传动机构和扫地机器人的制作方法
1.本实用新型涉及清洁装置领域,尤其涉及一种传动机构和扫地机器人。
背景技术:
2.随着生活水平的不断提高和科学技术的发展,人们开始追求更加便利的智能化生活。针对这种需求,市面上涌现出了为数不少的与日常生活相关的智能化机器人,其中应用最广泛、市场竞争较为激烈的就是扫地机器人。
3.扫地机器人主要包括滚筒和毛刷,其中,毛刷用于清洁滚筒表面的灰尘和毛发,以保证滚筒的清洁效果。此外,现有的扫地机器人还会在滚筒和毛刷的端部增加传动组件,使毛刷可以跟随滚筒一起转动,以提高清洁效果。
4.为了保证地面清洁的效率,一般扫地机器人中滚筒的横向长度设置比较大,而在滚筒的端部增加传动组件,会导致扫地机器人的横向长度增加,继而使扫地机器人体积变大,变得臃肿,影响扫地机器人的正常使用,而缩小滚筒的长度又会影响滚筒的清洁效率。
技术实现要素:
5.本实用新型的目的在于克服现有技术的不足,提供了一种传动机构和扫地机器人,解决现有扫地机器人进行滚筒和毛刷的传动导致的扫地机器人横向长度变大的问题。
6.为达到上述目的,本实用新型采用了以下技术方案:
7.第一方面,提供一种传动机构,用于传动滚筒和毛刷,所述传动机构包括:驱动滚轴、第一安装座和传动组件;
8.所述毛刷的一端和所述驱动滚轴的一端均与所述第一安装座转动连接;
9.所述驱动滚轴与所述滚筒相接触;
10.当所述滚筒转动时,所述驱动滚轴跟随所述滚筒转动,所述驱动滚轴通过所述传动组件驱动所述毛刷转动,所述毛刷的转动方向与所述滚筒的转动方向相同。
11.在第一方面的第一种可能的实现方式中,所述传动机构包括:至少一个胶套;
12.至少一个所述胶套套设在所述驱动滚轴的外表面,并与所述滚筒相接触,所述胶套用于通过所述滚筒驱动所述驱动滚轴转动。
13.基于第一方面的第一种可能的实现方式,在第一方面的第二种可能的实现方式中,所述驱动滚轴上设置有至少一个定位槽,每个所述定位槽与每个所述胶套一一对应,每个所述胶套分别套设在对应的所述定位槽上。
14.其中,所述定位槽能够降低胶套的安装难度;尤其当所述胶套的长度为2cm时,所述胶套的安装拆卸最为便捷。
15.基于第一方面的第一种可能的实现方式,在第一方面的第三种可能的实现方式中,所述传动机构包括:两个胶套,所述两个胶套分别套设在所述驱动滚轴的两端。
16.在第一方面的第四种可能的实现方式中,所述传动组件包括:第一齿轮和第二齿轮;
17.所述第一齿轮与所述毛刷的至少一端周向固定连接,所述第二齿轮与所述驱动滚轴的至少一端周向固定连接,所述第一齿轮与所述第二齿轮相互啮合;
18.所述驱动滚轴通过所述第一齿轮和所述第二齿轮驱动所述毛刷转动。
19.基于第一方面的第四种可能的实现方式,在第一方面的第五种可能的实现方式中,所述第一齿轮上设置有第一孔,所述第二齿轮设置有第二孔;
20.所述毛刷通过所述第一孔与所述第一齿轮周向固定连接,所述驱动滚轴通过所述第二孔与所述第二齿轮周向固定连接。
21.所述第一孔和所述第二孔的设置,能够有效地防止工作状态下的所述驱动滚轴和所述第二齿轮以及所述毛刷和所述第一齿轮相互之间发生打滑。
22.基于第一方面的上述任意一种可能,在第一方面的第六种可能的实现方式中,所述传动机构还包括:第二安装座;
23.所述毛刷远离所述第一安装座的一端和所述驱动滚轴远离所述第一安装座的一端均与所述第二安装座转动连接。
24.所述驱动滚轴两端分别与所述第一安装座和所述第二安装座转动连接,可以保证其在工作状态下的稳定性,防止所述驱动滚轴工作时因转动不稳定产生故障。
25.基于第一方面的上述任意一种可能,在第一方面的第六种可能的实现方式中,所述胶套为柔性材料。
26.基于第一方面的上述任意一种可能,在第一方面的第七种可能的实现方式中,所述胶套的表面设置有防滑纹。
27.基于第一方面的上述任意一种可能,在第一方面的第八种可能的实现方式中,所述驱动滚轴的硬度大于所述胶套的硬度。
28.所述胶套上设置的防滑纹增大了与滚筒3之间的摩擦力,在一定程度上提高了传动机构的传动效率;所述胶套的材料和硬度可以使其在工作时不易产生位移,便于安装拆卸。
29.基于第一方面的上述任意一种可能,在第一方面的第九种可能的实现方式中,所述的传动机构还包括第一轴承和第二轴承;所述驱动滚轴通过所述第一轴承转动设置在所述第一安装座上,所述驱动滚轴通过所述第二轴承转动设置在第二安装座上。
