一种跨防火墙的轨道机器人系统的制作方法
1.本发明涉及轨道机器人技术领域,具体为一种跨防火墙的轨道机器人系统。
背景技术:
2.随着现代社会的发展,输变电站室内、城市地下综合管廊等地方的日常检测和维护逐渐实现由轨道机器人机器人巡检代替了人工巡检,部分医院在隔离病房、药方和诊室之间也逐渐使用轨道机器人进行跨区域运送药品,如果遇到火灾,将会产生大量浓烟和气体,会损坏设备造成大量损失,根据《高层民用建筑设计防火规范》的相关规定,防火墙上不应开设门窗、洞口,当必开设时,应设置能自行关闭的甲级防火门窗,防火门窗关闭时需要将轨道进行分离;
3.在现有技术中,专利号为cn106346443a的中国专利提出了一种轨道对接装置及系统,用于对接分隔的不同区域之间的轨道,用于在不破坏防火门结构的前提下,使得分隔的不同区域之间的轨道实现对接,从而使轨道上的轨道机器人能够沿着对接后的轨道穿越不同区域,并且提供了一种轨道对接装置包括:驱动电机、活动轨道和对接轨道;驱动电机与活动轨道电性连接,使得活动轨道在驱动电机驱动下朝对接轨道方向驱动;活动轨道和对接轨道的邻接端均设置有活动连接的卡扣,使得活动轨道与对接轨道实现对接固定;活动轨道和对接轨道分别安装在防火门的门扇内外侧;
4.市面常见的跨防火墙轨道机器人,跨防火墙时轨道机器人需要停留在活动轨道,通过活动轨道在防火墙两侧的固定轨道之间移动,并分别与两段固定轨道进行对接,实现对轨道机器人跨防火墙输送,轨道机器人每次穿越防火墙均需要制动,大大降低了轨道机器人的工作效率,并且窗扇启闭控制装置,采用防火窗熔断装置和防火窗温控支撑杆,断电后密封效果大幅降低。
技术实现要素:
5.本发明的目的在于提供一种跨防火墙的轨道机器人系统,以至少解决现有技术轨道连接效率低、防火窗断电后密封效果差的问题。
6.为实现上述目的,本发明提供如下技术方案:一种跨防火墙的轨道机器人系统,其特征在于,包括:设置于防火墙右侧的立柱,所述防火墙的右侧内嵌安装有自动防火窗机构,顶棚底部通过若干个连接杆固定安装有两组固定导轨,两组所述固定导轨分别设置于防火墙左右两侧,每组所述固定导轨数量为两个且相互平行,两组所述固定导轨的位置相对应,位于防火墙右侧的所述固定导轨内侧设置有导轨连接机构,所述固定导轨的顶部设置有轨道小车组件,所述防火墙的右侧固定安装有控制器,且所述自动防火窗机构、导轨连接机构和轨道小车组件均与控制器电性连接。
7.优选的,所述自动防火窗机构包括:内嵌安装于所述防火墙右侧的窗框,所述窗框的右侧后端可旋转地安装有防火窗,所述立柱的前侧设置有自锁驱动组件,且所述自锁驱动组件与控制器电性连接。
8.优选的,所述自锁驱动组件包括:可旋转地安装在所述防火窗右侧前端的短连杆,所述短连杆的后端与立柱的前侧之间可旋转地连接有长连杆,所述长连杆的中间位置和立柱的前侧右端可旋转地安装有第一伸缩杆,且所述第一伸缩杆与控制器电性连接。
9.优选的,所述防火窗与窗框闭合时,所述短连杆与长连杆位于同一直线。
10.优选的,所述导轨连接机构包括:固定安装于顶棚底部的滑动组件,所述滑动组件与控制器电性连接,所述滑动组件的底部固定安装有连接组件。
11.优选的,所述滑动组件包括:固定安装于顶棚底部的两个滑轨,两个所述滑轨的底部均可滑动地安装有滑块,两个所述滑块的底部安装有移动座,所述移动座的顶部左端设置有驱动块,所述顶棚底部固定安装有第二伸缩杆,所述第二伸缩杆的输出端与驱动块固定连接,且所述第二伸缩杆与控制器电性连接。
12.优选的,所述连接组件包括:所述移动座底部固定安装的四个连接杆,四个所述连接杆的底部水平安装有两个移动轨,所述固定导轨的外侧内端均开设有支撑槽,且所述移动轨分别与支撑槽可滑动连接。
13.优选的,所述轨道小车组件包括:小车主体,所述小车主体四角设置有驱动轮,且所述驱动轮的底部与固定轨道的顶端接触,所述小车主体的左右两侧均设置有支撑杆,两个所述支撑杆的底部前后两侧均可旋转地安装有一组限位轮,每组所述限位轮的数量为两个,且对所述固定导轨的前后两侧进行限位。
