7显示的是搓条4以及凸起42的剖视结构,凸起42的底部与出水孔41的边缘部分固定连接,凸起42的顶部开口用于作为凸起42的出水点。凸起42底部的面积大于凸起42的顶部开口面积,且凸起42的侧壁自顶部沿朝向凸起42底部的方向呈倾斜向下设置,这使得凸起42的水平截面面积自下往上逐渐减小。为方便理解,将凸起42的顶部开口的面积设置为s1,将凸起42底部开口的面积设置为s2,凸起42底部开口面积与出水孔41在水平截面面积相等。s1与s2的比值范围在0.3-0.5之间,在本实施例中,s1与s2的比值设置为0.46,这样设置在保证了凸起42的出水效率的前提下,提高凸起42内部的水压。
54.在水从凸起42的底部流向凸起42的顶部开口的过程中,由于从出水孔41流向凸起42的水量不变,而凸起42出水点的面积减小,有利于提高从凸起42处喷出来的水对拖布212的冲击力,进而提升拖布212的清洗效果;同时,多个顶部开口面积较小的凸起42对拖布212底部具有摩擦作用,使得拖布212擦拭面沾到的灰尘或者颗粒物更容易从拖布212的擦拭面处脱落下来。
55.参见图8和图9,基站1设置有限位块106,限位块106的一侧面与工作腔101的腔壁固定连接,限位块106的另一侧面用于与机器人主体2后挡201的侧面相抵接。限位块106位于清水箱103的下方并位于清洗池102的上方。排水支管105的出水端穿出限位块106的底部并伸入清洗池102内。当机器人主体2的后挡201与限位块106相抵接时,旋转拖21位于清洗池102内,此时拖布212铺展在搓条4上。
56.机器人主体2通过光电传感器更加准确回到工作腔101内并使得拖布212能够更准确铺展在搓条4上。具体的,光电传感器包括发射器71和接收器72。发射器71嵌设在限位块
106的侧面,接收器72对应设置在机器人主体2的后挡201侧面,发射器71用于发射激光,接收器72用于接收发射器71发射出的激光。接收器72与机器人主体2的控制器电连接。当机器人主体2需要充电或者是清洗旋转拖21时,机器人主体2可以在发射器71、接收器72以及控制器的配合作用下准确进入工作腔101内,此时机器人主体2的旋转拖21位于清洗池102内,拖布212更准确地铺展在搓条4上。
57.该工作腔101的腔壁设置有充电基座11,机器人的后挡201处设置有供电电池,该供电电池设置有用于与充电基座11配合充电的充电极片23,当机器人主体2的供电电池电量不足时,控制器控制机器人主体2回到工作腔101内,在发射器71、接收器72以及控制器的配合作用下,机器人主体2的充电极片23与充电基座11对准接触,而控制器并控制充电基座11为供电电池进行充电。
58.本技术的实施原理:机器人主体2进入工作腔101后能够使得旋转拖21进入到清洗池102内,而供水机构用于对清洗池102进行供水,然后第一电机驱动旋转拖21转动,从而实现在清洗池102内清洗旋转拖21,代替人工清洗擦拭机构的步骤。需要将清洗池102内的水排出时,集水机构将清洗池102内的水进行收集,因此无需使用者将基站1移动至可排水的位置再进行排水;由于容置室107位于清洗池102的上方,有利于提高基站1在竖直方向上的空间合理利用率。
59.实施例2:智能清洁系统,与实施例1的区别在于:参见图9,排水支管105通过一总管5与清水箱103的下侧进行连接,具体的,该总管5基本呈竖直设置,总管5的上端与清水箱103连接并相通。为方便理解,将排水支管105的口径设置为a1,将总管5的口径设置为a2(排水支管105的壁厚与总管5的壁厚忽略不计),排水支管105的口径a1与总管5的口径a2比值范围为0.8-0.9,在本实施例中,口径a1与口径a2比值设置为0.88,以提高排水支管105的排水效率。
60.总管5的下侧还连通设置有出水管51。总管5的口径大于出水管51的口径。在本实施例中,出水管51的数量设置为两根。出水管51设置有电磁阀,出水管51的电磁阀与控制器电连接。出水管51的出水端向下延伸并穿出限位块106用于抵接后挡201的侧面,而排水支管105的出水端与出水管51的出水端错位设置,使得排水支管105的排水与出水管51的出水可以同步进行。
