一种减重术后患者专用智能管控饮水杯
1.本实用新型涉及医疗器械技术领域,尤其涉及一种减重术后患者专用智能管控饮水杯。
背景技术:
2.减肥手术,又称肥胖症手术,指针对严重肥胖人类,以减肥为目的的一系列医疗治疗手段。目前临床上通常通过减重手术控制胃容量,例如:袖壮胃、胃旁路、胃折叠;术后一段时间内,患者只能进食流质,直到患者的消化道全面恢复。减重术后患者每天的饮水总量、每次的饮水定量、每口的饮水量等也有较严格的要求,具体为每天饮水总量控制在2000ml左右,每次控制在50ml左右,每口要控制在5ml左右。
3.根据上述,目前术后许多患者依从性较差,饮水量未得到良好的控制,许多患者饮水不能满足定量原则;术后1-2天内,每次饮水量过大或每口饮水量过大很容易引发胃部疼痛、恶心呕吐等严重问题。故而鉴于以上缺陷,实有必要设计一种减重术后患者专用智能管控饮水杯。
技术实现要素:
4.本实用新型所要解决的技术问题在于:提供一种减重术后患者专用智能管控饮水杯,来解决背景技术提出的问题。
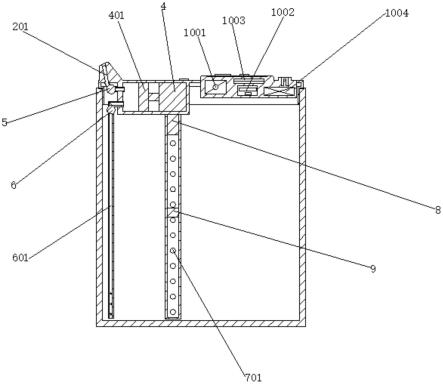
5.为解决上述技术问题,本实用新型的技术方案是:一种减重术后患者专用智能管控饮水杯,包括杯体,还包括杯盖、吸注筒、微型电动推杆、第一单向阀、第二单向阀、检测管、红外测距传感器、反射浮块、控制面板,所述的杯盖安装于杯体顶部,所述的杯盖与杯体采用内外螺纹连接,所述的吸注筒固设于杯盖底部左侧,所述的吸注筒与杯盖一体成型,所述的微型电动推杆固设于吸注筒内部右侧,所述的微型电动推杆与吸注筒采用热熔连接,所述的第一单向阀固设于吸注筒左侧上端,所述的第一单向阀与吸注筒采用热熔连接,所述的第二单向阀固设于吸注筒左侧下端,所述的第二单向阀与吸注筒采用热熔连接,所述的检测管固设于吸注筒底部右侧,所述的检测管与吸注筒采用热熔连接,所述的红外测距传感器固设于检测管内部上端,所述的红外测距传感器与检测管采用热熔连接,所述的反射浮块滑设于检测管内部,所述的反射浮块与检测管采用上下滑动连接,所述的控制面板固设于杯盖内部右侧,所述的控制面板与杯盖采用热熔连接,且所述的控制面板分别与微型电动推杆和红外测距传感器采用电性连接。
6.进一步,所述的杯盖顶部左侧还固设有硅胶嘴,所述的硅胶嘴与杯盖采用热熔连接,且所述的硅胶嘴与第一单向阀采用热熔连接。
7.进一步,所述的微型电动推杆左侧还固设有活塞,所述的活塞与微型电动推杆采用热熔连接,且所述的活塞与吸注筒采用左右滑动连接。
8.进一步,所述的第二单向阀底部还固设有吸水管,所述的吸水管与第二单向阀采用热熔连接。
9.进一步,所述的检测管内部从上至下还设有若干数量的导流孔,所述的导流孔为圆形通孔。
10.进一步,所述的控制面板内部左侧还固设有微处理器模块,所述的微处理器模块与控制面板采用螺栓连接,且所述的微处理器模块分别与微型电动推杆和红外测距传感器采用电性连接,所述的控制面板内部中端下侧还固设有报警器,所述的报警器与控制面板采用螺栓连接,且所述的报警器与微处理器模块采用电性连接,所述的控制面板内部中端上侧还固设有无线传输模块,所述的无线传输模块与控制面板采用螺栓连接,且所述的无线传输模块与微处理器模块采用电性连接,所述的控制面板内部右侧还固设有蓄电池,所述的蓄电池与控制面板采用螺栓连接,且所述的蓄电池分别与微型电动推杆、红外测距传感器、控制面板、微处理器模块、报警器和无线传输模块采用电性连接。
11.与现有技术相比,该一种减重术后患者专用智能管控饮水杯具有以下优点:
