擦洗机构及清洁机器人的制作方法
1.本实用新型涉及自动清洁设备技术领域,特别是涉及一种擦洗机构及清洁机器人。
背景技术:
2.随着技术的发展和人们家居生活的需要,各种智能机器人快速地涌向市场,并渗透进用户的生活。清洁机器人就是其中的典型代表,其或单一或组合地具有扫、吸、拖、洗功能。
3.现有技术中带拖地功能的清洁机器人,一个清洁循环内对地面不能进行多次的擦拭清洁,清洁效率低,清洁洁净度不高。
技术实现要素:
4.基于此,有必要针对上述问题,提供一种能够在一个清洁循环内对地面进行多次擦拭清洁的擦洗机构及清洁机器人。
5.一种擦洗机构,所述擦洗机构包括:本体;驱动机构,所述驱动机构设置在所述本体上;偏心结构,所述偏心结构的一端与所述驱动机构连接;拖地盘组件,所述拖地盘组件与所述偏心结构连接,所述本体或所述拖地盘组件的其中一个上设有连接部,所述本体与所述拖地盘组件的另外一个设有限位部,所述连接部能在所述限位部限定的范围内移动。
6.本技术公开的擦洗机构,偏心结构在驱动机构的带动下使拖地盘组件能够有向各个方向移动的趋势,而通过在本体或拖地盘组件的其中一个上设置一个限位部,并通过在另外一个上设置连接部,连接部在限位部限定的范围内移动,从而在驱动机构驱动力的作用下,或驱动机构驱动力的反作用力作用下,驱使拖地盘组件仅能在限位部限定地范围内进行往复地运动。上述驱使拖地盘组件沿特定运动轨迹往复运动的结构设计简单、稳定、可靠性好,方便生产。
7.在其中一个实施例中,所述限位部为限位孔,所述连接部为连接柱,所述连接柱插设于所述限位孔,所述连接柱能在所述限位孔内活动。
8.在其中一个实施例中,所述限位孔为长条孔,所述长条孔的数量为至少两个,至少两个所述长条孔的长度方向沿平行于擦洗机构的运动方向设置,或至少两个所述长条孔的长度方向沿与所述擦洗机构的运动方向相交的方向设置,所述连接柱的两侧能与所述限位孔的孔壁相抵接。
9.在其中一个实施例中,所述拖地盘组件上设有限位槽,所述偏心结构远离所述驱动机构的一端插设于所述限位槽与所述拖地盘组件连接。
10.在其中一个实施例中,所述驱动机构包括电机、第一传动组件以及第二传动组件,所述第一传动组件分别连接所述电机及所述第二传动组件,所述偏心结构与所述第二传动组件远离所述第一传动组件的一端连接,所述第二传动组件能相对所述第一传动组件上下移动。
11.在其中一个实施例中,所述第一传动组件包括输出部以及至少一个传动件,所述传动件与所述电机连接,所述输出部套设在所述第二传动组件外,所述第二传动组件设有第一螺纹部,所述输出部设有与所述第一螺纹部相配合的第二螺纹部。
12.在其中一个实施例中,所述传动件为齿轮件,所述电机与所述齿轮件连接,所述输出部上还设有啮齿,所述齿轮件与所述输出部啮合连接。
13.在其中一个实施例中的擦洗机构还包括盖体组件,所述盖体组件包括第一盖体和第二盖体,所述第一盖体与所述第二盖体围合形成容腔,所述第一传动组件至少部分设置在所述容腔内,所述第一盖体上设置与所述容腔连通的第一开孔,所述电机设置在所述第一盖体上,所述电机的电机轴穿过所述第一开孔与所述第一传动组件连接,所述第二盖体上设有与所述容腔连通的第二开孔,所述第二传动组件通过所述第二开孔与所述第一传动组件连接。
14.在其中一个实施例中,所述第一盖体向远离所述容腔方向上形成有容置槽,所述容置槽与所述容腔连通,所述容置槽内设置所述输出部,所述第二传动组件依次穿过所述第二开孔以及所述容腔进入所述容置槽,所述第二传动组件在所述容置槽内与所述输出部连接。
