全自动油炸食品点餐制作设备及使用方法
1.本发明涉及烹饪设备技术领域,具体的是一种全自动油炸食品点餐制作设备及使用方法。
背景技术:
2.随着科技的发展,在人类生产和生活中,自动化的水平逐渐提高,烹饪领域的自动化快速发展,各种自动化的烹饪设备或炒菜机器人逐渐进入厨房,以解放劳动力,便捷人们的生活。
3.油炸食品是人类食谱的重要组成部分,但油炸食品的制作往往涉及油温控制,炸制过程中的食材翻动以使其受热均匀,食材相互之间的黏连,高温油在炸制过程中的飞溅伤人等问题,油炸食品加工过程中的自动化往往难以实现。
4.此外,在餐厅经营过程中,顾客的点餐是差异化和多元化的,不同种类的油炸食物从点餐到制作全过程的自动化实现,一直是餐厅自动化烹饪设备设计和制造的难点,同时也是提高餐厅烹饪设备自动化程度的重要方向。
技术实现要素:
5.本发明的目的是提供一种结构简单、操作简单、生产效率高的全自动油炸食品点餐制作设备,可以实现油炸食品从点餐到制作过程的全程自动化操作。
6.本发明的技术方案是:
7.一种全自动油炸食品点餐制作设备,包括食材摆放架、食材转运机构、油炸机构和控制器,
8.所述食材摆放架上设有多个呈矩形阵列排布的单元格,具体的,食材摆放架上设有5行4列共计20个单元格,所述单元格内设有食材盒,所述食材盒靠近单元格开口的一侧设有与第一电磁铁相配合的食材盒吸板;
9.食材摆放架为方格状的架子,食材摆放架的单元格朝向油炸机构的一侧开口,食材摆放架的每个单元格内放置一个食材盒,食材盒为上端开口的方形结构,食材盒内盛放有待炸制的食材,例如腌制好的鱼或肉块,一个食材盒内的食材量为一份成品食物的量。
10.所述单元格开口处的底板上设有挡块。
11.单元格内的食材盒的取出和空盒的放回均是通过食材转运机构上第一电磁铁和食材盒吸板的配合实现的,在空食材盒放回单元格的过程中,第一电磁铁与食材盒吸板断开连接,食材盒吸板会有一定的概率磁化,磁化后的食材盒吸板较难与第一电磁铁分离,造成食材盒在单元格内移位,通过挡块可以限位食材盒,使断电的第一电磁体能够稳定的与食材盒吸板分离。
12.所述食材转运机构包括xyz三轴直线模组和第一电磁铁,xyz三轴直线模组的动作端通过旋转关节与第一电磁铁相连;
13.具体的,旋转关节可以使第一电磁铁和xyz三轴直线模组的动作端进行360
°
旋转,
可以采用机械手关节,转台等结构。
14.在本发明中,食材摆放架、油炸机构和食材转运机构依次排列,三者的相对位置关系确定,食材摆放架上每个单元格对应一个特定的空间位点,并录入控制器内,每个单元格内的食材盒所盛放的食材种类固定,并与该空间位点对应。xyz三轴直线模组的动作端和第一电磁铁之间设置旋转关节,使第一电磁铁具备停靠在xyz三轴直线模组所覆盖的三维空间中任意一点且能周向自转的能力。
15.所述油炸机构包括升降机构、方形的炸锅和方形的炸筐,所述炸筐包括网状的筐体和把手,所述筐体内设有两个压篦,所述压篦包括篦轴和设置于篦轴上的多个篦齿,篦齿垂直于篦轴并沿篦轴的长度方向均匀分布,两个压篦分别与炸筐内侧两个相互平行的侧壁转动相连,两个压篦在炸筐的竖直方向上间隔设置,所述篦轴的一个端部贯穿筐体并位于筐体外侧,所述筐体外侧的篦轴端部上设有压杆,压杆的中部与篦轴的端部固定相连,压杆分别垂直于篦轴和篦齿,所述压杆和筐体之间设有将篦齿抵于筐体上沿的拉簧,所述筐体底壁为波浪形,所述升降机构的下端与炸锅固定相连,升降机构的上端设有第二电磁铁,所述把手的末端设有与第一电磁铁相配合的吸座,把手的中部下侧设有与第二电磁铁相配合的把手吸板;
