一种便于清洗的炒菜机器人的制作方法
1.本发明涉及一种炒菜机器人,尤其涉及一种便于清洗的炒菜机器人。
背景技术:
2.随着人的生活水平不断的提高,部分餐饮店会使用到炒菜机器人,炒菜机器人能够代替人工,节省人工成本。
3.公开号为cn108814258a的中国专利公开了一种炒菜机器人,包括底板,所述底板的顶面固定有支撑板和支撑柱体,所述支撑板和支撑柱体之间设有锅体,锅体的形状为桶状,所述支撑板的侧面上部设有第一圆形通孔,所述支撑柱体的侧面上部设有第二圆形通孔,第二圆形通孔的尺寸与第一圆形通孔的尺寸相同,第二圆形通孔与第一圆形通孔的中心线相同,所述第二圆形通孔和第一圆形通孔内均固定有轴承,所述锅体的侧面对称固定有支撑轴,支撑轴的端部分别与其相对应的轴承过盈配合,所述支撑板的侧面固定有固定板,所述固定板的顶面有第一电机,上述专利虽然能够清洗,但只是通过转动锅体使得水自然流动对锅盖内壁进行清洗,水只是从锅盖内壁流过不具备冲击力,导致清洗效果不佳。
4.本发明旨在解决上述专利中存在的问题,为此,提出一种能够带动水向上移动具有冲击力对锅盖进行冲洗,清洗效果好的便于清洗的炒菜机器人。
技术实现要素:
5.为了克服上述专利虽然能够清洗,但只是通过转动锅体使得水自然流动对锅盖内壁进行清洗,不具备冲击力,导致清洗效果不佳的缺点,本发明提供一种能够带动水向上移动具有冲击力对锅盖进行冲洗,清洗效果好的便于清洗的炒菜机器人。
6.本发明通过以下技术途径实现:
7.一种便于清洗的炒菜机器人,包括有底座、控制组件、转杆、锅体、锅盖、安装架、搅拌架、滑杆和安装板,底座外左侧面固接有控制组件,控制组件上连接有转杆,转杆中部固定套装有锅体,控制组件右侧面上后侧与底座内右侧面上部之间固接有安装架,安装架内顶部固接有锅盖,锅盖与锅体顶部接触,锅盖内侧上部沿周向固接有安装板,安装板底部通过环形槽滑动式的连接有两根滑杆,两根滑杆底端之间固接有用于对菜品进行搅动的搅拌架,还包括有螺旋板、驱动机构和旋转机构,搅拌架上部固接有用于带动水向上移动的螺旋板,安装架与锅盖之间设置有用于带动搅拌架转动的旋转机构,安装架上设置有用于带动旋转机构运作的驱动机构,驱动机构与旋转机构接触。
8.进一步的说明,驱动机构包括有固定架、伺服电机和齿盘,安装架外顶部固接有固定架,固定架上固接有伺服电机,伺服电机的输出轴上通过联轴器连接有用于带动旋转机构运作的齿盘。
9.进一步的说明,旋转机构包括有多孔空心立轴和柱齿轮,安装架顶部中间与锅盖顶部之间转动式的穿接有用于带动搅拌架转动的多孔空心立轴,多孔空心立轴底端转动式的贯穿安装板中部,搅拌架滑动式的贯穿多孔空心立轴下部,多孔空心立轴上部沿周向固
定套装有柱齿轮,柱齿轮与齿盘啮合。
10.进一步的说明,还包括有用于将清洁液喷出的加液机构,加液机构包括有接触架、接触杆、活塞板、挤压缸、喷头、弹簧和转动盘,安装板顶部中间固接有挤压缸,挤压缸与多孔空心立轴内连通,挤压缸滑动式的连接有活塞板,活塞板中部转动式的穿接有转动盘,转动盘滑动式的套装于多孔空心立轴上,活塞板顶部转动式连接有接触杆,挤压缸底部均匀间隔的连通有用于将清洁液喷出的四个喷头,多孔空心立轴上部固定套装有用于带动接触杆向下移动的接触架,接触架底部开有缺口,活塞板底部与挤压缸内底部之间连接有弹簧,弹簧套在多孔空心立轴上。
11.进一步的说明,还包括有用于进一步的对锅盖内壁进行清洗的辅助清洗机构,辅助清洗机构包括有多孔转动架、螺旋输送板、安装杆和清洗滚刷,多孔空心立轴下部沿周向固定套装有多孔转动架,多孔转动架位于安装板下方,多孔转动架外侧沿周向固接有用于带动清洁液向外扩散的螺旋输送板,多孔转动架外侧沿周向均匀间隔的固接有四根安装杆,四根安装杆尾端都贯穿螺旋输送板,四根安装杆上都固定套装有用于对锅盖内壁进行清洗的两个清洗滚刷,全部清洗滚刷都与锅盖内壁接触。
