清洁组件自动更换装置以及智能清洁系统的制作方法
1.本实用新型属于清洁设备技术领域,具体涉及一种清洁组件自动更换装置,还涉及包含以上清洁组件自动更换装置的智能清洁系统。
背景技术:
2.中扫清洁组件为单一吸口式的清洁机器人,其清洁垃圾的方式为风机的抽吸,适用于附着力不强的轻质垃圾,如毛发、粉尘等,对于水果皮、饭粒等粘附于作业面的垃圾则清洁能力较差。中扫清洁组件为滚刷或滚筒式的清洁机器人,其清洁垃圾的方式除了风机的抽吸外,还有滚刷对清洁面的扫刷,但是在毛发、丝线等线性垃圾较多的作业场景中执行作业时,滚刷常常被线性垃圾缠绕、捆绑。于是,研发人员便设计出了可以相互替换的吸口式清洁组件和滚刷式清洁组件。当只需要清扫轻质垃圾、附着力不强的垃圾或线性垃圾时,采用吸口式中扫清洁组件;当需要清扫重质垃圾、粘附垃圾且线性垃圾较少时,采用滚刷式中扫清洁组件;当作业环境既有轻质垃圾、重质垃圾,还有较多线性垃圾时,可以先安装吸口式中扫清洁组件清扫一遍,再更换为滚刷式中扫清洁组件清扫一遍即可完成多种类型垃圾的清理。
3.但是,目前对于中扫清洁组件的选择更换,需要通过人工手动进行,其过程较为繁琐,自动化程度较低。
技术实现要素:
4.鉴于现有技术存在的不足,本实用新型提供了一种清洁组件自动更换装置,以解决现有的清洁机器人中需要通过人工手动更换清洁组件的问题。
5.为了达到以上目的,本实用新型采用了如下的技术方案:
6.一种清洁组件自动更换装置,所述装置包括:
7.运送轨道,设置有组件存储区和组件更换口,所述组件存储区中存储有待更换的第二清洁组件,所述组件更换口配置为用于接收被更换的第一清洁组件以及送出所述第二清洁组件;
8.第一驱动机构,配置为用于将所述第一清洁组件沿着所述运送轨道从所述组件更换口运送至所述组件存储区;
9.第二驱动机构,配置为用于将所述第二清洁组件沿着所述运送轨道从所述组件存储区运送至所述组件更换口。
10.优选的方案中,所述运送轨道包括第一横向子轨道、第二横向子轨道、第一纵向子轨道和第二纵向子轨道,所述第一纵向子轨道连接在所述第一横向子轨道的第一端和所述第二横向子轨道的第一端之间,所述第二纵向子轨道连接在所述第一横向子轨道的第二端和所述第二横向子轨道的第二端之间;
11.其中,所述组件更换口设置于所述第一横向子轨道的第一端,所述组件存储区设置于所述第一横向子轨道的第二端;
12.其中,所述第一驱动机构驱动所述第一清洁组件沿着所述第一纵向子轨道、第二横向子轨道和第二纵向子轨道从所述组件更换口运送至所述组件存储区;所述第二驱动机构驱动所述第二清洁组件沿着所述第一横向子轨道从所述组件存储区运送至所述组件更换口。
13.优选的方案中,所述第一横向子轨道设置于所述第二横向子轨道的相对上方,所述第一纵向子轨道和所述第二纵向子轨道大致呈竖直方向设置,所述组件更换口接收到的第一清洁组件基于自身的重力沿着所述第一纵向子轨道从所述组件更换口移动至所述第二横向子轨道的第一端;
14.其中,所述第一驱动机构包括第一横向驱动件和第一纵向驱动件;所述第一横向驱动件设置在临近于所述第二横向子轨道的第一端,配置为用于将所述第一清洁组件从所述第二横向子轨道的第一端运送至所述第二横向子轨道的第二端;所述第一纵向驱动件设置在临近于所述第二横向子轨道的第二端,配置为用于将所述第一清洁组件从所述第二横向子轨道的第二端沿着所述第二纵向子轨道运送至所述第一横向子轨道的第二端;
15.其中,所述第二驱动机构包括第二横向驱动件和第二纵向驱动件;所述第二横向驱动件设置在临近于所述第一横向子轨道的第二端,配置为用于将所述第二清洁组件从所述第一横向子轨道的第二端运送至所述第一横向子轨道的第一端;所述第二纵向驱动件设置在临近于所述第二横向子轨道的第一端,配置为用于将运送到达所述第一横向子轨道的第一端的第二清洁组件支撑在所述组件更换口中。
16.优选的方案中,所述第一清洁组件和所述第二清洁组件上分别设置有磁性件,所述第一横向驱动件和所述第二横向驱动件分别为电磁铁,所述电磁铁配置为在通电状态下能够产生与所述磁性件相互排斥的磁力。
