多向除尘工具的制作方法
1.本专利公开总体上涉及清洁工具,并且更特别地涉及除尘工具。
背景技术:
2.已经提出了多种工具来促进除尘。一些除尘工具包括刚性或半刚性杆件,其上安装有具有多个纤维区段的清洁布。除尘工具可以附接到相对较短的手柄单元上以便对容易接近的表面进行除尘,或者附接到拉杆或撑杆上以使除尘工能够到达高处的表面。在使用中,除尘工具在要清洁的表面上移动,进而使灰尘颗粒落入纤维区段中。
3.然而,这些装置中的许多在有效性或易用性方面存在限制。例如,这种类型的除尘工具的杆件通常具有刚性设计,这使得清洁弯曲表面变得困难或更为耗时。当使用加长拉杆或撑杆时,因为除尘工具的刚性区段可能无法适应远程曲面,这一挑战会更加严重。此外,高处的表面的边缘区域和角落可能很困难地才能到达。
4.授予dingert的美国专利8,136,196公开了一种柔性除尘工具。该装置包括两个杆件,该两个杆件通过薄膜铰链连接到在杆件之间延伸的间隔件。施加在杆件的一个或另一个平坦外表面上的法向力致使杆件成弧形,从而允许除尘工具在垂直于杆件和薄膜铰链的平面内绕物体弯曲。
技术实现要素:
5.在一个方面,本公开描述了一种具有柔性骨架元件的除尘工具,该柔性骨架元件包括基部,四个细长臂从该基部延伸。细长臂具有基部端和远侧端。基部端从基部延伸,并且在基部处彼此间隔开。臂是柔性且有弹性的。多个横向构件在细长臂之间延伸,多个活动铰链设置在多个横向构件与细长臂之间。施加到细长臂中的至少一个细长臂上的力通过多个横向构件和多个活动铰链传递到细长臂中的另外的细长臂上。
6.在另一方面,本公开描述了具有一体成型的柔性骨架元件和手柄组件的除尘工具。柔性骨架元件包括基部,四个细长臂从该基部延伸。柔性骨架元件的基部联接到手柄组件。细长臂具有基部端和远侧端。基部端从基部延伸并在基部处彼此间隔开。臂是柔性且有弹性的。多个横向构件在细长臂之间延伸,多个活动铰链设置在多个横向构件与细长臂之间。施加到细长臂中的至少一个细长臂上的力通过多个横向构件和多个活动铰链传递到细长臂中的另外的细长臂上。
附图说明
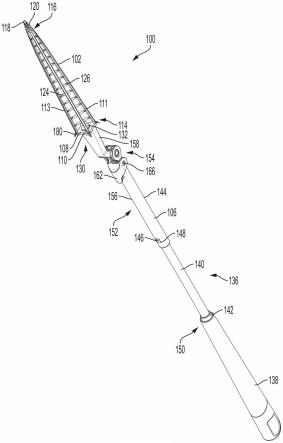
7.图1是根据本公开的一些方面的除尘工具的立体图。
8.图2是图1的除尘工具的侧视图。
9.图3是图1和图2的除尘工具的侧视图,示出了应用到该工具上的除尘布元件。
10.图4是沿图2中的线4-4截取的图1至图3的除尘工具的柔性骨架元件的放大剖视图。
11.图5是图1至图4的除尘工具的放大俯视图。
12.图6是图1至图5的除尘工具的放大仰视图。
13.图7是沿图5中的线7-7截取的图1至图6的除尘工具的放大局部剖视图。
14.图8是图1至图7的除尘工具的远侧端的放大局部视图,示出了力的施加。
15.图9是图1至图8的除尘工具的远侧端的放大局部视图,示出了力的施加。
16.图10是沿图5中的线10-10截取的图1至图9的除尘工具的剖视图。
17.图11是图10所示的除尘工具的放大局部图。
18.图12是图1至图11的除尘工具的侧视图,以虚线示出了替代位置。
19.图13是在存储位置和伸展位置的根据本公开的教示的除尘工具的替代实施方式的侧视图。
20.图14示出了处于组装位置和分解位置的如图13所示的除尘工具的放大局部立体图。
21.图15示出了处于组装位置和分解位置的如图13所示的手柄组件的立体图。
22.图16是柔性骨架元件的一个替代实施方式的立体图。
23.图17是柔性骨架元件的一个替代实施方式的立体图。
具体实施方式
24.本公开涉及一种除尘工具100,该除尘工具在物体周围进行除尘时会是特别有用的。除尘工具100包括柔性骨架元件102,除尘布元件104可以联接到该柔性骨架元件上以用于收集灰尘(例如,参见图3)。手柄组件106可以联接到骨架元件102以便于操纵骨架元件102。
25.柔性骨架元件102包括基部108,至少三个细长臂从该基部延伸,所示实施方式包括四个细长臂110、111、112、113。细长臂110、111、112、113各自具有基部端114和远侧端116。细长臂110、111、112、113的基部端114以间隔关系从基部108延伸。而细长臂110、111、112、113可以以基本上任何构造与基部108固定在一起,在所示实施方式中,细长臂110、111、112、113设置成基本上正方形构造,但是基部108本身不必须是正方形形状。
26.细长臂110、111、112、113相似地在它们的远侧端116处联接。虽然细长臂110、111、112、113可以以基本上平行的关系设置,但是例如细长臂110、111、112、113也可以朝向彼此会聚。虽然不一定在所有实施方式中都提供,但是柔性骨架元件102还可以包括远侧元件118,细长臂110、111、112、113的远侧端116连接到该远侧元件,远侧元件118将细长臂110、111、112、113在它们的远侧端116处联接在一起。在所示实施方式中,远侧元件118具有圆锥形形状,但是远侧元件118也可以是任何合适的形状。为了有助于将除尘布元件104在柔性骨架元件102上保持就位,远侧元件118可以包括多个肋120。
27.当向细长臂110、111、112、113中的一个或多个细长臂的长度施加力时,细长臂110、111、112、113既是柔性的又是弹性的。虽然细长臂110、111、112、113可以具有允许这种柔性且弹性的运动的基本上任何横截面,但是在至少一个实施方式中,细长臂110、111、112、113具有基本上圆形的横截面且带有向内指向的突出部122(参见图4)。
28.柔性骨架元件102还包括在细长臂110、111、112、113之间延伸的多个横向构件124。为了为柔性骨架元件102提供进一步柔性,提供了多个活动铰链126设置在该多个横向
构件124与细长臂110、111、112、113之间。为了本公开的目的,术语“活动铰链”是指减薄区段或具有减小截面的区域,其相对于相邻结构(在此例中是相邻的横向构件124和细长臂110、111、112、113)提供了额外的柔性。活动铰链126可以在图7的剖视图中最佳地看到。
