清洁机器人的清扫控制方法、控制系统及清洁机器人与流程
本发明属于清洁设备,具体涉及一种清洁机器人的清扫控制方法、清扫控制系统及清洁机器人。
背景技术:
1、清洁机器人,又称自动打扫机、机器人吸尘器等。其利用人工智能,能够自动在房间内完成地面清理工作。清洁机器人在工作时,一般采用刷扫和真空吸尘方式,将地面杂物吸纳进机身内部的尘盒内,从而完成地面清理的功能。在正常清扫时,清洁机器人在室内反复行走覆盖,如:沿边清扫、集中清扫、随机清扫、直线往复清扫等路径打扫。
2、然而,在很多室内场景铺设有地毯,现有的清洁机器人在清扫过程中,沿着导航路径会经常翻越地毯,在地毯和地板之间上下多次。一方面,由于地毯高于地板,在上下地毯过程中,对地毯和地板的相交地带清洁效果较差,甚至会抖落抹布上的灰尘,降低了用户体验。另一方面,多次翻越地毯,可能会出现驱动轮打滑情况,降低覆盖效率。
3、因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现思路
1、因此,本发明所要解决的技术问题是现有技术中清洁机器人对地毯面清洁效率低,清洁效果不好。
2、为解决上述技术问题,本发明提供一种清洁机器人的清扫控制方法,包括:
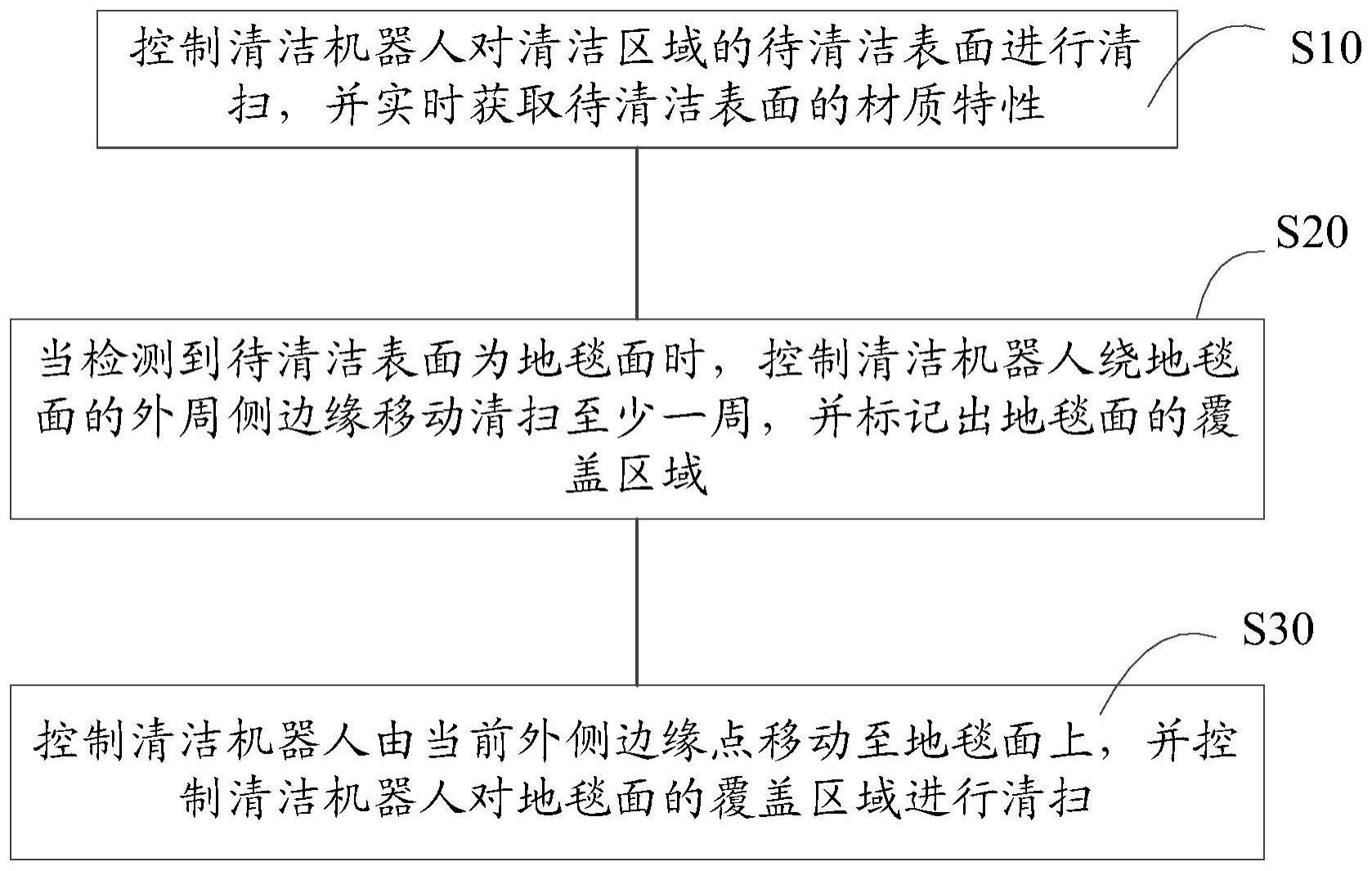
3、控制所述清洁机器人对清洁区域的待清洁表面进行清扫,并实时获取所述待清洁表面的材质特性;
4、当检测到所述待清洁表面为地毯面时,控制所述清洁机器人绕所述地毯面的外周侧边缘移动清扫至少一周,并标记出所述地毯面的覆盖区域;
5、控制所述清洁机器人由当前外侧边缘点移动至所述地毯面上,并控制所述清洁机器人对所述地毯面的覆盖区域进行清扫。
6、在其中一实施例中,所述控制所述清洁机器人对所述地毯面的覆盖区域进行清扫,具体包括:
7、控制所述清洁机器人在所述地毯面的覆盖区域内直线往复清扫,然后控制所述清洁机器人绕所述地毯面的覆盖区域的内周侧边缘清扫;或,
8、控制所述清洁机器人绕所述地毯面的覆盖区域的内周侧边缘清扫,然后控制所述清洁机器人在所述地毯面的覆盖区域内直线往复清扫。
9、在其中一实施例中,所述控制所述清洁机器人在所述地毯面的覆盖区域内直线往复清扫,具体包括:
10、控制所述清洁机器人在所述地毯面的覆盖区域内以直线路径进行清扫,并实时获取所述清洁机器人在所述覆盖区域的实时位置;
11、当检测到所述清洁机器人到达所述地毯面的内周侧边缘时,控制所述清洁机器人掉头继续在所述覆盖区域内以直线路径进行移动清扫。
12、在其中一实施例中,所述控制所述清洁机器人绕所述地毯面的外周侧边缘移动清扫至少一周,包括:
13、当检测到所述待清洁表面为地毯面后,获取所述地毯面的外周侧边缘;
14、根据得到的所述地毯面的外周侧边缘,控制所述清洁机器人绕所述地毯面的外周侧边缘移动清扫至少一周。
15、在其中一实施例中,所述获取所述地毯面的外周侧边缘,包括:
16、分别获取所述清洁机器人的实时移动位置的两侧的所述待清洁表面的材质特性;
17、当检测到所述清洁机器人一侧的所述待清洁表面为所述地毯面、另一侧的所述待清洁表面为非地毯面时,判断所述实时移动位置为所述地毯面的外周侧边缘。
18、在其中一实施例中,控制所述清洁机器人以普通清洁模式对清洁区域的待清洁表面进行清扫,所述控制所述清洁机器人对所述地毯面的覆盖区域进行清扫,包括:
19、控制所述清洁机器人由所述普通清洁模式调整为地毯清洁模式,控制所述清洁机器人在所述地毯清洁模式下对所述地毯面的覆盖区域进行清扫。
20、在其中一实施例中,所述控制所述清洁机器人对所述地毯面的覆盖区域进行清扫之后,包括:
21、当所述清洁机器人完成所述地毯面的覆盖区域的清扫后,控制所述清洁机器人离开所述地毯面的覆盖区域;
22、控制所述清洁机器人由所述地毯清洁模式调整为原来的所述普通清洁模式,并控制所述清洁机器人按照所述普通清洁模式对所述地毯面的覆盖区域之外的清洁区域进行清扫。
23、在其中一实施例中,所述控制所述清洁机器人离开所述地毯面的覆盖区域,包括:
24、控制所述清洁机器人移动至所述地毯面的覆盖区域的内周侧边缘,使所述清洁机器人到达距离所述当前外侧边缘点最近的内侧边缘点;
25、控制所述清洁机器人由所述内侧边缘点移动至所述地毯面的覆盖区域外的所述当前外侧边缘点。
26、此外,本发明还提供了一种清洁机器人的清扫控制系统,包括:
27、清洁表面材质检测模块,用于在所述清洁机器人对清洁区域的待清洁表面进行清扫的过程中,实时获取所述待清洁表面的材质特性;
28、地毯区域获取模块,与所述清洁表面材质检测模块通信连接,用于当识别所述待清洁表面为地毯时,控制所述清洁机器人绕所述地毯面的外周侧边缘移动清扫至少一周,并标记出所述地毯面的覆盖区域;
29、地毯清扫控制模块,与所述地毯区域获取模块通信连接,用于控制所述清洁机器人由当前外侧边缘点移动至所述地毯面上,并控制所述清洁机器人对所述地毯面的覆盖区域进行清扫。
30、此外,本发明还提供了一种清洁机器人,包括:
31、机器人主体;
32、控制器,设于所述机器人主体上;
33、其中,所述控制器用于:
34、控制所述清洁机器人对清洁区域的待清洁表面进行清扫,并实时获取所述待清洁表面的材质特性;
35、当检测到所述待清洁表面为地毯面时,控制所述清洁机器人绕所述地毯面的外周侧边缘移动清扫至少一周,并标记出所述地毯面的覆盖区域;