17.优选的方案中,所述第一纵向驱动件和所述第二纵向驱动件分别为可伸缩的升降组件。
18.优选的方案中,所述第一清洁组件和所述第二清洁组件的其中一个为滚刷组件,另一个为吸尘口组件。
19.优选的方案中,所述装置包括两个所述运送轨道,两个所述运送轨道相互间隔且并行排列;所述第一清洁组件和所述第二清洁组件分别设置有横向枢轴,所述横向枢轴的一端搭接在一个所述运送轨道上,另一端搭接在另一个所述运送轨道上。
20.本发明的另一方面是提供一种智能清洁系统,其包括清洁机器人和如上所述的清洁组件自动更换装置,所述清洁组件自动更换装置用于对装配在所述清洁机器人中的清洁组件进行更换。
21.优选的方案中,所述清洁机器人包括组件装配口和吸附组件,所述清洁组件由所述吸附组件提供的吸附力吸附连接在所述组件装配口中。
22.优选的方案中,所述清洁组件上设置有磁性件,所述吸附组件为电磁铁,所述电磁铁配置为在通电状态下能够产生与所述磁性件相互吸引的磁力。
23.本实用新型实施例提供的清洁组件自动更换装置,通过设置运送轨道、第一驱动机构和第二驱动机构,可以实现对清洁机器人的清洁组件进行自动更换,代替了现有的采用人工手动更换的方式,提升了组件更换的自动化程度,提供了工作效率。
附图说明
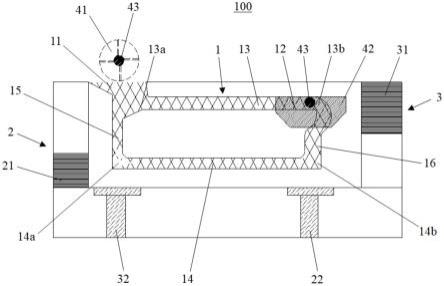
24.图1是本实用新型中的清洁组件自动更换装置的结构示意图;
25.图2是本实用新型中的清洁组件自动更换装置的俯视结构图示;
26.图3是本实用新型中的智能清洁系统的结构示意图;
27.图4是本实用新型中的清洁机器人的结构示意图;
28.图5是本实用新型中的清洁机器人安装了第一清洁组件的整体结构示意图。
具体实施方式
29.为使本实用新型的目的、技术方案和优点更加清楚,下面结合附图对本实用新型的具体实施方式进行详细说明。这些优选实施方式的示例在附图中进行了例示。附图中所示和根据附图描述的本实用新型的实施方式仅仅是示例性的,并且本实用新型并不限于这些实施方式。
30.在此,还需要说明的是,为了避免因不必要的细节而模糊了本实用新型,在附图中仅仅示出了与根据本实用新型的方案密切相关的结构和/或处理步骤,而省略了与本实用新型关系不大的其他细节。
31.本实用新型实施例首先提供了一种清洁组件自动更换装置,用于对装配在清洁机器人中的清洁组件进行更换。参阅图1,清洁组件自动更换装置100包括运送轨道1、第一驱动机构2和第二驱动机构3。
32.其中,如图1所示,运送轨道1大体上为环形。环形的运送轨道1设置有组件存储区12和组件更换口11。组件存储区12中存储有待更换的第二清洁组件42,组件更换口11配置为用于接收被更换的第一清洁组件41以及送出第二清洁组件42。
33.具体地,被更换的第一清洁组件41,即原本装配在清洁机器人中而需要卸下的清洁组件;待更换的第二清洁组件42则是需要重新装配到清洁机器人中的清洁组件;在不需要做具体区分的情况下,在下文中将第一清洁组件41和第二清洁组件42统称为清洁组件。
34.其中,第一清洁组件41和第二清洁组件42的其中一个为滚刷组件,另一个为吸尘口组件,容易理解的是,第一清洁组件41和第二清洁组件42也可以是其他类型的清洁组件,例如滚筒组件。本实施例中,如图1中,以第一清洁组件41为滚刷组件,而第二清洁组件42为吸尘口组件为例,进行具体说明。
35.其中,第一驱动机构2配置为用于将从清洁机器人卸下第一清洁组件41,并沿着运送轨道1从组件更换口11运送至组件存储区12。第二驱动机构3配置为用于将第二清洁组件42沿着运送轨道1从组件存储区12运送至组件更换口11。