29.横向构件124可以在细长臂110、111、112、113之间呈现任何适当的形状,并且可以具有相同或不同的形状。为了使横向构件与细长臂110、111、112、113的弯曲的干涉最小,横向构件具有基本上平面的结构。虽然一个或多个横向构件124可以具有正方形或矩形形状,但是例如横向构件124也可以包括呈大致平面的x形的横向构件臂128,如图4所示。如图7所示,例如,横向构件臂128可以包括减薄的外端,该减薄的外端包括相应的活动铰链126。
30.细长臂110、111、112、113与横向构件124和活动铰链126相结合的柔性有助于柔性骨架元件102在使用中在多个方向上绕障碍物弹性弯曲或挠曲。也就是说,当力施加到细长臂110、111、112、113中的一个或多个细长臂时,力通过活动铰链126和横向构件124传递到其余细长臂110、111、112、113上,而细长臂110、111、112、113的基部端114和远侧端116被维持在它们各自的相对位置。
31.柔性骨架元件102的柔性可以参照图8和图9来解释。无论将力f施加到细长臂110、111、112、113中的单一一个细长臂,还是施加到细长臂110、111、112、113中的一对细长臂,基部108和远侧元件118均维持细长臂110、111、112、113的基部端114与远侧116的相对位置。但是,当施加力f时,力同样通过多个横向构件124传递到另外的细长臂110、111、112、113。也就是说,活动铰链126弯曲以在传递力的同时允许该多个横向构件124的位置相对于细长臂110、111、112、113改变,从而最终沿着细长臂110、111、112、113的长度调整细长臂110、111、112、113的相对位置。由于施加到细长臂110、111、112、113中的至少一个细长臂上的力,设置在至少其中一个横向构件124与所述细长臂110、111、112、113之间的活动铰链126弯曲。由此,减少了细长臂110、111、112、113中的至少两个细长臂的至少部分长度之间的距离。
32.图8示出了力f1以基本垂直的角度施加到细长臂110、111、112、113中的单一一个细长臂112上,而图9示出了力f2以基本上垂直的角度施加到细长臂110、111、112、113中的一对细长臂112、113上。如可以在图8和图9看见的,当力f施加到细长臂110、111、112、113中的一个或多个上时,活动铰链126允许横向构件124相对于细长臂110、111、112、113倾斜,从而允许细长臂110、111、112、113中的至少两个细长臂的至少一部分长度移动而彼此靠近,以允许柔性骨架元件102响应于施加的力而弯曲。本领域技术人员可以理解的是,以替代角度施加到细长臂110、111、112、113中的一个或多个细长臂的力f同样可以致使装置的弹性弯曲或挠曲。取决于施加力时的角度,弯曲或挠曲可以包括细长臂110、111、112、113相对于彼此扭曲。例如,以替代角度向细长臂110、111、112、113中的一个细长臂110(参见图5)施加力f3可以致使细长臂110、111、112、113扭曲。因此,柔性骨架元件102提供了在多个平面上呈柔性的全向除尘工具100。以此方式,柔性骨架元件102可以允许使用者容易地在结构周围进行除尘。
33.柔性骨架元件102的一个替代实施方式例如在图16和图17中示出。首先转向图16,所示的柔性骨架元件202同样包括在基部208与远侧元件218之间延伸的四个细长臂210、211、212、213。多个横向构件224在多个活动铰链226处与细长臂210、211、212、213交会。然而,在该实施方式中,细长臂210、211、212、213在朝向远侧元件218会聚之前以基本平行的
关系延伸。图17示出了柔性骨架元件302,其包括三个细长臂310、311、312,而不是四个,这三个细长臂310、311、312在基部308与远侧元件318之间延伸。多个横向构件324与细长臂310、311、312在多个活动铰链326处交会。如图16的实施方式所示,细长臂310、311、312在朝向远侧元件318会聚之前以基本平行的关系延伸。然而,本领域技术人员将理解的是,细长臂310、311、312例如可以基本上是直的,从基部308向着彼此会聚到远侧元件318,类似于图1至图12的实施方式。柔性骨架元件202、302包括按钮等形式的突起232、332,该突起可以与手柄组件中的配合开口或类似物(未示出)接合。
34.柔性骨架元件102、202、302可以通过任何合适的方法以任何合适的材料制造,只要能为柔性骨架元件102、202、302提供期望的柔性和弹性即可。例如,柔性骨架元件102、202、302可以由诸如氯丁橡胶或热塑性聚氨酯的聚合材料形成,并且可以通过注塑、传递模塑或3-d打印形成。此外,柔性骨架元件102、202、302可以一体地形成或模制,或者其可以形成有插件,例如在基部108中。
35.回到图1-12,柔性骨架元件102可以通过任何适当的布置固定地或可旋转地联接到手柄组件106。虽然可以使用其他布置,但在所示实施方式中,手柄组件106的远侧端130包括有突起132,该突起被接纳在柔性骨架元件102的基部108的凹部134中。例如,在一个替代实施方式中,手柄组件106可以包括凹部,而基部108包括突起。在又一个实施方式中,可以提供夹子或紧固件来将柔性骨架元件102联接到手柄组件106,和/或柔性骨架元件102和手柄组件106可以通过粘合剂联接在一起。
36.手柄组件106可以包括细长部分136,该细长部分具有抓握元件138。抓握元件138可以例如包括带纹理的表面或柔韧的覆层,以便提高使用者在操作除尘工具100时的舒适度。
37.虽然手柄组件106可以是任何合适的设计,并且可以是固定长度或包括有允许手柄组件106有效缩短的结构。例如,手柄组件106的细长部分136可以包括伸缩结构。如本领域技术人员在观察图10时所将理解的,杆件区段140可以伸缩进出杆件区段142,杆件区段142支撑抓握元件138。