12.进一步的说明,还包括有用于对锅体内壁杂质进行刮除的刮边机构,刮边机构包括有转动环、l型刮杆和磁环,锅体内侧上部沿周向转动式的连接有转动环,转动环内侧面沿周向均匀间隔的固接有用于将锅体内壁上的杂质刮除的四根l型刮杆,四根l型刮杆与锅体内壁接触,转动环内侧上部沿周向固接有磁环,磁环与四根安装杆底端通过磁力相吸。
13.进一步的说明,还包括有用于对清洁液进行放置的辅助供液机构,辅助供液机构包括有储液缸和单向伸缩软管,安装架外顶部固接有储液缸,储液缸底部中间连通有单向伸缩软管,单向伸缩软管尾端与多孔空心立轴顶部中间转动连接并连通。
14.进一步的说明,还包括有盖板,储液缸内侧上部沿周向卡接有盖板。
15.本发明其显著进步在于:
16.1、将适量的菜品与调味品放入锅体内,启动驱动机构带动旋转机构运作,也就使得搅拌架反转对菜进行搅动完成炒菜,菜炒熟后,且菜从锅体内取出时,将水倒入锅体内,启动驱动机构带动旋转机构,使得搅拌架带动螺旋板正转,螺旋板正转带动水向上移动具有冲击力对锅盖内壁进行冲洗,如此,可对锅盖内壁清洗的效果更好,更加干净。
17.2、在加液机构的作用下,每当螺旋板正转带动水向上移动对锅盖内壁进行冲洗时,加液机构运作能够将清洁液排入锅体内与水混合在一起,如此,无需先将清洁液倒入水中进行混合,方便快捷。
18.3、在辅助清洗机构的作用下,能不断的转动对锅盖内壁进行清洗,如此,可将锅盖内壁清洗的更加干净。
附图说明
19.图1为本发明的立体结构示意图。
20.图2为本发明的部分剖视结构示意图。
21.图3为本发明搅拌架的部分剖视结构示意图。
22.图4为本发明安装架的立体结构示意图。
23.图5为本发明驱动机构的部分剖视结构示意图。
24.图6为本发明旋转机构的部分剖视结构示意图。
25.图7为本发明加液机构的部分剖视结构示意图。
26.图8为本发明a部分的放大示意图。
27.图9为本发明辅助清洗机构的部分剖视结构示意图。
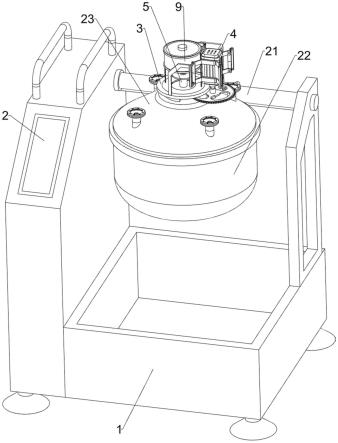
28.图10为本发明多孔转动架的立体结构示意图。
29.图11为本发明刮边机构的部分剖视结构示意图。
30.图12为本发明辅助供液机构的部分剖视结构示意图。
31.图13为本发明接触架的立体结构示意图。
32.图中附图标记的含义:1:底座,2:控制组件,21:转杆,22:锅体,23:锅盖,3:安装架,31:搅拌架,32:滑杆,33:螺旋板,34:安装板,4:驱动机构,41:固定架,42:伺服电机,43:齿盘,5:旋转机构,51:多孔空心立轴,53:柱齿轮,6:加液机构,61:接触架,62:接触杆,63:活塞板,64:挤压缸,65:喷头,66:弹簧,67:转动盘,7:辅助清洗机构,71:多孔转动架,72:螺旋输送板,73:安装杆,74:清洗滚刷,8:刮边机构,81:转动环,82:l型刮杆,83:磁环,9:辅助供液机构,91:储液缸,92:单向伸缩软管,10:盖板。
具体实施方式
33.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。仅此声明,本发明在文中出现或即将出现的上、下、左、右、前、后、内、外等方位用词,仅以本发明的附图为基准,其并不是对本发明的具体限定。
34.实施例1
