一种遥控回收去污机的制作方法
1.本发明涉及核安全防护技术领域,尤其是涉及一种遥控回收去污机。
背景技术:
2.公知的,核燃料在生产、装填、库存、运输和维护保养过程中,或因操作失误或因其他不可抗拒因素,极有可能发生核泄漏事故/事件;核泄漏等事故主要的危害后果是生产生活场地弥散的放射性粉尘和溅落沉降到现场的放射性物质的辐照效应对生活工作在此场所人员的健康损伤。对于关系到国计民生、需快速恢复现场秩序的场所和使用功能的设施,需要采取应急响应措施控制现场内放射性污染的弥散并净化现场环境。在事故现场环境,诸如房间、候车候机厅、列车车厢和坑道类的狭窄空间内的放射性污染的消控是应急响应的重要环节。
3.由于具有防护功能的大型装备无法进入上述狭小空间进行,常规中小型装备作业均需要人员在污染区直接参与作业,防护不足易对参与人员造成较大的伤害。因此提供无人化消除作业设备是高危高毒高辐射区作业人员安全防护或核事故应急的迫切要求。
技术实现要素:
4.本发明的目的在于提供了一种适用于狭小空间的遥控回收去污机,以解决现有技术中存在的核事故应急状况下放射性污染物清除、高危高毒高辐射区消控作业人员安全防护不足的技术问题。本发明提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
5.本发明提供的一种遥控回收去污机,主要包括自行平台和与自行平台无线通讯的手持遥控终端,安设于自行平台结构体上的回收作业系统、控制系统、照明系统和通信系统、环境识别与探测系统;所述自行平台、回收作业系统、照明系统、通信系统、环境识别与探测系统均与控制系统信号连接;控制系统与手持遥控终端无线通讯;还包括机载操作面板,所述机载操作面板设置在自行平台右后上侧,并与控制系统信号连接;前述所有系统除手持遥控终端外均与供电系统电联;
6.优选地,所述控制系统通过通信系统与手持遥控终端无线连接,实现无线遥控操作;所述控制系统包含控制逻辑、异常状态检测,实现作业功能同时检测电量、风压、回收容积等信息;所述照明系统包括照明灯和光感开关通过感知光线强度变化打开和关闭,所述照明灯和光感开关均与控制系统电连;
7.优选地,所述环境识别与探测系统包括检测障碍物用的防碰撞雷达、提供现场行驶方向图像的摄像头;所述防碰撞雷达和摄像头与控制系统电气连接;
8.优选地,所述回收作业系统主要包括动力吸尘系统、地面回收系统、碎片收集系统、热熔封包系统和连接风管;所述地面回收系统与连接风管的前端连接,所述连接风管的后端与碎片收集系统接;所述碎片收集系统与动力吸尘系统连接;前述动力吸尘系统、地面回收系统、热熔封包系统均固定于自行平台的结构体上;
9.更优地,所述动力吸尘系统主要包括动力吸尘头,初级过滤器,核级过滤器,过滤桶体;所述动力吸尘头置于所述过滤桶体顶部位置,所述初级过滤器、核级过滤器由外向内依次置于所述过滤桶体内部,并固定其上;
10.更优地,所述地面回收系统主要包括回收头,动力旋转毛刷,升降机构;所述升降机构与所述动力旋转毛刷连接,用于控制动力旋转毛刷的升降工作状态,所述升降机构固定在所述自行平台的结构体上;所述回收头与动力旋转毛刷通过连接杆连接;前述连接风管的前端与回收头活动连接;
11.更优地,所述热熔封包系统包括2件加热板,2件笔式电动推杆和 2件固定支架;所述的加热板固定在笔式电动推杆上,所述笔式电动推杆固定在固定支架上,所述的固定支架固定在自行平台的结构体上;
12.更优地,所述碎片收集系统为直角三通结构,2个直角小口分别作为进风口与风管的后端连接和作为出风口与动力吸尘系统连接,1个竖直大口作为废物落料口与热熔包连接;出风口与动力吸尘系统连接处安装过滤网;
13.更优地,所述热熔包为热熔材料收集包袋,袋口与碎片收集系统下端竖直大口活动连接,底部卡置在自行平台的结构体上,热熔包放置于热熔封包系统中间;
14.更优地,所述的手持遥控终端具备自动地面回收作业操作按键、作业停止按键、复位按键、行驶摇杆等功能键。