16.炸锅内盛有食用油,炸锅底部设有加热管和温度传感器,用于控制炸锅内食用油的温度。加热管的工作受控制器控制,温度传感器与控制器信号相连,炸筐用于盛放食材在油锅内炸制,炸制结束后,可将炸筐升至油面上方,并在油面上方完成沥油操作。
17.具体的,升降机构为电动推杆,电动推杆的下端与炸锅的侧壁相连,电动推杆的上端通过第二电磁铁与炸筐的把手中部的把手吸板相连,电动推杆用于驱动炸筐沿竖直方向上下移动,电动推杆通过控制器控制。
18.筐体上沿用不锈钢杆圏成矩形筐沿,用于承载网状的筐体。把手呈l形,把手的竖臂与筐体固定相连,把手的横臂平行于筐沿所在平面并向炸锅外侧延伸至升降机构的上方,通过把手吸板与第二电磁铁配合。
19.炸锅的内腔和炸筐均为长方体状,炸锅的内腔尺寸略大于炸筐尺寸。两个压篦分为左压篦和右压篦,左、右压篦的篦轴均平行于炸筐的长度方向,并分别与炸筐的左侧壁和右侧壁转动相连,竖直方向上,左压篦在上,右压篦在下。
20.具体的,炸筐的左侧壁和右侧壁上分别设有篦轴连板,篦轴连板的一侧与炸筐内侧壁通过焊接或铆钉固定相连,篦轴连板的另一侧设有轴线平行于篦轴连板的轴套,轴套与篦轴连板固定相连。篦轴设置于轴套内,从而使篦轴可以与炸筐的侧壁转动连接。
21.压篦的作用在于封闭和开放炸筐,压篦的篦齿处于水平状态时,炸筐封闭,压篦可以将食材压在炸筐内侧,使炸筐没入炸锅内油面之下时,食材不会漂浮至油面之上,防止食材上下表面受热不均匀,省去翻动食材的操作步骤。压篦的篦齿处于竖直状态时,篦齿贴合于炸筐的内侧壁,炸筐开放,可以将食材盒内的食材倒入炸筐。本发明的左、右压篦上下间隔设置,位于下部的右压篦将筐体分成上下两层,从而可以同时炸制两份食材,提高炸制效率。
22.由于炸筐需要浸入高温油中,压篦的转动难以通过电动装置实现,本发明中,篦齿的转动通过拉簧、压杆和炸锅内壁的配合予以实现。拉簧的一端与压杆的端部固定相连,拉簧的另一端与筐体固定相连。炸筐在脱离炸锅时,在拉簧的作用下,篦齿保持竖直状态,抵
于筐体上沿,此时压杆处于水平状态,压杆延伸出炸筐的长度和炸筐的宽度之和大于炸锅内腔的宽度。当升降机构通过把手带动炸筐进入炸锅时,压杆与炸锅的锅沿触碰,炸筐继续下移,在炸锅的限位下,压杆克服弹簧的拉力带动篦轴转动,当压杆完全进入炸锅内时,压杆保持竖直状态,篦齿水平。
23.左压篦和右压篦上下间隔设置,先在筐体底部设置一层食材,炸筐部分进入炸锅,在竖直方向上,使炸锅锅沿位于左压篦和右压篦之间时,右压篦的篦齿水平,左压篦的篦齿竖直,再向炸筐内倒入一盒食材,炸筐继续下移,至完全没入油面以下,左压篦的篦齿也保持水平状态,通过上述设置可以同时炸制两份食材,有效的提高了炸锅的利用效率,对于同类食物的快速备餐,具有重要作用。
24.控制器控制食材转运机构和油炸机构。
25.控制器控制xyz三轴直线模组、旋转关节、第一电磁铁、升降机构、第二电磁铁、炸锅内油温控制。
26.优选的,餐厅前台设有前台点餐系统,前台点餐系统与控制器信号连接,控制器接收到前台点餐系统的点餐指令后,进行食材的加工操作。
27.优选的,筐体底壁为波浪形。
28.具体的,筐体底壁通过横波浪和纵波浪分隔成多个方格,类似于鸡蛋蛋托结构,倒入筐体内的食材在横波浪和纵波浪的作用下,分隔到不同的方格内,该设置在一定程度上可以减少不同食材块之间的黏连,防止将多个食材块炸制成一个整体,造成炸制不均匀的情况。
29.所述油炸机构包括锅盖组件,锅盖组件设置于炸锅的一侧,所述锅盖组件包括锅盖、锅盖摆臂和驱动锅盖摆臂摆动的电机,锅盖摆臂的一端与电机的输出轴固定相连,锅盖摆臂的另一端与锅盖固定相连。