35.一种便于清洗的炒菜机器人,包括有底座1、控制组件2、转杆21、锅体22、锅盖23、安装架3、搅拌架31、滑杆32、螺旋板33、安装板34、驱动机构4和旋转机构5,请参阅图1-图6所示,底座1外左侧面通过螺栓连接的方式安装有控制组件2,控制组件2由壳体、控制按钮及电机组成,控制组件2上连接有转杆21,控制组件2能够控制转杆21转动,转杆21中部固定套装有锅体22,控制组件2右侧面上后侧与底座1内右侧面上部之间固接有安装架3,安装架3内顶部固接有锅盖23,锅盖23与锅体22顶部接触,锅盖23内侧上部沿周向固接有安装板34,安装板34底部通过环形槽滑动式的连接有两根滑杆32,两根滑杆32底端之间固接有搅拌架31,当搅拌架31转动时,搅拌架31可实现对菜品进行搅动,搅拌架31上部固接有螺旋板33,当螺旋板33正转时,螺旋板33可实现带动水向上移动,安装架3与锅盖23之间设置有旋转机构5,当旋转机构5运作时,旋转机构5可实现带动搅拌架31转动,安装架3上设置有驱动机构4,驱动机构4与旋转机构5接触,当驱动机构4运作时,驱动机构4可实现带动旋转机构5运作。
36.驱动机构4包括有固定架41、伺服电机42和齿盘43,请参阅图1、图2和图5所示,安装架3外顶部通过焊接连接的方式安装有固定架41,固定架41上固接有伺服电机42,伺服电机42的输出轴上通过联轴器连接有齿盘43,当齿盘43转动时,齿盘43可实现带动旋转机构5运作。
37.旋转机构5包括有多孔空心立轴51和柱齿轮53,请参阅图1、图3、图4和图6所示,安装架3顶部中间与锅盖23顶部之间转动式的穿接有多孔空心立轴51,多孔空心立轴51底端转动式的贯穿安装板34中部,搅拌架31滑动式的贯穿多孔空心立轴51下部,当多孔空心立
轴51转动时,多孔空心立轴51可实现带动搅拌架31转动,多孔空心立轴51上部沿周向固定套装有柱齿轮53,柱齿轮53与齿盘43啮合。
38.首先操作控制组件2带动转杆21反转,转杆21反转带动锅体22向下摆动至合适的位置,锅体22向下摆动与锅盖23脱离接触,关闭控制组件2,将菜品和调味品放入锅体22内,再启动控制组件2带动转杆21正转复位,转杆21正转复位带动锅体22向上摆动复位,锅体22复位与锅盖23底部接触,关闭控制组件2,启动驱动机构4,驱动机构4运作带动旋转机构5运作,旋转机构5运作带动搅拌架31反转,搅拌架31反转带动螺旋板33反转,搅拌架31反转则对菜品与调味品进行搅拌,也就完成炒菜,当菜炒好后,关闭驱动机构4,旋转机构5停止带动搅拌架31反转,搅拌架31停止带动螺旋板33反转,再次启动控制组件2通过转杆21带动锅体22向下摆动至合适的位置,再将锅体22内的菜取出进行后续处理,再启动控制组件2通过转杆21带动锅体22向上摆动复位,再通过锅盖23将与清洁液混合后的水倒入锅体22内,启动驱动机构4带动旋转机构5运作,旋转机构5带动搅拌架31正转,搅拌架31正转带动螺旋板33正转,螺旋板33正转带动水向上移动,水向上移动具有一定冲击力,水则对锅盖23内壁进行清洗,同时,搅拌架31正转对水进行搅动,也就完成对锅体22内壁的清洗,当锅体22与锅盖23都清洗干净后,关闭驱动机构4,搅拌架31停止带动螺旋板33正转,按上述操作即可使锅体22向下摆动至合适的位置,再将锅体22内的水取出。
39.当锅体22内放有菜和调味品时,启动伺服电机42正转,伺服电机42正转带动齿盘43正转,齿盘43正转带动旋转机构5运作,也就使得搅拌架31正转对菜品进行搅动,当菜被炒熟后,关闭伺服电机42,齿盘43停止带动旋转机构5运作,搅拌架31停止对菜品进行搅动,再进行后续操作将炒好的菜从锅体22内取出,当锅体22内装有适量的水时,启动伺服电机42反转带动齿盘43反转,齿盘43反转带动旋转机构5运作,旋转机构5运作带动搅拌架31正转,搅拌架31正转带动螺旋板33正转,螺旋板33正转带动水向上移动对锅盖23内壁进行清洗,当锅体22与锅盖23内壁都清洗干净后,关闭伺服电机42,齿盘43停止带动旋转机构5运作,螺旋板33停止正转。