15.一种清洁机器人,包括机身、清洁件以及如前述任意一项的擦洗机构,所述清洁件设置在所述拖地盘组件远离所述偏心结构的一侧,所述机身上设有安装位,所述擦洗机构设置在所述机身上,所述擦洗机构位于所述安装位处并与所述机身内部的元件电连接。
附图说明
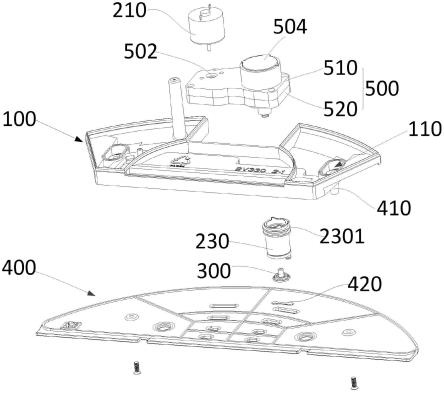
16.图1为本实用新型其中一个实施例所述擦洗机构的分解示意图;
17.图2为本实用新型其中一个实施例所述擦洗机构的剖视图;
18.图3为本实用新型其中一个实施例所述擦洗机构的结构原理图;
19.图4为本实用新型所述拖地盘组件的结构示意图;
20.图5为本实用新型所述本体的结构示意图。
21.其中,附图标记与部件名称之间的对应关系为:
22.100本体,110限位孔;
23.200驱动机构,210电机,220第一传动组件,2201传动件,2202输出部,22021第二螺纹部,230第二传动组件,2301第一螺纹部;
24.300偏心结构;
25.400拖地盘组件,410连接部,420限位槽;
26.500盖体组件,510第一盖体,520第二盖体,501容腔,502第一开孔,503第二开孔。
具体实施方式
27.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
28.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开
的具体实施例的限制。
29.下面参照附图描述本发明一些实施例所述擦洗机构。
30.如图1至图5所示,本实施例公开了一种擦洗机构,包括:本体100;驱动机构200,驱动机构200设置在本体100上;偏心结构300,偏心结构300的一端与驱动机构200连接;拖地盘组件400,拖地盘组件400与偏心结构300连接,本体100或拖地盘组件400的其中一个上设有连接部410,本体100与拖地盘组件400的另外一个设有限位部,连接部410能在限位部限定的范围内移动。
31.本技术公开的擦洗机构,偏心结构300在驱动机构100的带动下使拖地盘组件400能够有向各个方向移动的趋势,而通过在本体100或拖地盘组件400的其中一个上设置一个限位部,并通过在另外一个上设置连接部410,连接部410在限位部限定的范围内移动,从而在驱动机构100驱动力的作用下,或驱动机构100驱动力的反作用力作用下,驱使拖地盘组件400仅能在限位部限定地范围内进行往复地运动,最终实现擦洗机构重复擦拭的动作。上述驱使拖地盘组件沿特定运动轨迹往复运动的结构设计简单、稳定、可靠性好,方便生产。
32.如图1、图5所示,除上述实施例的特征以外,本实施例进一步限定了:限位部为限位孔110,连接部410为连接柱,连接柱插设于限位孔110,连接柱能在限位孔110内活动。
33.上述的擦洗机构进一步限定了:限位部设置为限位孔110.连接部410为连接柱。连接柱插设于限位孔110上,且连接柱在限位孔110限定的空间能能进行往复移动。通过设置限位孔110对偏心结构的运动轨迹进行限定,并最终使连接柱仅能在限定孔110限定的范围内移动,结构简单,机构运行可靠且方便。
34.可选地,如图1、图3所示,连接柱设置在本体100和拖地盘组件400的其中一个上,并且本体100和拖地盘组件400的另外一个上设置于连接柱相适配的连接孔,通过紧固件穿过连接孔与连接柱的紧固装配可以实现本体100与拖地盘组件400之间的连接。
35.如图1、图5所示,进一步地,在本实施例中,限位孔110为长条孔,长条孔的数量为至少两个,至少两个长条孔的长度方向沿平行于擦洗机构的运动方向设置,或至少两个长条孔的长度方向沿与擦洗机构的运动方向相交的方向设置,连接柱的两侧能与限位孔110的孔壁相抵接。