30.食材的炸制过程中,会造成高温油的飞溅,容易伤人或污染环境,本发明通过伺服电机驱动锅盖摆臂转动进而带动锅盖转动,来实现炸锅的扣盖和掀盖。伺服电机通过控制器控制。
31.进一步的,所述电机输出轴的两侧分别设有接近开关,接近开关与控制器信号相连。
32.两个接近开关分别对应锅盖摆臂在扣盖和掀盖状态下的位置。
33.所述压杆的端部设有球形或圆柱形的滑块。
34.炸筐下压进入锅体的过程中,压杆的端部会与锅体内壁相抵,进而与锅体内壁摩擦,久而久之,使锅体内侧壁磨损。通过设置滑块,利用滑块的球面或柱面与锅体内壁接触,可大大减少压杆对锅体内壁的磨损,提高设备使用寿命。
35.全自动油炸食品点餐制作设备的使用方法,包括下列步骤:
36.s1:备料,将食材放入食材盒内,并将食材盒分别放入食材摆放架的单元格内;
37.s2:食材炸制,控制器接受点餐指令,控制器控制xyz三轴直线模组将点餐指令中对应的食材盒取出,并移动至炸锅上方,通过旋转关节,将食材盒内的食材倒入炸筐内,xyz三轴直线模组将空的食材盒放回单元格内,升降机构控制炸筐下移并没入炸锅内的油面之下进行食材炸制;
38.单元格内的食材种类固定,单元格的空间位置录入控制器内,控制器可以根据点
餐指令控制xyz三轴直线模组取出特定的食材盒。
39.具体的,控制器控制xyz三轴直线模组的动作端到达单元格处,使第一电磁铁与食材盒吸板贴合,电磁铁通电,吸住食材盒,xyz三轴直线模组的动作端上移,使食材盒越过挡块,xyz三轴直线模组将食材盒转运至炸筐的上方,通过旋转关节转动,将食材倒入炸筐内。xyz三轴直线模组将空的食材盒放回单元格内,第一电磁铁断电,xyz三轴直线模组复位。
40.控制器内设置不同食材的炸制程序,包括油温控制和炸制时间等。
41.炸筐没入油面后,控制器控制锅盖组件,将锅盖盖于炸锅上。
42.s3:沥油,食材炸制完成后,锅盖打开,升降机构将炸筐升至炸锅内油面之上进行沥油;
43.s4:装盘,沥油结束后,xyz三轴直线模组和旋转关节,将炸筐内炸制好的食材倒入餐盘内。
44.具体的,沥油结束后,xyz三轴直线模组的第一电磁铁吸住把手的吸座,第二电磁铁断电,升降机构与把手的连接解除,xyz三轴直线模组将炸筐转运至炸锅一侧的餐盘上方,并将食材倒入餐盘。
45.优选的,餐盘设置于配餐机器人上。
46.当点餐指令中涉及两份以上同种食材的炸制命令时,可通过双层的炸筐进行两份食材的同时炸制。
47.具体的,
48.s2的食材炸制步骤包括单份炸制步骤和双份炸制步骤,
49.单份炸制步骤中,一次炸制一个食材盒内的食材,食材盒内的食材倒入炸筐后,升降机构将炸筐整体没入炸锅油面之下;
50.双份炸制步骤中,一次炸制两个食材盒内的食材,首先将一个食材盒内的食材倒入炸筐内,升降机构将炸筐下移,使炸筐内位于竖直方向下部的压篦即右压篦下降至炸锅锅沿以下,右压篦的篦齿处于水平状态,而炸筐内位于竖直方向上部压篦即左压篦的篦齿与筐体上沿保持相抵的状态,然后将第二个食材盒内的食材倒入炸筐内,第二个食材盒内的食材承载于右压篦的篦齿上方,升降机构驱动炸筐继续下移,左压篦的篦齿水平,将炸筐全部没入炸锅油面之下进行食材的炸制。
51.进行双份炸制时,炸制结束后,炸筐升至油面之上,右压篦在拉簧的作用下向上转动,位于右压篦上的食材被挤压与右压篦和右侧壁之间,拉簧的拉力不宜过大,炸筐翻转后,在食材自重以及篦齿表面食用油的润滑下,食材可以顺利倒出。
52.本发明具有的优点和积极效果是:本发明实现了油炸食品由点餐到加工到配餐全程自动化过程,可进行双份食材的同时炸制,食材之间黏连概率低,炸制效果好,安全性高,使用寿命长。
附图说明