40.当伺服电机42启动正转时,齿盘43正转带动柱齿轮53反转,柱齿轮53反转带动多孔空心立轴51反转,多孔空心立轴51反转带动搅拌架31反转,搅拌架31反转对菜进行搅动,当菜被炒熟后,关闭伺服电机42,齿盘43停止带动柱齿轮53反转,多孔空心立轴51也就停止带动搅拌架31反转,当伺服电机42启动反转时,齿盘43带动柱齿轮53正转,柱齿轮53正转通过多孔空心立轴51带动搅拌架31正转,搅拌架31正转带动螺旋板33正转,螺旋板33正转带动水向上移动对锅盖23内壁进行清洗,当锅体22与锅盖23内壁都清洗干净后,关闭伺服电机42,多孔空心立轴51停止带动搅拌架31正转,螺旋板33也就停止正转。
41.实施例2
42.在实施例1的基础上,还包括有加液机构6,加液机构6包括有接触架61、接触杆62、活塞板63、挤压缸64、喷头65、弹簧66和转动盘67,请参阅图2、图7、图8和图13所示,安装板34顶部中间固接有挤压缸64,挤压缸64与多孔空心立轴51内连通,挤压缸64内滑动式的连接有活塞板63,活塞板63中部转动式的穿接有转动盘67,转动盘67滑动式的套装于多孔空心立轴51上,活塞板63顶部转动式连接有接触杆62,接触杆6与活塞板63之间具有一定的摩擦力,挤压缸64底部均匀间隔的连通有四个喷头65,当清洁液排入喷头65内时,喷头65可实现将清洁液喷出,多孔空心立轴51上部固定套装有接触架61,当接触架61反转时,接触架61
可实现带动接触杆62向下移动,接触架61底部开有缺口,活塞板63底部与挤压缸64内底部之间连接有弹簧66,弹簧66套在多孔空心立轴51上。
43.还包括有辅助清洗机构7,辅助清洗机构7包括有多孔转动架71、螺旋输送板72、安装杆73和清洗滚刷74,请参阅图2、图9和图10所示,多孔空心立轴51下部沿周向固定套装有多孔转动架71,多孔转动架71位于安装板34下方,多孔转动架71外侧沿周向固接有螺旋输送板72,当螺旋输送板72正转时,螺旋输送板72可实现带动清洁液向外扩散,多孔转动架71外侧沿周向均匀间隔的固接有四根安装杆73,四根安装杆73尾端都贯穿螺旋输送板72,四根安装杆73上都固定套装有两个清洗滚刷74,全部清洗滚刷74都与锅盖23内壁接触,当清洗滚刷74转动时,清洗滚刷74可实现对锅盖23内壁进行清洗。
44.首先将适量的清洁液倒入多孔空心立轴51内,多孔空心立轴51内的清洁液排入挤压缸64内,当伺服电机42启动正转时,多孔空心立轴51反转带动接触架61反转,当接触架61反转使得垂直面与接触杆62接触时,接触架61带动接触杆62反转;当伺服电机42启动反转时,多孔空心立轴51正转带动接触架61正转,接触架61正转使得斜面与接触杆62接触,此时由于接触杆62与活塞板63之间的摩擦力,接触架61会先带动接触杆62向下移动,接触架61不会带动接触杆62转动,接触杆62向下移动带动活塞板63向下移动,弹簧66被压缩,活塞板63向下移动带动转动盘67向下移动,活塞板63向下移动将挤压缸64内的清洁液推入四个喷头65内,四个喷头65将清洁液喷出,清洁液与水混合在一起,螺旋板33正转则带动水向上移动对锅盖23内壁进行清洗,当接触架61继续正转使得缺口处与接触杆62接触时,接触架61停止带动接触杆62向下移动,接触架61带动接触杆62正转,当锅盖23与锅体22内壁清洗干净后,关闭伺服电机42,多孔空心立轴51停止带动接触架61正转,接触架61停止带动接触杆62正转,当后续需要炒菜时,启动伺服电机42正转,接触架61也就反转使得缺口与接触杆62脱离接触,因弹簧66的作用,活塞板63向上移动复位带动转动盘67向上移动复位,活塞板63向上移动复位带动接触杆62向上移动复位。如此,无需先将清洁液倒入水中进行混合,方便快捷。
