清洁机器人系统的制作方法
本申请属于清洁设备,具体涉及一种清洁机器人系统。
背景技术:
1、家用智能设备在人们的生活中发挥着越来越重要的作用,由此,越来越多的家用智能设备出现在人们的生活中。其中,清洁机器人是较为常见的一种家用智能设备。清洁机器人通常配套有清洁基站,清洁基站与清洁机器人构成清洁机器人系统,清洁基站用于对清洁机器人的拖布进行清洗,以便清洁机器人进行下一次的清洁作业。
2、清洁基站设有坡面,清洁机器人可沿着坡面移动至清洁基站内部。由于坡面具有一定倾角,并且清洁机器人工作时其拖布湿度较大,因此坡面上常常残留有水分,这些情况都会导致清洁机器人沿坡面移动时打滑,进而出现清洁机器人无法进入清洁基站的问题。
技术实现思路
1、本申请实施例的目的是提供一种清洁机器人系统,能够解决相关技术中清洁机器人沿清洁基站的坡面移动时打滑,导致清洁机器人无法进入清洁基站的问题。
2、本申请实施例提供一种清洁机器人系统,包括清洁基站和清洁机器人,所述清洁基站设有与外界连通的机器人容纳空间,所述清洁基站包括底座,所述底座设有坡面,所述坡面设有第一轮体配合部、第二轮体配合部、第一防滑导向部和第二防滑导向部,所述第一轮体配合部和所述第二轮体配合部均位于第一防滑导向部和所述第二防滑导向部之间,所述清洁机器人包括机器人主体以及设置于所述机器人主体的第一驱动轮和第二驱动轮,
3、在所述清洁机器人通过所述坡面进入所述机器人容纳空间的过程中,所述第一驱动轮与所述第一轮体配合部接触,所述第二驱动轮与所述第二轮体配合部接触,且所述机器人主体分别与所述第一防滑导向部和所述第二防滑导向部导向配合。
4、在本申请实施例中,清洁机器人沿坡面进入机器人容纳空间的过程中,机器人主体被限位于第一防滑导向部和第二防滑导向部之间,第一防滑导向部和第二防滑导向部共同对机器人主体的移动方向施加导向,故能够防止清洁机器人的移动方向出现偏差,进而有效避免清洁机器人沿坡面移动时因打滑而改变移动方向;而且,由于第一驱动轮与第一轮体配合部接触,且第二驱动轮与第二轮体配合部接触,故第一驱动轮与坡面之间的摩擦力增大,第二驱动轮与坡面之间的摩擦力也增大,有效避免清洁机器人打滑时沿前进方向的相反方向移动。
5、如此设置,通过第一防滑导向部和第二防滑导向部对机器人主体施加导向,结合第一轮体配合部和第二轮体配合部限制清洁机器人反向移动,有效避免清洁机器人沿清洁基站的坡面移动时打滑,保证清洁机器人顺利进入清洁基站的机器人容纳空间。
技术特征:
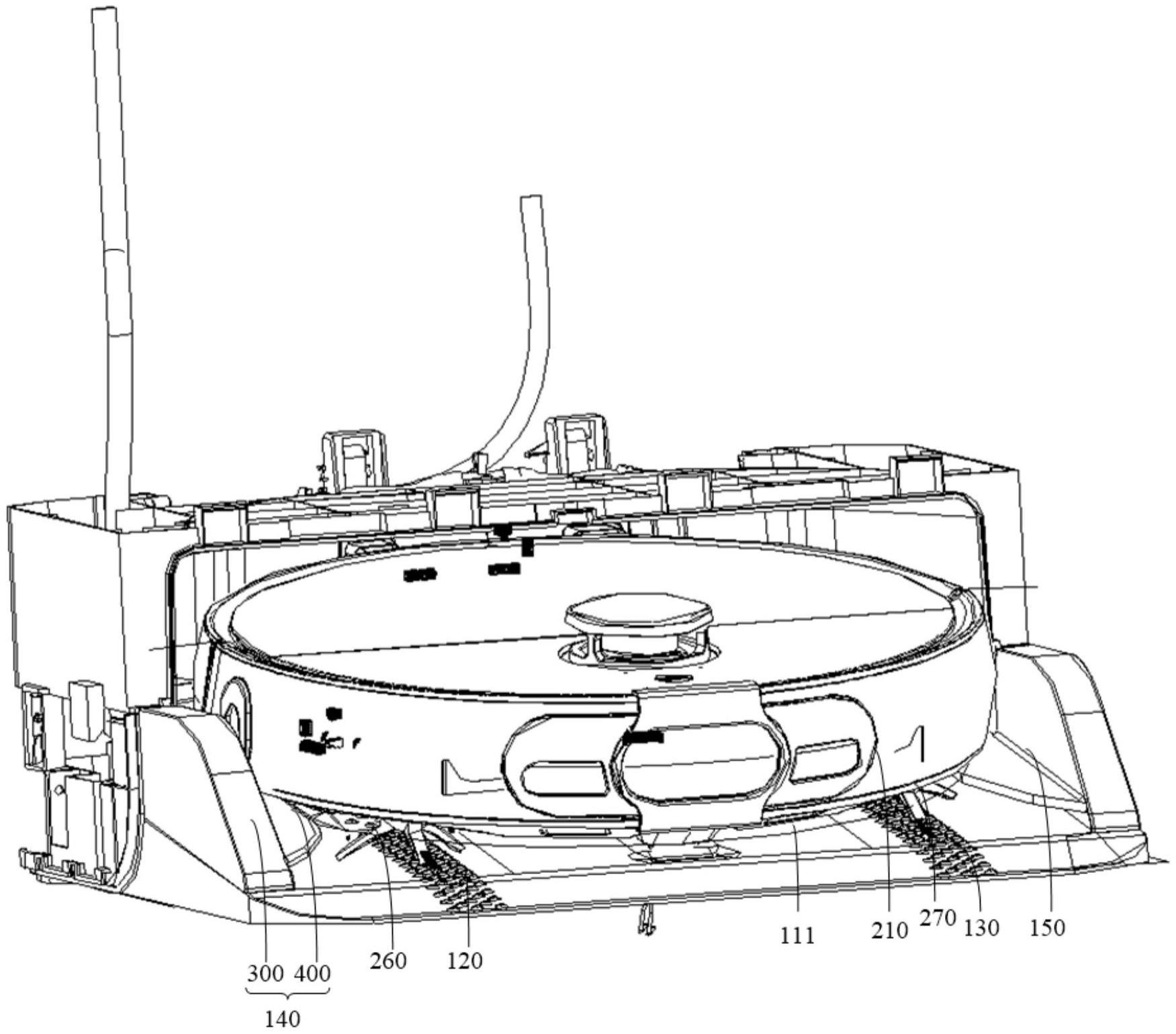
1.一种清洁机器人系统,其特征在于,包括清洁基站(100)和清洁机器人(200),所述清洁基站(100)设有与外界连通的机器人容纳空间,所述清洁基站(100)包括底座(110),所述底座(110)设有坡面(111),所述坡面(111)设有第一轮体配合部(120)、第二轮体配合部(130)、第一防滑导向部(140)和第二防滑导向部(150),所述第一轮体配合部(120)和所述第二轮体配合部(130)均位于第一防滑导向部(140)和所述第二防滑导向部(150)之间,所述清洁机器人(200)包括机器人主体(210)以及设置于所述机器人主体(210)的第一驱动轮(220)和第二驱动轮(230),
2.根据权利要求1所述的清洁机器人系统,其特征在于,所述机器人主体(210)的底部设有第一导向筋(240)和第二导向筋(250),在所述清洁机器人(200)通过所述坡面(111)进入所述机器人容纳空间的过程中,所述第一导向筋(240)与所述第一防滑导向部(140)接触进行导向配合,所述第二导向筋(250)与所述第二防滑导向部(150)接触进行导向配合。
3.根据权利要求2所述的清洁机器人系统,其特征在于,所述第一防滑导向部(140)的侧部和所述第二防滑导向部(150)的侧部均设有导向面(410),所述导向面(410)包括导向弧面(a)和导向平面(b),所述导向弧面(a)和所述导向平面(b)相连,且两者沿所述清洁机器人(200)进入所述机器人容纳空间时的移动方向依次排布,所述导向弧面(a)向所述第一轮体配合部(120)和所述第二轮体配合部(130)所在一侧凸出,
4.根据权利要求3所述的清洁机器人系统,其特征在于,所述第一导向筋(240)和所述第二导向筋(250)均包括弧形导向筋(c)和平面导向筋(d),所述平面导向筋(d)与所述弧形导向筋(c)相连,且二者沿所述清洁机器人(200)进入所述机器人容纳空间时的移动方向依次排布,所述弧形导向筋(c)沿背离所述第一驱动轮(220)和所述第二驱动轮(230)的方向凸出,
5.根据权利要求1所述的清洁机器人系统,其特征在于,所述第一防滑导向部(140)和所述第二防滑导向部(150)均包括安装板(300)和导向板(400),所述安装板(300)沿所述清洁基站(100)的高度方向延伸,且所述安装板(300)与所述底座(110)固定连接,所述导向板(400)与所述安装板(300)相连,且所述导向板(400)所在面与所述安装板(300)所在面相交。