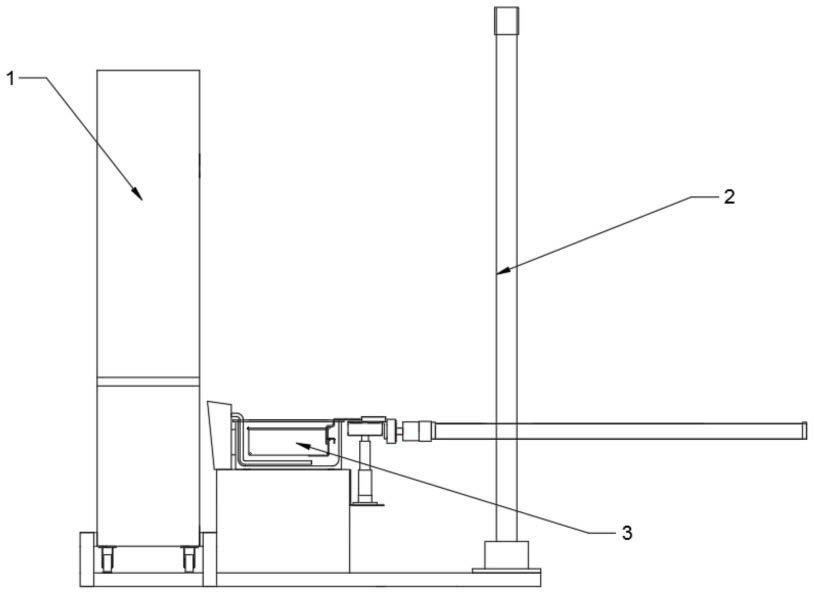
53.图1是本发明的结构原理示意图
54.图2是食材摆放架的结构原理示意图
55.图3是食材转运机构与油炸机构的结构原理示意图
56.图4是锅盖组件的结构原理示意图
57.图5是左压篦竖直右压篦水平状态时炸筐和炸锅的结构原理示意图
58.图6是压篦的结构示意图
59.图7是炸框底壁的示意图
60.图中:
61.1、食材摆放架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2、食材转运机构
ꢀꢀꢀꢀꢀꢀꢀꢀ
3、油炸机构
62.11、单元格
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12、食材盒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13、食材盒吸板
63.14、挡块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21、xyz三轴直线模组
ꢀꢀꢀꢀ
22、第一电磁铁
64.31、升降机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32、炸锅
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33、筐体
65.34、把手
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
35、左压篦
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
36、右压篦
66.37、篦轴连板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
38、锅盖组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311、第二电磁铁
67.341、吸座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
342、把手吸板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
351、篦轴
68.352、篦齿
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
353、压杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
354、拉簧
69.371、轴套
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
381、锅盖
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
382、锅盖摆臂
70.383、电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
384、接近开关
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3531、滑块
具体实施方式
71.如图1所示,本发明:
72.一种全自动油炸食品点餐制作设备,包括食材摆放架1、食材转运机构2、油炸机构3和控制器,
73.如图2所示,