36.作为优选的方案,本实施例中,如图1所示,运送轨道1包括第一横向子轨道13、第二横向子轨道14、第一纵向子轨道15和第二纵向子轨道16。其中,第一纵向子轨道15连接在第一横向子轨道13的第一端13a和第二横向子轨道14的第一端14a之间,第二纵向子轨道16连接在第一横向子轨道13的第二端13b和第二横向子轨道14的第二端14b之间。其中,组件更换口11设置于第一横向子轨道13的第一端13a,组件存储区12设置于第一横向子轨道13的第二端13b。
37.其中,第一清洁组件41在运送轨道1中的移动路径是:第一驱动机构2驱动第一清洁组件41沿着第一纵向子轨道15、第二横向子轨道14和第二纵向子轨道16从组件更换口11
移动运送至组件存储区12。
38.其中,第二清洁组件42在运送轨道1中的移动路径是:第二驱动机构3驱动第二清洁组件42沿着第一横向子轨道13从组件存储区12移动运送至组件更换口11。
39.作为优选的方案,本实施例中,第一横向子轨道13设置于第二横向子轨道14的相对上方,第一纵向子轨道15和第二纵向子轨道16大致呈竖直方向设置。组件更换口11接收到的第一清洁组件41,基于自身的重力沿着第一纵向子轨道15从组件更换口11移动至第二横向子轨道14的第一端14a。
40.其中,如图1所示,第一驱动机构2包括第一横向驱动件21和第一纵向驱动件22。第一横向驱动件21设置在临近于第二横向子轨道14的第一端14a,第一横向驱动件21配置为能够将第一清洁组件41从第二横向子轨道14的第一端14a运送至第二横向子轨道14的第二端14b。第一纵向驱动件22设置在临近于第二横向子轨道14的第二端14b,第一纵向驱动件22配置为能够将第一清洁组件41从第二横向子轨道14的第二端14b沿着第二纵向子轨道16运送至第一横向子轨道13的第二端13b,即运送至组件存储区12。
41.其中,如图1所示,第二驱动机构3包括第二横向驱动件31和第二纵向驱动件32。第二横向驱动件31设置在临近于第一横向子轨道13的第二端13b,第二横向驱动件31配置为能够将第二清洁组件42从第一横向子轨道13的第二端13b运送至第一横向子轨道13的第一端13a,即运送至组件更换口11。第二纵向驱动件32设置在临近于第二横向子轨道14的第一端14b,配置为能够将运送到达第一横向子轨道13的第一端13a的第二清洁组件42稳定支撑在组件更换口11中,以使得第二清洁组件42能够顺利地装配到清洁机器人上。
42.作为优选的方案,本实施例中,第一清洁组件41和第二清洁组件42上分别设置有磁性件43。第一横向驱动件21和第二横向驱动件31分别为电磁铁,该电磁铁配置为在通电状态下能够产生与磁性件43相互排斥的磁力,从而使得第一横向驱动件21能够将第一清洁组件41从第二横向子轨道14的第一端14a驱动运送至第二横向子轨道14的第二端14b,第二横向驱动件31能够将第二清洁组件42从第一横向子轨道13的第二端13b驱动运送至第一横向子轨道13的第一端13a。需要说明的是,在另外的一些实施例中,第一横向驱动件21和第二横向驱动件31也可以选择使用其他的驱动件,例如皮带运送机构。
43.作为优选的方案,本实施例中,第一纵向驱动件22和第二纵向驱动件32则分别为可伸缩的升降组件。需要说明的是,在另外的一些实施例中,第一纵向驱动件22和第二纵向驱动件32也可以选择使用其他的驱动件,例如皮带运送机构。
44.作为优选的方案,本实施例中,参阅图2,清洁组件自动更换装置100包括两个运送轨道1,两个运送轨道1相互间隔且并行排列。第一清洁组件41和第二清洁组件42分别设置有横向枢轴44,横向枢轴44的一端搭接在一个运送轨道1上,另一端搭接在另一个运送轨道1上。通过设置并行排列的两个运送轨道1,可以使得第一清洁组件41和第二清洁组件42在运送轨道1中的移动更加平稳。其中,如图2所示,第一横向驱动件21和第二纵向驱动件32位于两个运送轨道1之间且临近于运送轨道1的其中一端,第二横向驱动件31和第一纵向驱动件22位于两个运送轨道1之间且临近于运送轨道1的另一端。