36.上述的擦洗机构进一步限定了:限位孔110为长条孔。长条孔的数量为至少两个。其中,多个长条孔在本体100或拖地盘组件400上的布局可以设置为与擦洗机构的运动方向平行。多个长条孔在本体100或拖地盘组件400上的布局也可以设置为与擦洗机构的运动方向相交的方向设置。上述两种长条孔的布局方式,可以使拖地盘组件400在驱动机构100与偏心结构300的作用下能相对本体100进行前后往复运动或左右往复运动。
37.如图1、图2、图4所示,在本实施例中,拖地盘组件400上设有限位槽420,偏心结构300远离驱动机构200的一端插设于限位槽420与拖地盘组件400连接。通过在拖地盘组件400上设置限位槽420,可以使偏心结构300与拖地盘组件400之间的装配更便捷高效。可选地,限位槽420为长条形的凹槽,从而使偏心结构300能更稳定地插设在限位槽420内,提高擦洗机构的装配稳定性。
38.如图1、图2、图3所示,在本实施例中,驱动机构200包括电机210、第一传动组件220以及第二传动组件230,第一传动组件220分别连接电机210及第二传动组件230,偏心结构300与第二传动组件230远离第一传动组件220的一端连接,第二传动组件230能相对第一传
动组件220上下移动。
39.上述的擦洗机构中电机210上连接有第一传动组件220,第二传动组件230分别连接第一传动组件220以及偏心结构300。第二传动组件230能相对第一传动组件220上下移动,进一步使与第二传动组件230直接连接的偏心结构300以及与第二传动组件230间接连接的拖地盘组件400能相对第一传动组件220上下移动,并最终使拖地盘组件400能相对本体100上下移动。上述的擦洗机构同时具备上下移动的运动轨迹以及偏心旋转运动的运动轨迹以及限位部限定地往复运动的运动轨迹,使用更灵活,且上述的擦洗机构结构简单,零部件少,可靠性好。
40.具体地,当电机210接收到信号时,电机210的电机轴正转并带动第一传动组件220旋转,第二传动组件230随之运动并相对第一传动组件220下降,第二传动组件230运动的同时驱使偏心结构300同步运动,在偏心结构300的带动下拖地盘组件400在限位部限定的范围内进行与清洁机器人移动方向一致或与移动方向相交的往复式运动,从而使擦洗机构实现往复擦拭的清洁动作。当擦拭机构遇到地毯等障碍物时电机210收到信号,电机210的电机轴作反方向运动并带动第一传动组件220反向运动,第二传动组件230及偏心结构300随之运动并相对第一传动组件220上升,最终拖地盘组件400上升离开地面,避免与地毯接触,从而使擦洗机构可以适应不同的使用环境状况,从而提高擦洗机构的使用性能。
41.如图2所示,在本实施例中,第一传动组件220包括输出部2202以及至少一个传动件2201,传动件2201与电机210连接,输出部2202套设在第二传动组件230外,第二传动组件230设有第一螺纹部2301,输出部2202设有与第一螺纹部2301相配合的第二螺纹部22021。
42.上述的擦洗机构进一步限定了:第二传动组件230与第一传动组件220的输出部22021通过螺纹配合的方式实现连接,从而通过螺纹之间的配合将输出部22021水平方向转动方向的力转换为第二传动组件230上下移动的力,且第二传动组件130的另一端通过偏心结构300与拖地盘组件400连接,从而实现拖地盘组件400的上下移动。上述的擦洗机构进一步简化了自动升降的结构设计,使擦洗机构的自动升降结构更加紧凑,且上述通过螺纹配合的方式实现上下移动,无需增加外部机构,实现方式简单,可靠性好,方便维护和批量生产。