38.作为进一步的示例,手柄组件106的细长部分136可以包括允许将其拆卸的结构。同样如图10所示,可以将杆件区段144从杆件区段140拆下。虽然可以提供任何适当的布置以允许拆卸,但在所示实施方式中,杆件区段140设置有可按压按钮146,该可按压按钮被接纳在杆件区段144中的开口148中。按下按钮146使得按钮146能够从杆件区段144中的开口148脱开,从而允许将杆件区段140、144彼此分离。以此方式,手柄组件106包括近侧子组件150和远侧子组件152,该近侧子组件150包括杆件区段140、142,而该远侧子组件152包括杆件区段144。
39.作为又一示例,手柄组件106还可以包括选择性可枢转接头154,该选择性可枢转接头可枢转地联接第一相邻构件156和第二相邻构件158,用于绕轴线160进行相对旋转,如图10至图12所示。虽然可以利用任何适当的机构来致动和维持第一相邻构件156与第二相邻构件158的相对位置,但在所示实施方式中,选择性可枢转接头154包括联接至第一相邻构件156的致动器(在此为可致动杆162)、以及联接至第二相邻构件158的至少一个锁定构件164。该可致动杆162在轴线166处可枢转地联接至第一相邻构件156。如可以在图11中看到的,弹簧元件168将可致动杆162的接合指170偏置到与至少一个锁定元件164接合的位
置,以将第一相邻构件156和第二相邻构件158维持在预设的相对位置。
40.该至少一个锁定元件164可以包括一个或多个棘爪172,该棘爪设置为接纳可致动杆162的接合指170。在所示实施方式中,第二相邻构件158的棘爪172为用于接纳接合指170的开口174的形式。为了进一步固定第一相邻构件156与第二相邻构件158的相对位置,第一相邻构件160还包括凹部176。以此方式,当可致动杆162的接合指170朝棘爪172偏置时,接合指170延伸穿过第二相邻构件158的开口174并进入第一接合构件156的凹部176中,此时第一相邻构件156和第二相邻构件158处于延伸位置。相反地,当可致动杆162克服弹簧元件168的偏置而移动时,第二相邻构件158可以朝第一相邻构件156向下枢转,接合指沿着第二相邻构件158的外表面178行进,以使第二相邻构件158枢转到图12中虚线所示的位置。
41.在至少一个实施方式中,为了有助于将除尘布元件104在除尘工具100上维持就位,柔性骨架元件102的基部108和手柄组件106中的至少一者还包括多个向外延伸的突出部180。这些突出部180适合于与除尘布元件104接合。在一些实施方式中,突出部180可以接合除尘布元件104中的配合开口或凹部,而在一些实施方式中,突出部可以具有摩擦元件以便抑制除尘布元件104的运动。可以理解,虽然该特定实施方式包括多个向外延伸的突出部180,但其他实施方式可以包括更多或更少数量的突出部180。
42.例如,图13-15所示的包括有手柄组件206的除尘工具200的替代实施方式包括从手柄组件206而非从柔性骨架元件延伸的单个这样的向外延伸的突出部280。图13-15所示的手柄组件206可以包括具有抓握元件238的细长部分236,该抓握元件238可以包括带纹理的表面。手柄组件206可以进一步包括凹部235以允许除尘工具200方便地挂在钩子或类似物(未示出)上,或接纳环状结构(未示出)以允许环状结构将除尘工具200挂在钩子上。
43.手柄组件206包括伸缩结构,其允许手柄组件206从图13所示的延伸位置有效地缩短至图13所示的缩短位置以便进行销售或存储。特别地,如本领域技术人员在观察图13和图15时将理解的,杆件区段241可以伸缩进出杆件区段240,杆件区段240可以伸缩进出杆件区段242,杆件区段242支撑抓握元件238。
44.在所示实施方式中,插件237、239分别设置在杆件区段241、240的近侧端内并联接到杆件区段241、240的近侧端。插件237、239分别包括可按压按钮246、247,这些按钮由弹簧元件251、253偏置到向外位置而分别穿过杆件区段241、240的近侧端的开口248、249。为了便于将杆件区段241、240和242一起锁定和解锁,可按压按钮246、247进一步地在手柄组件206的细长部分236被组装并设置在延伸位置时分别通过杆件区段240、242的远侧端中的开口255、257被可移动地接纳。以此方式,使用者可以按下按钮246以允许杆件区段241、240相对于彼此伸缩滑动,以及按下按钮247以允许杆件区段240、242相对于彼此伸缩滑动。以此方式,细长部分236可以缩短至其长度的大约三分之一,如图13所示。
45.在图13-15的实施方式中,杆件区段244与杆件区段241联接。与第一实施方式一样,杆件区段241可以包括可按压按钮259,该按钮被接纳在杆件区段244中的开口261中。按钮259的按压允许按钮259从杆件区段244中的开口261脱离,从而允许杆件区段241、244彼此分离。以此方式,手柄组件206包括近侧子组件250和远侧子组件252,该近侧子组件包括杆件区段241、240、242,而该远侧子组件包括杆件区段244。
46.在图13-15的实施方式中,近侧子组件250和远侧子组件252可以维持在联接方式,方便地折叠到图13和14所示的缩回位置。即,手柄组件206还可以包括选择性可枢转接头
254,该选择性可枢转接头可枢转地联接第一相邻构件256和第二相邻构件258,用于绕轴线260进行相对旋转,如图13和14所示。在此实施方式中,第一相邻构件256与杆件区段244重合。
47.第二相邻构件258包括突起262,该突起262沿着轴线260设置在第一相邻构件256中的第一凹部或第一开口264内,同样沿着轴线260设置成可枢转地联接第一相邻构件256与第二相邻构件258(参见图14)。选择性可枢转接头254还包括锁定元件266,该锁定元件设置在第二相邻构件258的凹部268内,并且通过坐置于锁定元件266与突起262内的凹部272之间的弹簧元件270而沿着轴线260向外偏置。