12.1、首先当吸注筒内部产生吸力时,利于第二单向阀打开,使得杯体内部的水杯吸入到吸注筒,当吸注筒内部产生挤压时,利于第一单向阀打开,即便于水排出,方便了患者的饮水,借助微型电动推杆的循环往复运动,能每一次定量的实现患者饮水,有效避免患者饮水过多,无法准确控制的问题。
13.2、其次检测管内部的反射浮块能跟随杯体内部的水位高低进行上下浮动,同时红外测距传感器能发出一束红外光,在照射到反射浮块后形成一个反射的过程,通过分析发射和接收时间差的数据,继而能换算出对应的距离,最终便于确定水位高低的增加情况,实现对患者饮水量的推算目的。
附图说明
14.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
15.图1是一种减重术后患者专用智能管控饮水杯的主视图;
16.图2是一种减重术后患者专用智能管控饮水杯的俯视图;
17.图3是一种减重术后患者专用智能管控饮水杯的a向剖视图;
18.图4是一种减重术后患者专用智能管控饮水杯的立体图1;
19.图5是一种减重术后患者专用智能管控饮水杯的立体图2;
20.图6是一种减重术后患者专用智能管控饮水杯的分离状态立体图。
21.杯体1、杯盖2、吸注筒3、微型电动推杆4、第一单向阀5、第二单向阀6、检测管7、红外测距传感器8、反射浮块9、控制面板10、硅胶嘴201、活塞401、吸水管601、导流孔701、微处理器模块1001、报警器1002、无线传输模块1003、蓄电池1004。
22.如下具体实施方式将结合上述附图进一步说明。
具体实施方式
23.在下文中,阐述了多种特定细节,以便提供对构成所描述实施例基础的概念的透彻理解,然而,对本领域的技术人员来说,很显然所描述的实施例可以在没有这些特定细节
中的一些或者全部的情况下来实践,在其他情况下,没有具体描述众所周知的处理步骤。
24.在实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对实用新型的限制。
25.如图1、图2、图3、图4、图5、图6所示,一种减重术后患者专用智能管控饮水杯,包括杯体1、杯盖2、吸注筒3、微型电动推杆4、第一单向阀5、第二单向阀6、检测管7、红外测距传感器8、反射浮块9、控制面板10,所述的杯盖2安装于杯体1顶部,所述的杯盖2与杯体1采用内外螺纹连接,所述的吸注筒3固设于杯盖2底部左侧,所述的吸注筒3与杯盖2一体成型,所述的微型电动推杆4固设于吸注筒3内部右侧,所述的微型电动推杆4与吸注筒3采用热熔连接,所述的第一单向阀5固设于吸注筒3左侧上端,所述的第一单向阀5与吸注筒3采用热熔连接,所述的第二单向阀6固设于吸注筒3左侧下端,所述的第二单向阀6与吸注筒3采用热熔连接,所述的检测管7固设于吸注筒3底部右侧,所述的检测管7与吸注筒3采用热熔连接,所述的红外测距传感器8固设于检测管7内部上端,所述的红外测距传感器8与检测管7采用热熔连接,所述的反射浮块9滑设于检测管7内部,所述的反射浮块9与检测管7采用上下滑动连接,所述的控制面板10固设于杯盖2内部右侧,所述的控制面板10与杯盖2采用热熔连接,且所述的控制面板10分别与微型电动推杆4和红外测距传感器8采用电性连接;
26.需要说明的是该一种减重术后患者专用智能管控饮水杯具备以下功能;
27.a、杯体1和杯盖2采用内外螺纹旋转安装,方便打开进行正常的倒水或清洗,不影响正常的使用操作;
28.b、微型电动推杆4开启后能进行左右伸缩,因第一单向阀5和第二单向阀6的流动方向均为杯体1向杯盖2顶部流出,因此当吸注筒3内部产生吸力时,利于第二单向阀6打开,使得杯体1内部的水杯吸入到吸注筒3,当吸注筒3内部产生挤压时,利于第一单向阀5打开,即便于水排出,方便了患者的饮水,借助微型电动推杆4的循环往复运动,能每一次定量的实现患者饮水,有效避免患者饮水过多,无法准确控制的问题;