15.本发明提供的遥控回收去污机,与现有技术的区别在于,可遥控的自行平台、安设于平台结构上的环境识别与探测系统、照明系统、回收作业系统、控制系统和通信系统,环境识别与探测系统、回收作业系统和平台结构均与控制系统电连,控制系统通过通信系统与手持遥控终端无线通讯,控制系统能够接收和传输信号于手持遥控终端,以使手持遥控终端能够根据控制系统传输的信号分析并通过控制系统控制平台结构体、环境识别与探测系统和回收作业系统的工作,控制系统设置本地操作面板,可在无手持遥控终端参与下实现回收作业。回收作业系统包括自动地面回收作业和人工手持回收作业,以分别应对不同工况下的核污染区块。本系统结构简单,易于操作,回收清除效果好,安全性更强。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
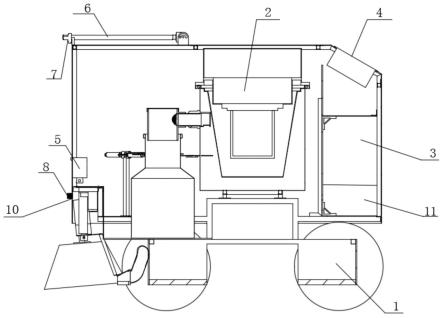
17.图1为本发明一种遥控回收去污机的整体结构示意图;
18.图2为本发明一种遥控回收去污机中回收作业系统2结构示意图;
19.图3为本发明一种遥控回收去污机中动力吸尘系统2.1结构示意图;
20.图4为本发明一种遥控回收去污机中地面回收系统结构2.2示意图;
21.图5为本发明一种遥控回收去污机中热熔封包2.4系统结构示意图;
22.图6为本发明一种遥控回收去污机中手持遥控终端9结构示意图。
23.图中,1、自行平台;2、回收作业系统;3、控制系统;4、机载操作面板;5、照明系统;6、通信系统;7、摄像头;8、防碰撞雷达;9、手持遥控终端;10、环境识别与探测系统;11、供电
系统;2.1、动力吸尘系统;2.2、地面回收系统;2.3、碎片收集系统;2.4、热熔封包系统;2.5、连接风管;2.1.1、动力吸尘头;2.1.2、初级过滤器; 2.1.3、核级过滤器;2.1.4、过滤桶体;2.2.1、回收头;2.2.2、动力旋转毛刷;2.2.3、升降机构;2.2.4、连接杆;2.4.1、加热板;2.4.2、笔式电动推杆;2.4.3、固定支架。
具体实施方式
24.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
25.本发明提供的一种遥控回收去污机,如图1、图6所示,主要包括自行平台1和与自行平台1无线通讯的手持遥控终端9,安设于自行平台1结构体上的回收作业系统2、控制系统3、照明系统5和通信系统 6、环境识别与探测系统10,各系统之间位置相互匹配;所述自行平台1、回收作业系统2、照明系统5、通信系统6、环境识别与探测系统 10均与控制系统3信号连接;控制系统3与手持遥控终端9无线通讯;遥控回收去污机还包括机载操作面板4,所述机载操作面板4设置在自行平台1右后上侧,并与控制系统3信号连接;前述所有系统除手持遥控终端9外均与供电系统11电联;所述控制系统3通过通信系统6 与手持遥控终端9无线连接,实现无线遥控操作;所述控制系统3包含控制逻辑、异常状态检测,实现作业功能同时检测电量、风压、回收容积等信息;所述照明系统5包括照明灯和光感开关,通过感知光线强度变化打开和关闭,所述照明灯和光感开关均与控制系统3电连;所述环境识别与探测系统10包括检测障碍物用的防碰撞雷达8、提供现场行驶方向图像的摄像头7;所述防碰撞雷达8和摄像头7与控制系统3电气连接;如图2所示,前述回收作业系统2主要包括动力吸尘系统2.1、地面回收系统2.2、碎片收集系统2.3、热熔封包系统2.4 和连接风管2.5;所述地面回收系统2.2与连接风管2.5的前端连接,所述连接风管2.5的后端与碎片收集系统2.3连接;所述碎片收集系统 2.3与动力吸尘系统2.1连接;前述动力吸尘系统2.1、地面回收系统2.2、热熔封包系统2.4均固定于自行平台1的结构体上;所述热熔封包系统2.4水平斜45
°
安装在自行平台1的结构体上;如图3所示,所述动力吸尘系统2.1主要包括动力吸尘头2.1.1,初级过滤器2.1.2,核级过滤器2.1.3,过滤桶体2.1.4;所述动力吸尘头2.1.1置于所述过滤桶体2.1.4顶部位置,主要负责提供吸尘动力,受控制系统3控制;所述初级过滤器2.1.2、核级过滤器2.1.3由外向内依次置于所述过滤桶体2.1.4内部,并固定其上;如图4所示,所述地面回收系统 2.2主要包括回收头2.2.1,动力旋转毛刷2.2.2,升降机构2.2.3;所述升降机构2.2.3与所述动力旋转毛刷2.2.2连接,用于控制动力旋转毛刷2.2.2的升降工作状态,所述升降机构2.2.3固定在所述自行平台1的结构体上,并通过其来实现初始工位和作业工位切换;所述回收头2.2.1与动力旋转毛刷2.2.2通过连接杆2.2.4连接;前述连接风管2.5的前端与回收头2.2.1活动连接;如图5所示,所述热熔封包系统2.4包括2件加热板2.4.1,2件笔式电动推杆2.4.2和2 