30.所述第一轴承和所述第二轴承可以减少驱动滚轴工作时的能量损耗,提高整个传动机构的工作效率。
31.第二方面,提供一种扫地机器人,所述扫地机器人包括:垃圾盒和基于第一方面的上述任意一种可能的实现方式中的传动机构;
32.所述垃圾盒用于收纳通过所述毛刷对所述滚筒进行清理后的灰尘。
33.本实用新型的有益效果在于,与现有技术相比,本实用新型通过将驱动滚轴贴合设置在滚筒一侧,在摩擦力的作用下可实现滚筒带动驱动滚轴转动,再通过在驱动滚轴和毛刷之间设置传动组件,即可实现驱动滚轴与毛刷的传动连接,继而带动毛刷转动,即本实用新型在不增加扫地机器人横向长度以及保证滚筒清洁地面效率的前提下,通过驱动滚轴和传动组件的配合实现了滚筒和毛刷之间的传动,具有结构简单、生产成本低等特点。
附图说明
34.图1a是本技术实施例提供的一种传动机构所涉及的清扫场景的场景示意图;
35.图1b是本实用新型提供的一种扫地机器人的结构示意图;
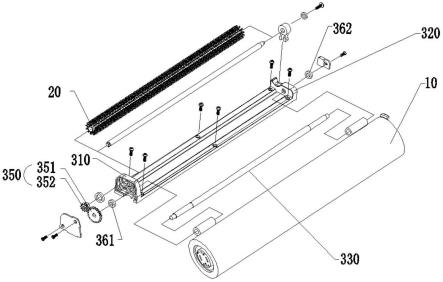
36.图2是本实用新型提供的一种传动机构的结构示意图;
37.图3是本实用新型提供的一种第一安装座的结构示意图;
38.图4是本实用新型提供的一种驱动滚轴的局部放大示意图;
39.图5是本实用新型提供的一种胶套的结构示意图;
40.图6是本实用新型提供的一种传动组件的局部放大示意图;
41.图7是本实用新型提供的另一种传动组件的局部放大示意图;
42.图8是本实用新型提供的一种第二安装座的结构示意图;
43.附图中的标号如下:
44.10-滚筒,20-毛刷,30-传动机构,40-垃圾盒,310-第一安装座,320-第二安装座,330-驱动滚轴,331-定位槽,340-胶套,341-环形凸起面,350-传动组件,351-第一齿轮,3511-第一孔,352-第二齿轮,3521-第二孔,361-第一轴承,362-第二轴承。
具体实施方式
45.除非另有定义,本文所使用的所有技术和科学术语与属于本实用新型技术领域的技术人员通常理解的含义相同;本文在说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型,例如,术语“长度”、“宽度”、“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是便于描述,不能理解为对本技术方案的限制。
46.本实用新型的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含;本实用新型的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
47.本实用新型的说明书和权利要求书及上述附图说明中,当元件被称为“固定于”或“安装于”或“设置于”或“连接于”另一个元件上,它可以是直接或间接位于该另一个元件上。例如,当一个元件被称为“连接于”另一个元件上,它可以是直接或间接连接到该另一个元件上。
48.此外,在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本实用新型的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
49.随着生活水平的不断提高和科学技术的不断发展,人们开始追求更加便利的智能化生活,具备不同功能的智能设备不断出现,扫地机器人即为应运而生的一种智能设备。
50.扫地机器人可以包括:滚轴、滚筒和毛刷,可以在滚筒的两端设置齿轮,从而通过齿轮带动滚轴和毛刷转动,最终实现对滚筒的有效清理。然而由于受到滚筒结构的体积限制,不方便在滚轴的侧面设置齿轮,因此亟需一种传动机构实现滚筒驱动滚轴和毛刷转动。
51.故本技术实施例提出一种传动机构,通过滚筒与滚轴之间产生的摩擦传动,以及
在滚轴和毛刷之间通过设置的齿轮传动,可以实现滚筒驱动滚轴和毛刷转动的目的。
52.在应用传动机构的清扫场景中,本技术实施例可以提供一种扫地机器人,包括:垃圾盒、滚筒、毛刷和传动机构;上述传动机构可以与垃圾盒进行配合,垃圾盒用于收纳通过毛刷对滚筒进行清理后的灰尘。
53.现结合附图,对本技术实施例提出的传动机构进行详细说明。