14.本发明与现有技术相比的有益效果在于:
15.1、本发明通过控制器控制第一伸缩杆的输出端向左侧推动长连杆,在短连杆的连接作用下,推动防火窗向左侧关闭,当防火窗与窗框闭合时,短连杆与长连杆位于同一直线,此时防火窗通过短连杆对长连杆的力臂为零,使防火窗与窗框紧密接触且保持自锁状态,完成防火窗的关闭,因此,具有自锁特性,可以在断电后保持良好的密封效果。
16.2、本发明通过控制器控制第二伸缩杆的输出端带动移动座沿滑轨向左侧移动,移动轨沿右侧固定导轨的支撑槽向左滑动,直至第二伸缩杆推动驱动块到达左侧极限位置,即驱动块与防火墙接触,移动轨的左端插入左侧的支撑槽,完成移动轨的对接,轨道小车组件可以沿移动轨从防火墙一侧的固定导轨进入另一侧的固定导轨,位于固定导轨内侧或外侧的限位轮共同保持轨道小车组件的稳定,因此,可以自动地控制轨道分离和对接,对接后轨道小车可以直接通过,无须制动等待运送,大大提高了对接过程效率高和运行效率,且可承受较大的载荷。
附图说明
17.图1为本发明结构示意图;
18.图2为本发明关闭状态的结构示意图;
19.图3为本发明主视图;
20.图4为本发明关闭状态主视图;
21.图5为a处放大图;
22.图6为b处放大图;
23.图7为本发明俯视图;
24.图8为本发明关闭状态俯视图;
25.图9为本发明右视图;
26.图10为c处放大图。
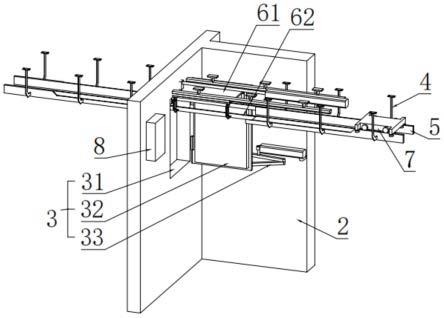
27.图中:2、立柱,3、自动防火窗机构,31、窗框,32、防火窗,33、自锁驱动组件,331、短连杆,332、长连杆,333、第一伸缩杆,4、连接杆,5、固定导轨,6、导轨连接机构,61、滑动组件,611、滑轨,612、滑块,613、移动座,614、第二伸缩杆,615、驱动块,62、连接组件,621、连接杆,622、支撑槽,623、移动轨,7、轨道小车组件,71、小车主体,72、驱动轮,73、支撑杆,74、限位轮,8、控制器。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.请参阅图1-10,本发明提供一种技术方案:一种跨防火墙的轨道机器人系统,其特征在于,包括:设置于防火墙右侧的立柱2,防火墙的右侧内嵌安装有自动防火窗机构3,顶棚底部通过若干个连接杆4固定安装有两组固定导轨5,两组固定导轨5分别设置于防火墙左右两侧,每组固定导轨5数量为两个且相互平行,两组固定导轨5的位置相对应,位于防火墙右侧的固定导轨5内侧设置有导轨连接机构6,固定导轨5的顶部设置有轨道小车组件7,防火墙的右侧固定安装有控制器8,且自动防火窗机构3、导轨连接机构6和轨道小车组件7均与控制器8电性连接。
30.作为优选方案,更进一步的,自动防火窗机构3包括:内嵌安装于防火墙右侧的窗框31,窗框31的右侧后端可旋转地安装有防火窗32,再具体实施中,根据相关法律要求,应选用甲级防火门窗,立柱2的前侧设置有自锁驱动组件33,且自锁驱动组件33与控制器8电性连接。
31.作为优选方案,更进一步的,自锁驱动组件33包括:可旋转地安装在防火窗32右侧前端的短连杆331,短连杆331的后端与立柱2的前侧之间可旋转地连接有长连杆332,长连杆332的中间位置和立柱2的前侧右端可旋转地安装有第一伸缩杆333,且第一伸缩杆333与控制器8电性连接,第一伸缩杆333的输出端向左侧推动长连杆322,在短连杆331的连接作用下,推动防火窗32向左侧关闭。
32.作为优选方案,更进一步的,防火窗32与窗框31闭合时,短连杆331与长连杆332位于同一直线,从而防火窗32通过短连杆331对长连杆332的力臂为零,使防火窗32与窗框31紧密接触且保持自锁状态,完成防火窗32的关闭。