74.所述食材摆放架上设有多个呈矩形阵列排布的单元格11,所述单元格内设有食材盒12,所述食材盒靠近单元格开口的一侧设有与第一电磁铁相配合的食材盒吸板13;
75.如图3、5、6所示,
76.所述食材转运机构2包括xyz三轴直线模组21和第一电磁铁22,xyz三轴直线模组的动作端通过旋转关节与第一电磁铁22相连;
77.所述油炸机构3包括升降机构31、方形的炸锅32和方形的炸筐,所述炸筐包括网状的筐体33和把手34,所述筐体内设有两个左压篦35和右压篦36,左压篦和右压篦均包括篦轴351和设置于篦轴上的多个篦齿352,篦齿垂直于篦轴并沿篦轴的长度方向均匀分布,左压篦35和右压篦36的篦轴分别通过篦轴连板37与筐体的左侧壁和右侧壁转动相连。篦轴连板37的一侧与炸筐内侧壁通过焊接或铆钉固定相连,篦轴连板的另一侧设有轴线平行于篦轴连板的轴套371,轴套371与篦轴连板固定相连。篦轴351设置于轴套371内,从而使篦轴可以与炸筐的侧壁转动连接。左压篦和右压篦在竖直方向上间隔设置,左压篦位于竖直方向的上方,所述篦轴351的一个端部贯穿筐体并位于筐体外侧,所述筐体外侧的篦轴端部上设有压杆353,压杆的中部与篦轴的端部固定相连,压杆分别垂直于篦轴351和篦齿352,所述压杆353和筐体33之间设有将篦齿抵于筐体上沿的拉簧354,所述升降机构31的下端与炸锅32固定相连,升降机构的上端设有第二电磁铁311,所述把手34的末端设有与第一电磁铁相配合的吸座341,把手的中部下侧设有与第二电磁铁311相配合的把手吸板342;
78.控制器控制食材转运机构和油炸机构。
79.如图7所示,
80.所述筐体33底壁为波浪形,
81.所述单元格11开口处的底板上设有挡块14。
82.如图4所示,
83.所述油炸机构包括锅盖组件38,锅盖组件设置于炸锅的一侧,所述锅盖组件包括锅盖381、锅盖摆臂382和驱动锅盖摆臂摆动的电机383,锅盖摆臂的一端与电机的输出轴固定相连,锅盖摆臂的另一端与锅盖固定相连。
84.所述电机输出轴的两侧分别设有接近开关384,接近开关与控制器信号相连。
85.所述压杆的端部设有圆柱形的滑块3531。
86.全自动油炸食品点餐制作设备的使用方法,包括下列步骤:
87.本实例的工作过程:
88.s1:备料,将食材放入食材盒内,并将食材盒分别放入食材摆放架的单元格内;
89.s2:食材炸制,控制器接受点餐指令,控制器控制xyz三轴直线模组将点餐指令中对应的食材盒取出,并移动至炸锅上方,将食材盒内的食材倒入炸筐内,xyz三轴直线模组将空的食材盒放回单元格内,升降机构控制炸筐下移并没入炸锅内的油面之下进行食材炸制;
90.s3:沥油,食材炸制完成后,升降机构将炸筐升至炸锅内油面之上进行沥油;
91.s4:装盘,沥油结束后,xyz三轴直线模组将炸筐内炸制好的食材倒入餐盘内。
92.s2的食材炸制步骤包括单份炸制步骤和双份炸制步骤,
93.单份炸制步骤中,一次炸制一个食材盒内的食材,食材盒内的食材倒入炸筐后,升降机构将炸筐整体没入炸锅油面之下;
94.双份炸制步骤中,一次炸制两个食材盒内的食材,首先将一个食材盒内的食材倒入炸筐内,升降机构将炸筐下移,使炸筐内位于竖直方向下部的压篦下降至炸锅锅沿以下,炸筐内位于竖直方向下部压篦的篦齿处于水平状态,而炸筐内位于竖直方向上部压篦的篦齿与筐体上沿保持相抵的状态,然后将第二个食材盒内的食材倒入炸筐内,第二个食材盒内的食材承载于炸筐内竖直方向下部压篦的篦齿上方,升降机构将炸筐全部没入炸锅油面之下进行食材的炸制。
95.以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1