45.基于如上实施例提供的清洁组件自动更换装置100,本实用新型实施例还提供了一种智能清洁系统。参阅图3,本实施例中的智能清洁系统包括清洁机器人200和清洁组件自动更换装置100,清洁组件自动更换装置100用于对装配在清洁机器人100中的清洁组件
进行更换,即,将原本装配在清洁机器人200中的第一清洁组件41卸下并存储在清洁组件自动更换装置100中,然后将原本存储在清洁组件自动更换装置100中的第二清洁组件42重新装配到清洁机器人200。
46.本实施例中的智能清洁系统还包括工作基站300,清洁组件自动更换装置100安装在工作基站300中。工作基站300中还可以设置有用于对清洁机器人200进行充电的电源装置。
47.参阅图4,本实施例中的清洁机器人200包括机体201和能够驱动机体201移动的驱动轮202。其中,机体201的底部设置有组件装配口203,机体201的内部位于组件装配口203上方设置有吸附组件204,机体201的内部(即组件装配口203的任意一侧)还设置有滚刷驱动装置(图未示),用于驱动作为滚刷组件的第一清洁组件41或第二清洁组件42。
48.结合图4和图5,清洁机器人200的组件装配口203上能可拆卸地安装第一清洁组件41和第二清洁组件42,第一清洁组件41和第二清洁组件42能在组件装配口203上互相替换。其中,第一清洁组件41或第二清洁组件42是由吸附组件204提供的吸附力吸附连接在组件装配口203中。
49.本实施例中,如前文所述,第一清洁组件41和第二清洁组件42上分别设置有磁性件43。因此,作为优选的方案,本实施例中,吸附组件204为电磁铁,该电磁铁配置为在通电状态下能够产生与磁性件43相互吸引的磁力,由此通过控制该电磁铁的通电和断电状态,提供吸附力或解除吸附力,进而实现装配或卸下相应的清洁组件。
50.进一步地,本实施例中,如图4所示,组件装配口203上还设置有导正限位板205。通过设置导正限位板205,可以使得清洁组件可以准确地安装到组件装配口203中。
51.结合图1至图5,以上实施例提供的清洁组件自动更换装置100以及相应的智能清洁系统,对装配在清洁机器人200中的清洁组件进行更换的过程包括:
52.(1)清洁机器人200移动至清洁组件自动更换装置100的上方,并使得组件装配口203正对组件更换口11;
53.(2)控制清洁机器人200中的吸附组件204解除吸附力,使得被更换的第一清洁组件41落入到组件更换口11,并基于自身的重力沿着第一纵向子轨道15从组件更换口11移动至第二横向子轨道14的第一端14a;
54.(3)启动第一横向驱动件21,将第一清洁组件41从第二横向子轨道14的第一端14a运送至第二横向子轨道14的第二端14b;
55.(4)启动第二纵向驱动件32上升至与第一横向子轨道13的第一端13a平齐,启动第二横向驱动件31将第二清洁组件42从第一横向子轨道13的第二端13b运送至第一横向子轨道13的第一端13a,即运送至组件更换口11,并且由第二纵向驱动件32稳定支撑在组件更换口11中;
56.(5)控制清洁机器人200中的吸附组件204产生吸附力,将第二清洁组件42从组件更换口11吸附连接至组件装配口203中;
57.(6)启动第一纵向驱动件22,将第一清洁组件41从第二横向子轨道14的第二端14b沿着第二纵向子轨道16运送至第一横向子轨道13的第二端13b,即运送至组件存储区12,由此完成清洁机器人200的清洁组件的自动更换。
58.综上所述,本实用新型实施例提供的清洁组件自动更换装置以及相应的智能清洁
系统,可以实现对清洁机器人的清洁组件进行自动更换,代替了现有的采用人工手动更换的方式,提升了组件更换的自动化程度,提高了工作效率。
59.虽然已经参照特定实施例示出并描述了本实用新型,但是本领域的技术人员将理解:在不脱离由权利要求及其等同物限定的本实用新型的精神和范围的情况下,可在此进行形式和细节上的各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1