61.机器人主体2的内部对应安装有两根用于润湿两个旋转拖21的输水管33。连接盘213的表面穿设有多个弧形避位孔214。输水管33的进水端穿出机器人主体2的后挡201侧面,输水管33的进水端用于与出水管51相接触连通,使得出水管51的清水能够流到输水管内;而输水管33的出水端穿出机壳的底部并位于弧形避位孔214的上方,从输水管33的出水端流出的水通过该弧形避位孔214滴落至拖布212上。
62.在发射器71、接收器72以及控制器的配合作用下,机器人主体2准确进入工作腔101内,当机器人主体2的后挡201与限位块106的侧面相抵接时,机器人主体2中出水管51的出水端能够与输水管的进水端相互接触并连通,以使得清水箱103内的清水能够在出水管51以及输水管33的作用下流向旋转拖21,通过这种方式能够实现在智能清洁系统擦拭地面前高效润湿旋转拖21。由于输水管33和出水管51对接的位置在清洗池102的上方,因此,在输水管33脱离出水管51之后,出水管51的出水端处多余的水可以滴落在清洗池102内进行存储,以便后续可以使用,同时也减少出水管51出水后清水滴落到基站1外的情况发生。
63.为了便于把控旋转拖21的润湿程度,将输水管33的口径范围在1.5cm-2.0cm之间。在本实施例中,输水管33的口径设置为1.8cm,在保证输水管的输水效率的前提下,通过输水管33的口径的特定设置控制输水管33的输水量,使得输水管33内的清水对旋转拖21的润湿程度更合适,省去旋转拖21高速脱水的过程。
64.在机器人主体2进入工作腔101的过程中,为了使得输水管33的进水端与出水管51的出水端更准确对接,出水管51出水端的口径与输水管33进水端处的口径的比值范围在0.6-0.85之间,在本实施例中,出水管51的出水端的口径与输水管33的进水口比值为0.8,一方面有利于保证出水管51的输水效率,另一方面有利于实现出水管51的出水端能够插入输水管的进水端,有利于实现输水管33与出水管51的紧密连接。
65.本实施例原理:需要对旋转拖21进行润湿时,使用者可以控制机器人主体2移动至工作腔101内并使得机器人主体2的输水管33进水端与出水管51连通,此时控制器再控制出水管51的电磁阀打开,此时清水箱103内的水通过出水管51流进输水管33处,由于输水管33的出水端位于拖布212的上方,因此输水管33内的清水能够滴落在拖布212,实现润湿拖布212。
66.实施例3:智能清洁系统,与实施例2的区别在于:出水管51的数量设置为一根,输水管33的数量对应设置有一根。参见图10和图11,输水管包括一个进水部331以及两个分流支部332,进水部331的一端穿出机器人主体2的后挡201,以用于对接出水管51的出水端;进水部331的另一端均与两个分流支部332的端部相连通,使得进水部331内部的清水能够分别流进两个分流支部332内。其中一个分流支部332远离进水部331的一端穿出机器人主体2(结合图3)的底部并位于其中一个拖布212的上方;另一个分流支部332远离进水部331的一端穿出机器人主体2的底部并位于另一个拖布212的上方,使得分流支部332内部的清水能够流向拖布212。由此,采用一个进水部331用于对接出水管51的出水端,使得出水管51与进水部331对接一次即可将两个拖布212同步润湿。
67.为了进一步提高分流支部332内的清水能够快速流向旋转拖21,分流支部332与进水部331之间的连接处设置有圆弧过渡面,该圆弧过渡面的设置以便于进水部331内部的清水更快速流向分流支部332,分流支部332的内壁自靠近进水部331的一端沿朝向旋转拖21的方向呈倾斜设置,使得进水部331内部的清水能够快速通过分流支部332并流向旋转拖21,同时也使得输水管内部能够稳定存储清水。
68.在机器人主体2拖地过程中,容易出现拖布212的湿度降低的情况,由此,在分流支部332的出水口设置有电磁阀,电磁阀与控制器电连接。分流支部332的电磁阀与控制器配合设置,在无需润湿拖布212时,可以通过电磁阀闭合分流支部332的出水口,使得清水存储在分流支部332内部;当需要在拖地过程中再次润湿拖布212时,使用者能够通过控制器控制电磁阀打开,此时分流支部332内的清水流向拖布212,实现在拖地过程中无需返回基站1接水也能够再次润湿拖布212。
69.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1