36、控制所述清洁机器人由当前外侧边缘点移动至所述地毯面上,并控制所述清洁机器人对所述地毯面的覆盖区域进行清扫。
37、本发明提供的技术方案,具有以下优点:
38、本发明提供的清洁机器人的清扫控制方法、系统及清洁机器人,通过监测待清洁表面的材质特性,当识别待清洁表面为地毯时,控制清洁机器人首先围绕地毯面的外周侧边缘移动清扫至少一周,并标记地毯面的覆盖区域,之后从当前外侧边缘点移动至地毯面上,控制清洁机器人对地毯面的覆盖区域进行清扫,从而可以提高地毯与地面交界处的清扫效果,还可以降低清洁机器人反复的上下地毯覆盖效率低的问题。
技术特征:
1.一种清洁机器人清扫控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的清洁机器人清扫控制方法,其特征在于,所述控制所述清洁机器人对所述地毯面的覆盖区域进行清扫,具体包括:
3.根据权利要求2所述的清洁机器人清扫控制方法,其特征在于,所述控制所述清洁机器人在所述地毯面的覆盖区域内直线往复清扫,具体包括:
4.根据权利要求1所述的清洁机器人清扫控制方法,其特征在于,
5.根据权利要求4所述的清洁机器人清扫控制方法,其特征在于,所述获取所述地毯面的外周侧边缘,包括:
6.根据权利要求1-5中任一项所述的清洁机器人清扫控制方法,其特征在于,控制所述清洁机器人以普通清洁模式对清洁区域的待清洁表面进行清扫,所述控制所述清洁机器人对所述地毯面的覆盖区域进行清扫,包括:
7.根据权利要求6所述的清洁机器人清扫控制方法,其特征在于,所述控制所述清洁机器人对所述地毯面的覆盖区域进行清扫之后,包括:
8.根据权利要求7所述的清洁机器人清扫控制方法,其特征在于,所述控制所述清洁机器人离开所述地毯面的覆盖区域,包括:
9.一种清洁机器人的清扫控制系统,其特征在于,包括:
10.一种清洁机器人,其特征在于,包括:
技术总结
本发明公开一种清洁机器人清扫控制方法、系统及清洁机器人,所述方法包括:控制清洁机器人对清洁区域的待清洁表面进行清扫,并实时获取待清洁表面的材质特性;当检测到待清洁表面为地毯面时,控制清洁机器人绕地毯面的外周侧边缘移动清扫至少一周,并标记出地毯面的覆盖区域;控制清洁机器人由当前外侧边缘点移动至地毯面上,并控制清洁机器人对地毯面的覆盖区域进行清扫。本发明提供的清洁机器人的清扫控制方法、系统及清洁机器人,能够有效提高地毯及其边缘的清洁效果。
技术研发人员:耿文峰,丘伟楠,薄慕婷
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!