45.当伺服电机42启动反转时,多孔空心立轴51正转还带动多孔转动架71正转,多孔转动架71正转带动螺旋输送板72正转,且多孔转动架71正转还带动四根安装杆73正转,四根安装杆73正转带动全部清洗滚刷74正转,清洗滚刷74正转在锅盖23内壁进行滚动,同时,四个喷头65将清洁液喷出时,清洁液排入多孔转动架71内,多孔转动架71正转将清洁液甩出,甩出的清洁液通过螺旋输送板72扩散至水中,清洗滚刷74正转通过水对锅盖23内壁进行清洗。当伺服电机42关闭时,多孔空心立轴51停止带动多孔转动架71正转,多孔转动架71停止带动螺旋输送板72正转,四根安装杆73还停止带动全部清洗滚刷74正转。如此,可将锅盖23内壁清洗的更加干净。
46.实施例3
47.在实施例1和实施例2的基础上,还包括有刮边机构8,刮边机构8包括有转动环81、l型刮杆82和磁环83,请参阅图2和图11所示,锅体22内侧上部沿周向转动式的连接有转动环81,转动环81内侧面沿周向均匀间隔的固接有四根l型刮杆82,四根l型刮杆82与锅体22内壁接触,当l型刮杆82转动时,l型刮杆82可实现将锅体22内壁上的杂质刮除,转动环81内侧上部沿周向固接有磁环83,磁环83与四根安装杆73底端通过磁力相吸。
48.还包括有辅助供液机构9,辅助供液机构9包括有储液缸91和单向伸缩软管92,请
参阅图1、图2和图12所示,安装架3外顶部通过焊接连接的方式安装有储液缸91,储液缸91底部中间连通有单向伸缩软管92,单向伸缩软管92尾端与多孔空心立轴51顶部中间转动连接并连通。
49.还包括有盖板10,请参阅图12所示,储液缸91内侧上部沿周向卡接有盖板10。
50.当多孔转动架71正转时,四根安装杆73通过磁力带动磁环83正转,磁环83正转带动转动环81正转,转动环81正转带动四个l型刮杆82正转,四个l型刮杆82正转将锅体22内壁上的杂质刮除,当多孔转动架71停止正转时,四根安装杆73停止带动磁环83正转,磁环83停止通过转动环81带动四个l型刮杆82正转,进而锅体22向下摆动时,锅体22通过转动环81带动磁环83向下摆动,磁环83向下摆动与四根安装杆73脱离接触,当锅体22向上摆动复位时,磁环83也就复位与四根安装杆73接触通过磁力相吸。如此,可将锅体22内壁清洗的更加干净。
51.首先将适量的清洁液倒入储液缸91内,储液缸91内的清洁液排入单向伸缩软管92内,单向伸缩软管92内的清洁液排入多孔空心立轴51内,多孔空心立轴51内的清洁液排入挤压缸64内,每当挤压缸64内的清洁液排出一部分时,储液缸91内的清洁液也通过单向伸缩软管92排入多孔空心立轴51内,也就排入挤压缸64内。如此,可不断的添加清洁液,无需人不断的添加,比较方便。
52.当需要将清洁液倒入储液缸91内时,将盖板10从储液缸91上取下,再将适量的清洁液倒入储液缸91内,将盖板10卡回至储液缸91上。如此,可避免外来杂物掉落支储液缸91内与清洁液混在一起。
53.最后,有必要说明的是:上述内容仅用于帮助理解本发明的技术方案,不能理解为对本发明保护范围的限制;本领域技术人员根据本发明的上述内容所做出的非本质改进和调整,均属本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1