33.作为优选方案,更进一步的,导轨连接机构6包括:固定安装于顶棚底部的滑动组件61,滑动组件61与控制器8电性连接,滑动组件61的底部固定安装有连接组件62,连接组件62用于对接防火墙两侧的固定导轨5。
34.作为优选方案,更进一步的,滑动组件61包括:固定安装于顶棚底部的两个滑轨611,两个滑轨611的底部均可滑动地安装有滑块612,两个滑块612的底部安装有移动座613,移动座613的顶部左端设置有驱动块615,顶棚底部固定安装有第二伸缩杆614,第二伸缩杆614的输出端与驱动块615固定连接,且第二伸缩杆614与控制器8电性连接。
35.作为优选方案,更进一步的,连接组件62包括:移动座613底部固定安装的四个连接杆621,四个连接杆621的底部水平安装有两个移动轨623,固定导轨5的外侧内端均开设有支撑槽622,且移动轨623分别与支撑槽622可滑动连接,更具体地移动轨623的外壁与固定导轨5的外壁应当位于同一平面,在具体实施中,控制器8控制第二伸缩杆614的输出端带动移动座613沿滑轨611向左侧移动,移动轨623沿右侧固定导轨5的支撑槽622向左滑动,直至第二伸缩杆614推动驱动块615到达左侧极限位置,即驱动块615与防火墙接触,移动轨623的左端插入左侧的支撑槽622,完成移动轨623的对接。
36.作为优选方案,更进一步的,轨道小车组件7包括:小车主体71,小车主体71四角设置有驱动轮72,且驱动轮72的底部与固定轨道5的顶端接触,小车主体71的左右两侧均设置有支撑杆73,两个支撑杆73的底部前后两侧均可旋转地安装有一组限位轮74,每组限位轮74的数量为两个,且对固定导轨5的前后两侧进行限位,从而保证驱动轮72与固定导轨5或移动轨623的位置关系。
37.其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,具体工作如下。
38.步骤一,当防火门关闭时,控制器8控制第二伸缩杆614的输出端带动移动座613沿滑轨611向右侧移动,移动座613底部的移动轨623与左侧的固定导轨5的支撑槽622分离,移动轨623沿右侧固定导轨5的支撑槽622向右滑动,直至移动轨623收入右侧的支撑槽622,完成移动轨623的分离;
39.步骤二,控制器8控制第一伸缩杆333的输出端向左侧推动长连杆322,在短连杆331的连接作用下,推动防火窗32向左侧关闭,当防火窗32与窗框31闭合时,短连杆331与长连杆332位于同一直线,此时防火窗32通过短连杆331对长连杆332的力臂为零,使防火窗32与窗框31紧密接触且保持自锁状态,完成防火窗32的关闭;
40.步骤三,当开启防火窗32时,控制器8控制第一伸缩杆333的输出端带动长连杆332向右侧旋转,通过短连杆331拉动防火窗32向右侧旋转开启,控制器8控制第二伸缩杆614的输出端带动移动座613沿滑轨611向左侧移动,移动轨623沿右侧固定导轨5的支撑槽622向左滑动,直至第二伸缩杆614推动驱动块615到达左侧极限位置,即驱动块615与防火墙接触,移动轨623的左端插入左侧的支撑槽622,完成移动轨623的对接,轨道小车组件7可以沿移动轨623从防火墙一侧的固定导轨5进入另一侧的固定导轨5,当轨道小车组件7行驶到支撑槽622的位置时,位于固定导轨5内侧的四个限位轮74共同保持轨道小车组件7的稳定,当轨道小车组件7行驶到移动轨623的位置时,位于固定导轨5外侧的四个限位轮74共同保持轨道小车组件7的稳定;
41.本发明采用常开式防火窗,可以自动地控制轨道分离和对接,对接过程效率高,可承受较大的载荷,自动防火窗具有自锁特性,可以在断电后保持密封效果。
42.以上实施例的各技术特征可以任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的
精神和范围,也应该视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1