48.锁定元件266包括可按压按钮274形式的致动器,该可按压按钮设置成穿过第一相邻构件256中的第二开口276,同样沿着轴线260设置。以此方式,可按压按钮274和第二相邻构件258的锁定元件266的突起262沿着轴线260设置,从而延伸穿过或进入第一相邻构件256的第一和第二开口264、276,以可枢转地联接第一相邻构件256与第二相邻构件258。
49.锁定元件266呈齿轮状结构的形式,其包括第一组突起或齿280和第二组突起或齿282。为了将锁定元件266可滑动地联接在第二相邻构件258的凹部268内,在凹部268内设置有多个第一凹部或第一凹槽284。以此方式,第一组齿280的齿与第二相邻构件258的多个第一凹部或第一凹槽284之间的接合允许锁定元件266由于弹簧元件270所致的向外偏置而沿着轴线260沿向外方向滑动,或通过可按压按钮274的按下而克服弹簧元件270的偏置沿向内方向滑动。
50.为了将第一相邻构件256和第二相邻构件258一起固定在期望的枢转位置,第一相邻构件256设置有第二组凹部或凹槽286。第二组凹部或凹槽286围绕第一相邻构件256的第二开口276设置。以此方式,当弹簧元件270在第二相邻构件258的凹部268内向外偏置锁定元件266时,第二组突起或齿282被接纳在第一相邻构件256的第二组凹部或第二凹槽286内。这种接合将第一相邻构件256与第二相邻构件258锁定在指定位置。当使用者按下锁定元件266的可按压按钮274时,随着第一组突起或齿280沿着多个第一凹部或第一凹槽284滑动,锁定元件266沿着轴线260滑动,以使第二组突起或齿282与第二组凹部或凹槽286脱离接合,从而允许第一相邻构件256和第二相邻构件258再次相对于彼此枢转。
51.本领域技术人员将理解,凹部或凹槽形成在突起或齿之间。因此,用于描述与锁定元件266以及第一和第二相邻构件256、258相关的结构的语言旨在同样包括具有多个凹部或凹槽的锁定元件266以及具有多个突起或齿的第一和第二相邻构件256、258。
52.应当理解,前面的描述提供了所公开的系统和技术的示例。然而,预期的是,本公开的其他实施方案可以与前面的示例在细节上有所不同。对本公开或其示例的所有参引都旨在以参引当时正在讨论的特定示例且并不旨在更一般地暗示对本公开范围有任何限制。关于特定特征的所有区别和贬低的语言是旨在表明不偏好这些特征,但除非另有说明,并不将其完全排除在本公开的范围之外。
53.除非本文另有指明或与上下文明显矛盾,在描述本发明的上下文中(尤其是在所附权利要求的上下文中)使用术语“一个”和“一”以及“所述”和“至少一个”以及类似的指称将被解释为涵盖单数和复数。除非本文另有指明或与上下文明显矛盾,使用术语“至少一个”后跟一个或多个项目的列表(例如,“a和b中的至少一个”)应解释为指从所列项目(a或b)中选择的一个项目、或两个或更多个所列项目(a和b)的任何组合。
54.除非本文另有说明,否则本文中各值范围的叙述仅旨在用作单独参引落入该范围内的每个单独值的简写方法,并且每个单独的值被结合到说明书中,就如同其在本文被单独叙述一样。除非本文另有指明或以其他方式与上下文明显矛盾,否则本文所述的所有方法都可以以任何合适的顺序进行。
55.因此,本公开包括在适用法律允许的情况下对所附权利要求中叙述的主题的所有修改和等同物。此外,除非本文另有指明或以其他方式与上下文明显矛盾,否则上述要素在其所有可能变体中的任何组合都包含在本公开中。
56.元件列表
57.标题:多向除尘工具
58.文件:fhp-21-0001
59.元件编号
ꢀꢀꢀꢀꢀꢀ
描述
60.100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
除尘工具
61.102
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
柔性骨架元件
62.104
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
除尘布
63.106
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
手柄组件
64.108
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
基部
65.110
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
细长臂
66.111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
细长臂
67.112
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
细长臂
68.113
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
细长臂
69.114
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
基部端
70.116
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
远侧端
71.118
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
远侧元件
72.120
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
肋
73.122
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
向内指向的突出部
74.124
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
多个横向构件
75.126
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
多个活动铰链
76.128
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
横向构件臂
77.130