54.首先对本技术实施例提供的一种传动机构所涉及的清扫场景进行介绍。
55.参见图1a,图1a示出了本技术实施例提供的一种传动机构所涉及的清扫场景,该清扫场景中可以包括:扫地机器人a和灰尘杂物b。
56.其中,参见图1b,扫地机器人a可以包括:滚筒10、毛刷20、传动机构30和垃圾盒40。
57.而且,该清扫场景可以为室内环境,例如,该清扫场景可以为办公室、家庭住所或教室等,本技术实施例对该清扫场景不做限定。
58.在扫地机器人a运行过程中,扫地机器人a可以根据预先规划的路线在室内环境中行进,并在行进过程中,通过滚筒10对地面出现的灰尘杂物b进行清理,使得灰尘杂物b粘附在滚筒10表面,从而完成对地面的清洁。
59.进一步地,为了提高滚筒10对灰尘杂物b的粘附力,可以通过毛刷20对滚筒10进行清理,从而将清理后的垃圾加入垃圾盒40内。具体地,在扫地机器人a行进过程中,传动机构30基于转动的滚筒10,驱动毛刷20进行转动,且毛刷20转动的方向与滚筒10转动的方向相同,从而通过毛刷20对滚筒10表面粘附的垃圾进行清扫。
60.以下对上述清扫场景中扫地机器人a的传动机构30进行介绍。参见图2、图3和图4,图2为本实用新型提供的一种传动机构的结构示意图,图3为本实用新型提供的一种第一安装座的结构示意图,图4为本实用新型提供的一种驱动滚轴的局部放大示意图。
61.如图2至图4所示,该传动机构30可以包括:第一安装座310、驱动滚轴330和传动组件350。
62.其中,毛刷20的一端和驱动滚轴330的一端均可以与第一安装座310转动连接,驱动滚轴330与滚筒10相接触。
63.滚筒10的内部设置有驱动装置,当驱动装置驱动滚筒10转动时,在摩擦力的作用下,滚筒10带动驱动滚轴330反向旋转。驱动滚轴330通过传动组件350驱动毛刷20转动,毛刷20的转动方向与滚筒10的转动方向相同。
64.在一种可选实施例中,传动机构30还可以包括:至少一个胶套340。
65.其中,至少一个胶套340套设在驱动滚轴330的外表面,并与滚筒10相接触,胶套340用于通过滚筒10驱动驱动滚轴330转动。
66.例如,若胶套340只设置有一个时,则该胶套340可以套设在驱动滚轴330的中间;若胶套340设置有两个时,两个胶套340分别套设在驱动滚轴330的两端;其中,将两个胶套340分别套设在驱动滚轴330的两端,在保证足够摩擦力的同时,可方便胶套340的安装。若胶套340设置有多个是,则多个胶套340可以等间距排布在驱动滚轴330上;本技术实施例对每个胶套340的排布方式不做具体限定。
67.进一步地,驱动滚轴330上可以设置有至少一个定位槽331,每个定位槽331与每个胶套340一一对应,每个胶套340分别套设在对应的定位槽331上。定位槽331在安装胶套340时能够提高安装对位的效率,降低了胶套340的安装难度。
68.需要说明的是,在胶套340与滚筒10之间的摩擦力足以驱动传动组件350和驱动滚轴330的情况下,还可以对胶套340的长度进行适当调整,以便胶套340的安装维护更为便捷,同时可降低胶套340沾染滚筒10上灰尘毛发的概率,保证胶套340与滚筒10之间的正常传动。例如,胶套340的长度可以为2厘米(cm),本技术实施例对胶套340的长度不做具体限定。
69.另外需要说明的是,在实际应用中,胶套340和定位槽331的数量相等,两者可以配套使用,但胶套340的具体数量可以进行适当调整,需要增大摩擦力时可增加数量,需要降低摩擦力时可减少数量。
70.需要说明的是,胶套340可以为柔性材料,以便于胶套340的安装以及后期的维修更换,并在一定程度上增大了驱动滚轴330与滚筒10之间的摩擦力。另外,胶套340的表面可以设置有防滑纹,可以增大胶套340与滚筒10之间的摩擦力,在一定程度上可以提高传动机构30的传动效率。此外,驱动滚轴330的硬度大于胶套340的硬度,以便在工作状态下,可以保持胶套340和驱动滚轴330之间的稳定性,胶套340不易发生位移,从而避免产生机器故障。
71.在另外的实施例中,请参照图5,传动机构还可以只设置一个胶套340,其中,胶套340表面上间隔设置有至少两个环形凸起面341,每个环形凸起面341与滚筒10相接触,胶套340的长度为驱动滚轴330的长度的50%到90%。