件固定支架2.4.3;所述的加热板2.4.1固定在笔式电动推杆2.4.2上, 所述笔式电动推杆2.4.2固定在固定支架2.4.3上,所述的固定支架 2.4.3固定在自行平台1的结构体上;前述回收作业系统2中的碎片收集系统2.3为直角三通结构,2个直角小口一个作为进风口与风管2.5 的后端连接,另一作为出风口与动力吸尘系统2.1连
接,1个竖直大口作为废物落料口与热熔包2.6活动连接;与动力吸尘系统2.1连接的出风口处安装过滤网;风管2.5内流动携带污染物气流通过进风口进入碎片收集系统2.3,因风道扩口和过滤网阻挡造成气流流速下降,携带的污染物在重力作用下落至热熔包2.6,实现集中收集;前述热熔包 2.6为热熔材料制成的收集袋,袋口与碎片收集系统2.3下端竖直大口活动连接,可采取挂接或紧固连接等方式,其底部卡置在自行平台1的结构体上,放置于热熔封包系统2.4中间;当热熔包2.6收集从碎片收集系统2.3落料口掉落的污染物至满包时,控制系统3通过检测感应器检测到后通过控制热熔封包系统2.4的加热板2.4.1将热熔包2.6 加热封口后移除,保证放射性污染物不再二次泄露;所述的手持遥控终端9具备自动地面回收作业操作按键、作业停止按键、复位按键、行驶摇杆等功能键,通过通信系统6与控制系统3连接,进行遥控操作。
26.本发明提供的一种遥控回收去污机,其工作过程为:
27.实际使用过程中,本发明具备两种操作模式:一是使用手持遥控终端9操作作业;二是使用机载操作面板4操作作业。接到去污任务后,操作人员通过手持遥控终端9在污染区域外,通过机上通信系统6 连接的控制系统3,操控自行平台1进行行走;安设于平台结构体上的用于探检测环境信息的环境识别与探测系统10中的防碰撞雷达8、提供现场行驶方向图像的摄像头7实时查看前方实况;通过二者对遥控回收去污机实时行驶监控、保护;在图像延时等情况造成遥控回收去污机行驶环境与实时图像不匹配时,在距离障碍1m位置停止行进。操作人员调整行进路线后可重新进入自动地面回收作业。
28.由于地面回收系统具备初始状态和作业状态两个工位,遥控回收去污机行驶过程中,地面回收系统处于初始工位,此时距地面距离满足行驶越障要求;到达污染区域后,遥控回收去污机处于自动地面回收作业时,控制系统3通过控制地面回收系统2.2的升降机构2.2.3 带动回收头2.2.1、动力旋转毛刷2.2.2自动下落至作业介质表面;同时启动动力吸尘系统2.1中的动力吸尘头2.1.1,回收机自行直线行驶,将所经过区域污染物通过地面吸尘系统2.2中的动力旋转毛刷2.2.2 旋转将污物扫进回收头2.2.1,再通过连接风管2.5吸入碎片收集系统 2.3;由于碎片收集系统2.3为直角三通结构,在竖直大口扩口降速及过滤网阻挡后污物掉入热熔包2.6中,微小污染物随气流进入动力吸尘系统2.1,经初级过滤器2.1.2、核级过滤器2.1.3过滤后,将洁净空气排放至周围环境;当控制系统3的检测器检测到热熔封包2.6装满后,回收作业停止;发出指令,控制热熔封包系统2.4中的笔式电动推杆2.4.2推动加热板2.4.1将热熔包2.6封口;人工打开操作们,将打包收口后的热熔包2.6与碎片收纪系统2.3竖直大口脱开,并从机体内取出,再安装好新的热熔包2.6,关闭操作门,通过手持遥控终端9,继续进行下一波次的回收作业。
29.本发明还可以进行手动回收作业;主要是通过人工切换连接风管 2.5和回收头2.2.1,操作员手持回收头对准作业目标区域进行定点回收作业。操作员在做好准备人工回收作业后通过机载操作面板4中的手动回收按键启动手动回收作业:将所对准区域污染物通过手持回收头回收入机体,较大污染物经连接更换的风管、碎片收集系统2.3回收进入热熔包2.6中,微小污染物随气流进入动力吸尘系统2.1,经初级过滤器2.1.2、核级过滤器2.1.3过滤后,将洁净空气排放至周围环境;污染物满包后封口移走再重新安装,循环操作。
30.上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1