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
手柄的远侧端
78.132
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
突起
79.134
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
凹部
80.136
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
手柄的细长部分
81.138
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
抓握元件
82.140
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段
83.142
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段
84.144
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段
85.146
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
可按压按钮
86.148
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
开口
87.150
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
近侧子组件
88.152
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
远侧子组件
89.154
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
选择性可枢转接头
90.156
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一相邻构件
91.158
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二相邻构件
92.160
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轴线(可枢转接头)
93.162
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
可致动杆
94.164
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
锁定元件
95.166
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轴线(锁定元件)
96.168
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
弹簧元件
97.170
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
接合指
98.172
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
棘爪
99.174
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
开口
100.176
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
凹部
101.178
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
外侧表面(第二相邻构件的)
102.180
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
向外延伸的突起
103.200
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
除尘工具
104.202
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
柔性骨架元件
105.208
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
基部
106.210、211、212、213 四个细长臂
107.218
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
远侧元件
108.224
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
多个横向构件
109.226
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
多个活动铰链
110.206
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
手柄组件
111.236
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
细长部分
112.235
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
凹部
113.237
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
插件
114.238
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
抓握元件
115.239
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
插件
116.240
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段
117.241
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段
118.242
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段
119.244
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段
120.246
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
可按压按钮
121.247
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
可按压按钮
122.248
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段241近侧端的开口
123.249
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段240近侧端的开口
124.250
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
近侧子组件
125.251
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
弹簧元件
126.252
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
远侧子组件
127.253
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
弹簧元件
128.254
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
选择性可枢转接头
129.255
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段240远侧端的开口
130.256
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一相邻构件
131.257
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段242远侧端的开口
132.258
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二相邻构件
133.259
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
可按压按钮
134.260
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轴线
135.261
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杆件区段244中的开口
136.262
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
突起
137.264
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一凹部或开口(第一相邻构件256中)
138.266
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
锁定元件
139.268
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
凹部(第二相邻构件258的)
140.270
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
弹簧元件
141.272
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
凹部(突起262内)
142.274
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
可按压按钮
143.276
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二开口(第一相邻构件256)
144.280
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一组突起或齿
145.282
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二组突起或齿
146.284
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一凹部或第一凹槽
147.286
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二凹部或第二凹槽
148.302
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
柔性骨架元件
149.308
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
基部
150.310、311、312 三个细长臂
151.318
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
远侧元件
152.324
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
多个横向构件
153.326
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
多个活动铰链
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1