72.其中,增加环形凸起面341可以降低胶套340与滚筒10的接触面,降低胶套340沾染滚筒10表面灰尘毛发的概率,保证驱动滚轴330与滚筒10的正常传动;通过限定胶套340的长度为驱动滚轴330的长度的50%到90%,可以保证胶套340与驱动滚轴330连接的稳定性,只需调整胶套340位置即可保证胶套340上环形凸起面341的位置,无需额外在驱动滚轴330上开设定位槽331,有效的降低生产成本。
73.需要说明的是,所述驱动滚轴330为金属杆,进行定位槽331加工的成本较高,本技术通过在一个长度较长的胶套上设置环形凸起面341,无需设置定位槽331也能保证环形凸起面341位置稳定,即可有效的降低生产成本。
74.在另一种可选实施例中,参见图2和图6,图6为本实用新型提供的一种传动组件的局部放大示意图。传动组件350可以包括:第一齿轮351和第二齿轮352。
75.其中,第一齿轮351与毛刷20的至少一端周向固定连接,第二齿轮352与驱动滚轴330的至少一端周向固定连接,第一齿轮351与第二齿轮352相互啮合,驱动滚轴330可以通过第一齿轮351和第二齿轮352驱动毛刷20转动。
76.具体地,当滚筒10转动时,滚筒10带动驱动滚轴330反向转动,驱动滚轴330带动第二齿轮352转动,第一齿轮351跟随第二齿轮352转动,相应的,第一齿轮351带动毛刷20转动,使得毛刷20与滚筒10同向转动,从而实现对滚筒10的清理。
77.进一步地,参见图6和图7,图7为本实用新型提供的另一种传动组件的局部放大示意图。第一齿轮351上可以设置有第一孔3511,第二齿轮352可以设置有第二孔3521。毛刷20可以通过第一孔3511与第一齿轮351周向固定连接,驱动滚轴330可以通过第二孔3521与第二齿轮352周向固定连接,从而可以有效防止工作状态下的驱动滚轴330与第二齿轮352之间、以及毛刷20与第一齿轮351之间打滑,可以提高传动机构30进行传动的可靠性。
78.需要说明的是,在实际应用中,第一孔3511和第二孔3521的形状可以为规则图形,
也可以为不规则图形,本技术实施例对此不做限定。例如,第一孔3511可以为半圆形,第二孔3521可以为矩形。本技术实施例对第一孔3511和第二孔3521的具体形状也不做限定。
79.在另一种可选实施例中,参照图2和图8,传动机构30还可以包括:第二安装座320。
80.其中,毛刷20远离第一安装座310的一端和驱动滚轴330远离第一安装座310的一端均与第二安装座320转动连接,从而保证了驱动滚轴330在工作时的稳定性。
81.需要说明的是,参见图2,本技术实施例提供的传动机构30还可以包括:第一轴承361和第二轴承362。
82.驱动滚轴330可以通过第一轴承361转动设置在第一安装座310上,驱动滚轴330可以通过第二轴承362转动设置在第二安装座320上,通过设置第一轴承361与第二轴承362,可以降低驱动滚轴330工作时的能量损失,进一步提高传动机构30的传动效率。
83.综上所述,本技术实施例提出一种传动机构,传动机构包括第一安装座310、驱动滚轴330和传动组件350;毛刷20的一端和驱动滚轴330的一端均与第一安装座310转动连接;驱动滚轴330与滚筒10相接触。通过滚筒10与驱动滚轴330之间的摩擦力进行摩擦传动,无需在滚筒10和驱动滚轴300之间安置齿轮,即可使驱动滚轴330基于滚筒10的转动驱动毛刷20进行转动,不但可以减少滚筒所占用的空间,还可以提高滚筒驱动毛刷和驱动滚轴的灵活性和便捷性。通过将驱动滚轴330贴合设置在滚筒10一侧,在摩擦力的作用下可实现滚筒10带动驱动滚轴330转动,再通过在驱动滚轴330和毛刷20之间设置传动组件350,即可实现滚轴10与毛刷20的传动连接,继而带动毛刷20转动,即本实用新型在不增加扫地机器人横向长度的前提下,通过滚轴10和传动组件350的配合实现了滚筒10和毛刷20之间的传动,具有结构简单,生产成本低等特点。
84.以上所描述的仅为本实用新型的较佳实施例,上述具体实施例不是对本实用新型的限制。在本实用新型的技术思想范畴内,可以出现各种变形及修改,凡本领域的普通技术人员根据以上描述所做的润饰、修改或等同替换,均属于本实用新型所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1