43.如图2所示,在本实施例中,传动件2201为齿轮件,电机210与齿轮件连接,输出部2202上还设有啮齿,齿轮件与输出部2202啮合连接。
44.上述的擦洗机构进一步限定了:传动件2201为齿轮件,电机210驱动齿轮件运动,输出部2202的外侧设置有啮齿,齿轮件与输出部2202通过啮齿啮合连接。通过设置齿轮件或齿轮组件作为传动件,可以提高传动的稳定性,从而使输出部2202上的第二传动组件230上下移动更平稳。
45.如图1、图2、图3所示,在本实施例中,自动升降机构还包括盖体组件500,盖体组件500包括第一盖体510和第二盖体520,第一盖体510与第二盖体520围合形成容腔501,第一传动组件120至少部分设置在容腔501内,第一盖体510上设置与容腔501连通的第一开孔502,电机110设置在第一盖体510上,电机210的电机轴穿过第一开孔502与第一传动组件220连接,第二盖体520上设有与容腔501连通的第二开孔503,第二传动组件230通过第二开孔503与第一传动组件220连接。
46.上述的擦洗机构设置第一盖体510和第二盖体520,且第一盖体510与第二盖体520
可拆卸地围合形成容腔501,第一传动组件220设置在容腔501内。通过设置盖体组件500,能够更好地保护第一传动组件220的结构,且电机210通过设置在盖体组件500上,可以更稳定地对第一传动组件220传输转动动能,盖体组件500也能更好地对第一传动组件220进行限位,提高自动升降机构运动轨迹的稳定性以及结构的紧凑性。
47.如图2所示,在本实施例中,第一盖体510向远离容腔501方向上形成有容置槽504,容置槽504与容腔501连通,容置槽504内设置输出部2202,第二传动组件230依次穿过第二开孔503以及容腔501进入容置槽504,第二传动组件230在容置槽504内与输出部2202连接。
48.上述的自动升降机构进一步限定了:在第一盖体501上形成有容置槽504,第一传动组件220的输出部2202设置在容置槽504内,并且输出部2202与容置槽504的槽壁相抵。第二传动组件230能通过第二盖体520上的第二开孔503进入容置槽504内,并在容置槽504内与输出部2202配合且相对输出部2202上下移动。上述的擦洗机构中第二传动组件230与第一传动组件220的配合更加紧凑,结构更稳定。
49.一种清洁机器人,包括机身、清洁件以及如前所述的擦洗机构,清洁件设置在拖地盘组件400远离偏心结构300的一侧,机身上设有安装位,擦洗机构设置在机身上,擦洗机构位于安装位处并与机身内部的元件电连接。
50.本技术第二方面的实施例提供的清洁机器人,包括机身、清洁件以及前述的擦洗机构。清洁件设置在拖地盘组件400远离偏心结构300的一侧,可选地,清洁件为拖布或海绵等,清洁件与拖地盘组件400远离第二传动组件230的一侧可以通过套设、魔术贴粘贴等的其中一种或多种方式实现连接。清洁机器人通过设置前述的擦洗机构,能够在一个清洁循环过程中进行前后或左右往复擦拭的功能,提高清洁效率,提升清洁效果。同时能够降低拖地盘组件400被卡、绊的风险,可以在各种各样的居家环境进行工作,避免清洁机器人在复杂的地面状况下整个拖地件被卡住的风险,使得清洁机器人产品更加智能化。
51.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
52.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1