6.根据权利要求5所述的清洁机器人系统,其特征在于,所述导向板(400)与所述坡面(111)相平行。
7.根据权利要求1所述的清洁机器人系统,其特征在于,所述清洁机器人(200)还包括设于所述机器人主体(210)的第一清洁刷(260)和第二清洁刷(270),所述第一防滑导向部(140)与所述坡面(111)之间具有第一避让间隙,所述第二防滑导向部(150)与所述坡面(111)之间具有第二避让间隙,
8.根据权利要求1所述的清洁机器人系统,其特征在于,所述第一轮体配合部(120)的长度等于所述第二轮体配合部(130)的长度,所述第一防滑导向部(140)的长度与所述第一轮体配合部(120)的长度之间的比值为0.5~1,所述第二防滑导向部(150)的长度与所述第二轮体配合部(130)的长度之间的比值为0.5~1。
9.根据权利要求1所述的清洁机器人系统,其特征在于,所述底座(110)还设有驱动轮限位槽(160),在所述清洁机器人(200)移动至充电位置的情况下,所述第一驱动轮(220)和所述第二驱动轮(230)中的至少一者与所述驱动轮限位槽(160)限位配合。
10.根据权利要求9所述的清洁机器人系统,其特征在于,所述底座(110)还设有支撑块(170),所述驱动轮限位槽(160)位于所述支撑块(170)和所述坡面(111)之间,在所述清洁机器人(200)移动至所述充电位置的情况下,所述机器人主体(210)的边缘支撑于所述支撑块(170)。
技术总结
本申请公开一种清洁机器人系统,涉及清洁设备技术领域,清洁机器人系统包括清洁基站和清洁机器人,清洁基站设有与外界连通的机器人容纳空间,清洁基站包括底座,底座设有坡面,坡面设有第一轮体配合部、第二轮体配合部、第一防滑导向部和第二防滑导向部,第一轮体配合部和第二轮体配合部均位于第一防滑导向部和第二防滑导向部之间,清洁机器人包括机器人主体以及设置于机器人主体的第一驱动轮和第二驱动轮,在清洁机器人通过坡面进入机器人容纳空间的过程中,第一驱动轮与第一轮体配合部接触,第二驱动轮与第二轮体配合部接触,且机器人主体分别与第一防滑导向部和第二防滑导向部导向配合。
技术研发人员:吴大涛,金静阳,孟向伟,张乐乐
受保护的技术使用者:杭州萤石软件有限公司
技术研发日:20220513
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!