29.c、检测管7内部的反射浮块9能跟随杯体1内部的水位高低进行上下浮动,同时红外测距传感器8内置的红外发射器(未标注)能发出一束红外光,在照射到反射浮块9后形成一个反射的过程,即反射到内置的接收二极管(未标注)中,通过分析发射和接收时间差的数据,继而能换算出对应的距离,最终便于确定水位高低的增加情况,实现对患者饮水量的推算目的;
30.所述的杯盖2顶部左侧还固设有硅胶嘴201,所述的硅胶嘴201与杯盖2采用热熔连接,且所述的硅胶嘴201与第一单向阀5采用热熔连接;
31.需要说明的是硅胶嘴201能利于患者咬合,因与第一单向阀5对接,因此方便了患者的饮水;
32.所述的微型电动推杆4左侧还固设有活塞401,所述的活塞401与微型电动推杆4采用热熔连接,且所述的活塞401与吸注筒3采用左右滑动连接;
33.需要说明的是活塞401能在微型电动推杆4的驱动下顺着吸注筒3内壁进行左右滑动,继而通过活塞401的往复滑动来实现吸注筒3将杯体1内部的水由第二单向阀6进入到吸注筒3中,接着由第一单向阀5向硅胶嘴201方向注推而出;
34.所述的第二单向阀6底部还固设有吸水管601,所述的吸水管601与第二单向阀6采用热熔连接;
35.需要说明的是吸水管601能利于将杯体1内部的水向第二单向阀6方向进行导流;
36.所述的检测管7内部从上至下还设有若干数量的导流孔701,所述的导流孔701为圆形通孔;
37.需要说明的是导流孔701能利于杯体1内部的水进出检测管7,便于反射浮块9跟随水位高低进行浮动;
38.所述的控制面板10内部左侧还固设有微处理器模块1001,所述的微处理器模块1001与控制面板10采用螺栓连接,且所述的微处理器模块1001分别与微型电动推杆4和红外测距传感器8采用电性连接,所述的控制面板10内部中端下侧还固设有报警器1002,所述的报警器1002与控制面板10采用螺栓连接,且所述的报警器1002与微处理器模块1001采用电性连接,所述的控制面板10内部中端上侧还固设有无线传输模块1003,所述的无线传输模块1003与控制面板10采用螺栓连接,且所述的无线传输模块1003与微处理器模块1001采用电性连接,所述的控制面板10内部右侧还固设有蓄电池1004,所述的蓄电池1004与控制面板10采用螺栓连接,且所述的蓄电池1004分别与微型电动推杆4、红外测距传感器8、控制面板10、微处理器模块1001、报警器1002和无线传输模块1003采用电性连接;
39.需要说明的是微处理器模块1001不仅能控制微型电动推杆4的伸缩尺寸,此外也能接收红外测距传感器8检测到反射浮块9的位置数据,并分析饮水前的反射浮块9位置数据和饮水后的反射浮块9数据的差额来计算出患者的实际饮水量,同时医护人员亦可预先通过控制面板10对微处理器模块1001的参数进行设置,当患者实际饮水量超过设定标准后,微电脑处理器1001能向报警器1002发送高电平,即达到触发报警器1002,使得报警器1002进行声音报警,以便提醒患者,以免患者超出饮水量,无线传输模块1003能将微处理器模块1001分析计算的数据传输至另一端通信设备中,利于医护人员的掌握监护,蓄电池1004能分别对微型电动推杆4、红外测距传感器8、控制面板10、微处理器模块1001、报警器1002和无线传输模块1003进行电力供应,实现了无外接电源的便捷使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1